Изобретение относится к области прецизионного приборостроения и может быть использовано при производстве и эксплуатации электростатических гироскопов со сферическим ротором.
Известен электростатический гироскоп [П.И. Малеев, "Новые типы гироскопов", Ленинград, Судостроение, 1971 г., стр. 18], содержащий герметичный корпус, выполненный из непроводящего материала (керамики), сферический ротор с рисунком для оптического датчика угла, электростатический подвес ротора, включающий систему электродов, размещенных (напыленных) на внутренней поверхности корпуса попарно вдоль трех взаимно перпендикулярных осей, трехканальную систему управления положением ротора относительно электродов и высоковольтный источник напряжения, ограничительные упоры, установленные в корпусе попарно вдоль трех взаимно перпендикулярных осей, оптический датчик угла, систему разгона ротора, систему демпфирования угловых колебаний ротора.
Недостатками данного гироскопа являются малая точность и надежность. Указанные недостатки обусловлены несовершенством конструкции и технологическими погрешностями изготовления электродов подвеса. В реальных приборах в конструкции электродов всегда присутствуют острые кромки, пики шероховатости поверхности и т.д. В этих местах при подаче на электроды высокого напряжения нарушается однородность электростатического поля, на острых выступах повышается концентрация электрических зарядов. Возникает процесс их утечки (стекания) с указанных неровностей на поверхность ротора. При этом ротор получает избыточные электрические заряды (происходит его зарядка), количество которых увеличивается со временем. Взаимодействие электрических зарядов ротора с полем подвеса приводит к возникновению возмущающего момента.
При выключении гироскопа (электростатического подвеса) ротор касается изолированных упоров. Заряд на роторе сохраняется. При повторных включениях процесс повторяется. В результате происходит накопление заряда на роторе (рост от пуска к пуску возмущающего момента). При многократном включении прибора появляется вероятность отказа гироскопа.
Известен также электростатический гироскоп [С.С. Гуревич и др. "Система ориентации орбитальных космических аппаратов на базе бескарданных электростатических гироскопов со сплошным ротором", VIII Санкт-Петербургская международная конференция по интегрированным навигационным системам, Санкт-Петербург, ГНЦ РФ ЦНИИ "Электроприбор", 2001 г., стр. 52], который принимаем за прототип.
Электростатический гироскоп содержит герметичный корпус, выполненный из токопроводящего материала (для защиты от внешних полей), сферический ротор, с нанесенным на его поверхность рисунком для оптического датчика угла, электростатический подвес ротора, включающий систему изолированных от корпуса электродов, систему управления положением ротора относительно электродов и высоковольтный источник напряжения, общая клемма (клемма с нулевым потенциалом) высоковольтного источника подключена к корпусу, токопроводящие ограничительные упоры, установленные на внутренней поверхности корпуса, упоры соединены друг с другом электрическим проводником (корпусом) и электрически связаны с ним, оптический датчик угла, систему разгона ротора, систему демпфирования угловых колебаний ротора.
В процессе работы ротор данного гироскопа также получает объемный заряд. Однако каждый раз при выключении прибора (подвеса) происходит его разрядка. Ротор касается ограничительных токопроводящих упоров. Образуется цепь разряда через упоры на корпус, соединенный с общей клеммой высоковольтного источника. Накопление заряда на роторе от пуска к пуску не происходит.
Недостатками данного гироскопа являются малая точность и малая надежность. Указанные недостатки обусловлены тем, что при подаче на электроды напряжения (включении подвеса) в роторе происходит перераспределение электрических зарядов (увеличение концентрации электрических зарядов в части ротора, расположенной под электродом с максимальным напряжением, и уменьшение в противоположной части ротора, соприкасающейся с упорами, подключенными через корпус к общей клемме высоковольтного источника). В результате между ротором и общей клеммой высоковольтного источника образуется разность потенциалов. Так как напряжение на электродах возрастает до напряжения, при котором происходит взвешивание ротора (отрыв от упоров) не мгновенно, то за время его нарастания под действием разности потенциалов (между ротором и общей клеммой источника) часть электрических зарядов через упоры перемещается на ротор. Ротор получает электрический заряд. Как было уже отмечено выше, взаимодействие электрических зарядов ротора с полем подвеса приводит к возникновению возмущающего момента, к уменьшению точности гироскопа.
Другим источником уменьшения точности является то, что связь ротора, лежащего на упорах с корпусом, подключенным к точке с нулевым потенциалом, приводит к снижению точности измерения емкости между ротором электродами подвеса. Недостоверные измерения емкости приводят к вероятности неправильной настройки подвеса и, как следствие, к уменьшению точности гироскопа.
Малая надежность обусловлена следующим. При выключении подвеса напряжение на электродах уменьшается до нуля не мгновенно. Соответственно с изменением напряжения уменьшается и зазор между ротором и упорами. При постепенном уменьшении зазора напряженность электрического поля между заряженным ротором и упорами, с которыми он соприкоснется, увеличивается. При достижении напряженностью критического значения (перед самым касанием ротора упоров) происходит пробой зазора и возникает электрический разряд между ротором и одним из упоров. Между упором и ротором потечет ток разрядки. Заряд с ротора через упоры стекает на клемму нулевого потенциала высоковольтного источника питания. Из-за большой величины разрядного тока возникает перенос материала между поверхностью ротора и упором зазора. При этом возникает вероятность, что рисунок на поверхности ротора будет поврежден. Гироскоп перестанет функционировать.
Задачей настоящего изобретения является повышение точности и надежности электростатического гироскопа.
Поставленная задача решается тем, что в известном электростатическом гироскопе, содержащем герметичный корпус, выполненный из токопроводящего материала, сферический ротор с нанесенным на его поверхность рисунком для оптического датчика угла, электростатический подвес ротора, включающий систему изолированных от корпуса электродов, систему управления положением ротора относительно электродов и высоковольтный источник напряжения, общая клемма (клемма с нулевым потенциалом) высоковольтного источника подключена к корпусу, токопроводящие ограничительные упоры, установленные на внутренней поверхности корпуса, упоры соединены друг с другом электрическим проводником и подключены к корпусу, оптический датчик угла, систему разгона ротора, систему демпфирования угловых колебаний ротора, ограничительные упоры установлены на внутренней поверхности токопроводящего корпуса через электрический изолятор, а подключение упоров к корпусу осуществлено через резистор R, значение которого определяется из соотношения R>T/C, где С - значение емкости между электродами и ротором гироскопа, Т - время с момента включения высоковольтного источника до момента отрыва ротора от упоров.
Предлагаемое изобретение поясняется чертежом, на котором изображена функциональная схема электростатического гироскопа, где приняты следующие обозначения:
1 - корпус гироскопа,
2 - изолирующие прокладки электродов,
3 - электроды электростатического подвеса,
4 - ротор гироскопа,
5 - рисунок на поверхности ротора для оптического датчика угла,
6 - система управления электростатического подвеса (система управления положением ротора относительно электродов),
7 - высоковольтный источник напряжения,
8 - изолирующие прокладки ограничительных упоров,
9 - токопроводящие ограничительные упоры,
10 - электрический проводник, соединяющий упоры,
11 - система разгона ротора,
12 - система демпфирования угловых колебаний ротора,
"0" - клемма с нулевым потенциалом высоковольтного источника,
R - резистор.
Предлагаемый электростатический гироскоп содержит герметичный корпус 1, выполненный из токопроводящего материала. Внутри корпуса 1 через изолирующие прокладки 2 попарно вдоль трех взаимно перпендикулярных осей (для упрощения третья ось на рисунке не показана) установлена система электродов 3. Между электродами 3 размещен сферический ротор 4 с нанесенным на его поверхность рисунком 5 для оптического датчика угла (датчик угла на рисунке не показан). Электроды 3 подсоединены к системе 6 управления положением ротора 4. К системе 6 подключен высоковольтный источник 7 напряжения. Общая клемма "0" (клемма с нулевым потенциалом) высоковольтного источника 7 подключена к корпусу 1. На внутренней поверхности корпуса 1 попарно вдоль трех взаимно перпендикулярных осей через изолирующие прокладки 8 установлены токопроводящие ограничительные упоры 9 (на рисунке упоры по третьей оси не показаны). Упоры 9 соединены друг с другом электрическим проводником 10 и подключены через резистор R к корпусу 1. Значение резистора R определено из соотношения R>T/C, где Т - время с момента включения высоковольтного источника 7 до момента отрыва ротора 4 от упоров, С - значение емкости между электродами 3 и ротором 4 гироскопа. В корпусе 1 установлена также система 11 разгона ротора 4, система 12 демпфирования угловых колебаний ротора 4.
Значение резистора R рассчитывается из условия, что постоянная времени RC (время заряда емкости, образованной ротором 4 и электродами 3) должна быть больше времени нахождения ротора на упорах 9 (времени с момента включения источника 7 питания до момента отрыва ротора 4 от упоров 9). При этом на ротор 4 успеет перетечь ограниченное число зарядов. В идеальном случае при R, равном бесконечности, число перешедших на ротор 4 зарядов будет равно нулю. Для реальных гироскопов значение R находится на уровне нескольких мОм.
Работа предлагаемого электростатического гироскопа происходит следующим образом. При выключенном подвесе ротор 4 лежит (касается) на упорах 9. Его потенциал равен потенциалу на клемме "0" источника 7. Ротор 4 находится в разряженном состоянии. При включении источника 7 на верхний электрод (см. рисунок) подается напряжение. Под влиянием электростатического поля, образующегося в зазоре, происходит перераспределение электрических зарядов в роторе 4. Между ротором 4 и клеммой "0" высоковольтного источника 7 образуется разность потенциалов. Под действием разности потенциалов электрические заряды начнут перемещаться от клеммы "0" источника 7 в направлении ротора 4. Однако их перемещению препятствует установленный в этой цепи резистор R. При значении сопротивления резистора R, равном бесконечности, количество перемещенных зарядов становится равным нулю. Точность работы гироскопа за счет уменьшения (исключения) заряда, получаемого ротором 4 при его взвешивании, повышается.
После взвешивания положение ротора 4 относительно электродов 3 регулируется системой 6 управления подвесом. Далее включают систему 11 разгона, раскручивают ротор 4 до рабочей скорости. Включают систему 12 демпфирования, демпфируют нутационные колебания ротора 4. После затухания нутационных колебаний в течение заданного промежутка времени (в течение пуска) измеряют сигнал датчика угла гироскопа. За это время ротор 4 получает объемный заряд.
При выключении прибора осуществляют сначала торможение ротора 4. Далее выключают подвес. При выключении высоковольтного источника 7 происходит плавное уменьшение напряжения на электродах 3 (плавное уменьшение зазора между заряженным ротором 4 и упорами 9). При достижении напряженностью критического значения (перед самым касанием ротора 4 упоров 9) происходит пробой зазора. Ток разрядки за счет включения в цепь резистором R мал. В идеальном случае при R, равном бесконечности, значение тока становится равным нулю. Повреждения поверхности не происходит. Надежность работы гироскопа повышается.
Точность работы гироскопа повышается также за счет повышения точности измерения емкости. Точность повышается за счет исключения (уменьшения) влияния паразитных емкостей между корпусом и электродами.
Таким образом, в результате реализации предлагаемого технического решения точность и надежность гироскопа повышается. Точность повышается за счет уменьшения (исключения) заряда ротора при его взвешивании в подвесе и за счет повышения точности измерения емкости между ротором и электродами при регулировании подвеса, повышения точности регулирования подвеса. Надежность повышается за счет уменьшения вероятности повреждения поверхности ротора от воздействия тока при разряде ротора (уменьшения тока разряда). Поставленная задача решена.
На предприятии ЦНИИ "Электроприбор" предлагаемое техническое решение реализовано. При испытаниях получены положительные результаты. В настоящее время разрабатывается техническая документация для его применения при производстве электростатических гироскопов.
Технико-экономическая эффективность изобретения заключается в повышении точности и надежности электростатического гироскопа со сферическим ротором и, следовательно, точности и надежности систем, в которых он применяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРИВЕДЕНИЯ В РАБОЧЕЕ СОСТОЯНИЕ ЭЛЕКТРОСТАТИЧЕСКОГО ШАРОВОГО ГИРОСКОПА | 2001 |
|
RU2206874C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2001 |
|
RU2193162C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПОЛОГО РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 1994 |
|
RU2116622C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2167396C2 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОСКОПА С ЭЛЕКТРИЧЕСКИМ ПОДВЕСОМ РОТОРА | 1994 |
|
RU2116624C1 |
| ГИРОКАМЕРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2001 |
|
RU2193159C1 |
| СИСТЕМА ДЕМПФИРОВАНИЯ СФЕРИЧЕСКОГО РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2003 |
|
RU2235293C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НОМИНАЛЬНОЙ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2004 |
|
RU2269745C1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА ИЗГОТОВЛЕНИЯ МИКРОМЕХАНИЧЕСКИХ УСТРОЙСТВ | 2003 |
|
RU2244271C1 |
Изобретение относится к области прецизионного приборостроения и может быть использовано при производстве и эксплуатации электростатических гироскопов со сферическим ротором. Гироскоп включает герметичный корпус, выполненный из токопроводящего материала, сферический ротор с нанесенным на его поверхность рисунком для оптического датчика угла, электростатический подвес ротора, включающий систему изолированных от корпуса электродов, систему управления положением ротора относительно электродов и высоковольтный источник напряжения, общая клемма (клемма с нулевым потенциалом) которого подключена к корпусу, токопроводящие ограничительные упоры, установленные на внутренней поверхности корпуса через электрический изолятор и соединенные друг с другом электрическим проводником, оптический датчик угла, систему разгона ротора, систему демпфирования угловых колебаний ротора, при этом подключение упоров к корпусу осуществлено через резистор R, значение которого определяется из соотношения R>Т/С, где С - значение емкости между электродами и ротором гироскопа, Т - время с момента включения высоковольтного источника до момента отрыва ротора от упоров. Техническим результатом является повышение точности и надежности. 1 ил.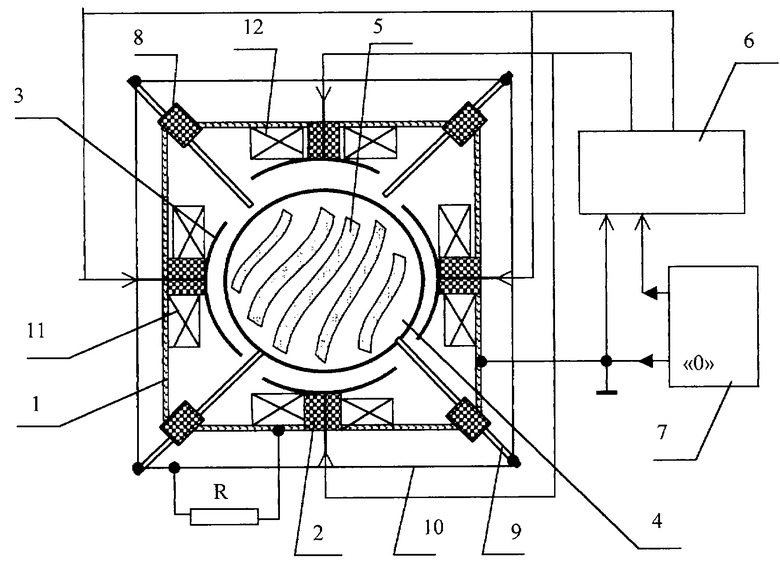
Электростатический гироскоп, содержащий герметичный корпус, выполненный из токопроводящего материала, сферический ротор, электростатический подвес ротора, включающий систему изолированных от корпуса электродов, систему управления положением ротора относительно электродов и высоковольтный источник напряжения, клемма с нулевым потенциалом которого подключена к корпусу, токопроводящие ограничительные упоры, установленные на внутренней поверхности корпуса, соединенные друг с другом электрическим проводником и подключенные к корпусу, систему съема информации об угловом положении ротора относительно корпуса, включающую рисунок, нанесенный на поверхности ротора, и оптические датчики, систему разгона ротора, систему демпфирования угловых колебаний ротора, отличающийся тем, что ограничительные упоры установлены на внутренней поверхности герметичного корпуса через электрический изолятор, а подключение упоров к корпусу осуществлено через резистор R, значение которого определяется из соотношения R>T/С, где С - значение емкости между электродами и ротором гироскопа, Т - время с момента включения высоковольтного источника до момента отрыва ротора от упоров.
| ГУРЕВИЧ С.С | |||
| и др | |||
| Система ориентации орбитальных космических аппаратов на базе бескарданных электростатических гироскопов со сплошным ротором | |||
| VIII Санкт-Петербургская международная конференция по интегрированным навигационным системам | |||
| - С.-Пб.: ГНЦ РФ ЦНИИ "Электроприбор", 2001, с | |||
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
| МАЛЕЕВ Г.И | |||
| Новые типы гироскопов | |||
| -Л.: Судостроение, 1971, с | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОСКОПА С ЭЛЕКТРИЧЕСКИМ ПОДВЕСОМ РОТОРА | 1994 |
|
RU2116624C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП С ОПТИЧЕСКИМ СЧИТЫВАНИЕМ ПОЛОЖЕНИЯ ОСИ РОТОРА | 1994 |
|
RU2104491C1 |
| US 4078436 A, 14.03.1978 | |||
| US 3697143 A, 10.10.1972. | |||

