Изобретение относится к радиолокации, в частности к области измерения азимута с помощью обзорной радиолокационной станции (РЛС), и может быть использовано в аппаратуре первичной обработки радиолокационной (р/л) информации, являющейся оконечной частью РЛС.
Изобретение направлено на уменьшение погрешности в определении азимута обнаруженной р/л цели.
Погрешность в определении азимута складывается из двух составляющих:
- ошибки в определении центрального импульса пакета;
- ошибки в считывании азимута.
Предлагаемое изобретение направлено на уменьшение ошибки при считывании азимута.
Известен способ измерения азимута р/л цели и устройство, его реализующее, описанные в [1] (стр. 436, 437, рис. 8.27).
Сущность этого способа сводится к нахождению центрального импульса пакета, формированию сигнала, соответствующего центру пакета обнаруженной цели, и считыванию этим сигналом углового положения антенны в качестве азимута обнаруженной цели.
Недостатком способа [1] является погрешность в определении азимута р/л цели, связанной со считыванием азимута.
Большая погрешность возникает из-за того, что полученный сигнал центра пакета считывает азимут непосредственно с углового датчика антенны.
Наиболее близким к заявляемому изобретению является способ и устройство, его реализующее, описанные в [2] (стр. 95-97, рис. 2.16).
Этот способ включает следующие операции:
- запоминание принимаемых сигналов в движущемся "окне", ширина которого соответствует длительности пачки;
- взвешивание амплитуд каждого принимаемого сигнала в соответствии со значениями соответствующих весовых коэффициентов;
- образование полусумм взвешенных амплитуд, принятых в движущемся "окне" сигналов слева и справа от нулевого значения весовой функции;
- сравнение полусумм и фиксация позиции, где результат сравнения проходит через нулевое значение;
- считывание кода азимута р/л цели полученным сигналом.
Заметим, что в описанном в [2] способе и устройстве не упоминается всегда имеющая место операция устранения систематической ошибки, равной половине расчетной ширины диаграммы направленности антенны. Необходимость этой операции связана со следующим.
Решение о нахождении центра пакета может быть выработано только после того, как будет принят весь р/л пакет. Это означает, что это решение будет запаздывать относительно центрального импульса пакета (центра пакета) на систематическую ошибку, равную половине расчетной угловой ширины р/л пакета, и на случайную знакопеременную ошибку определения центра пакета. Систематическая ошибка будет существовать независимо or способа и конкретной реализации нахождения центра р/л пакета. Таким образом, необходима операция, устраняющая эту систематическую ошибку.
Будем считать необходимость этой операции общеизвестной.
Указанный способ может быть сведен к обобщенным операциям, которые заключаются в том, что
- задерживается импульс Север на половину расчетной угловой ширины р/л пакета;
-измеряется азимут антенны кругового обзора радиолокационной станции относительно направления задержанного импульса Север;
- определяется центр пакета каждой обнаруженной цели;
- считывается азимут цели сигналом "Центр пакета обнаруженной цели".
Недостаток прототипа заключается в недостаточной точности измерения азимута р/л цели, обусловленной ошибкой считывания азимута, а именно тем, что азимут считывается сигналом центра пакета непосредственно со счетчика азимута. В связи с этим, для целей, находящихся на одном азимуте, но на разных дальностях, будет измерен разный азимут.
Для подтверждения этого недостатка рассмотрим следующее.
Предположим имеются три р/л цели, находящиеся на одном азимуте, но на разных дальностях.
Предположим, что в результате проведенных операций для всех трех обнаруженных целей выработались сигналы центра пакета в одном зондировании, что и подтверждает их одинаковый азимут.
Общеизвестно, что зондирующие импульсы обзорной РЛС, которыми облучаются р/л цели, и масштабные азимутальные импульсы, определяющие угол поворота антенны относительно направления на СЕВЕР, являются несинхронными и имеют разные периоды повторения.
Для удобства конкретизируем некоторые параметры, хотя их численные величины принципиального значения не имеют.
Обычно количество масштабных импульсов азимута (МАИ) за один оборот антенны составляет 4096.
Типичный период обзора трассовых РЛС-Тобз=10 сек.
Тогда период МАИ составит:
ТМАИ=ТСЕВЕР/4096=10000 м•сек/4096≈2,44 м•сек.
Угловая дискрета Δβ /угол между МАИ/ при этом составит
360/4096≈0,88 градуса или 0,88*60≈5,27 минуты.
Типичная максимальная дальность обнаружения (рабочая дальность) трассовой РЛС составляет 400 км, что соответствует временному интервалу Траб.дальн. =2,666 м•сек.
Типичная величина периода зондирующих импульсов, которыми облучается пространство, и соответствующих им импульсов запуска равно Тиз=3 м•сек.
На фиг. 1 приведена блок-схема способа-прототипа.
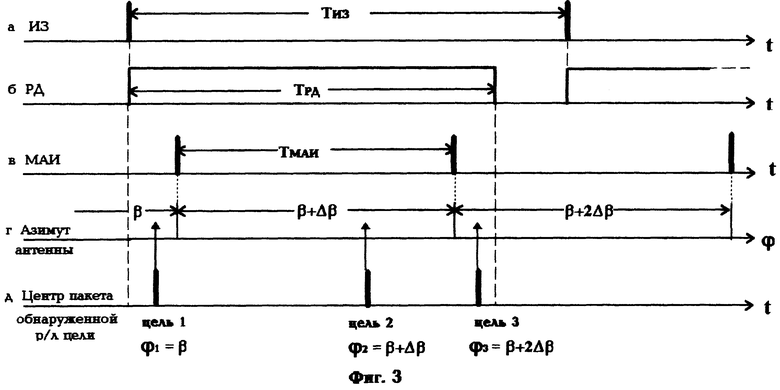
На фиг. 2 представлены временные диаграммы, поясняющие как производится считывание азимута р/л цели в прототипе и вскрывающие недостатки, присущие такому считыванию азимута. На фиг. 2 приведены:
а - импульсы запуска - ИЗ;
б - интервал, рабочей дальности от 0 км до 400 км - РД;
в - масштабные азимутальные импульсы - МАИ;
г - значение азимута, изменяющееся после каждого МАИ;
д - центр пакета обнаруженной цели.
Из рассмотрения диаграмм видно, что в представленном зондировании взаимное расположение ИЗ (а) и МАИ (в) таково, что в течение интервала рабочей дальности - РД (б) азимут антенны ϕ (г) изменяется дважды. В начале дальности азимут ϕ антенны равен β, затем после прихода первого МАИ в данном интервале рабочей дальности азимут изменяется на величину угловой дискретности Δβ и становится равным β+Δβ. После прихода второго МАИ в течение того же интервала рабочей дальности азимут антенны изменяется еще на величину Δβ и становится уже равным β+2Δβ.
На диаграмме (д) представлены три сигнала "центр пакета обнаруженной цели", сформированные в данном зондировании на разных дальностях в пределах рабочей дальности.
Из-за того что сигнал "центр пакета обнаруженной цели" считывает азимут непосредственно со счетчика азимута, будут получены три различных значения азимута: β,β+Δβ и β+2Δβ, что иллюстрируется "стрелкой", исходящей из каждого сигнала "центр пакета обнаруженной цели" к диаграмме "Азимут антенны" (г).
Таким образом, процедура определения центра обнаруженного пакета правильно установила, что центр пакета всех трех целей находится в одном зондировании. Это означает, что центральный импульс у данных пакетов произошел от одного и того же зондирующего импульса. Однако процедура считывания азимута привела к тому, что азимут у этих целей оказался различным.
Такая точность измерения азимута р/л цели не может считаться удовлетворительной. Кроме того, тем самым снижается ценность точного определения центрального импульса пакета обнаруженной цели.
Вариант устройства, реализующего известный способ, приведен на фиг.3 ([2], рис. 2.18).
Устройство содержит счетчик 1, счетный вход которого соединен с шиной МАИ, а вход обнуления которого соединен с шиной Север через блок задержки 2, и блок схем И 3, первые входы которых соединены с шиной сигнала "Центр пакета обнаруженной цели", вторые входы которых соединены с выходами счетчика 1, а выходы являются выходами устройства.
Устройство работает следующим образом.
Импульс "Север" задерживается в блоке задержки 2 на интервал времени, соответствующий половине расчетной угловой ширины р/л пакета.
После прохождения блока задержки 2 импульс "Север" обнуляет счетчик 1, подготавливая его к началу нового обзора. Затем с приходом каждого МАИ изменяется значение счетчика 1. Код азимута поступает на вторые входы схем И блока 3.
Каждый сигнал "центр пакета обнаруженной цели", приходя на первые входы схем И, разрешает коду азимута пройти на выход схем И блока 3 в качестве азимута данной цели.
Если в данном зондировании в интервале между двумя импульсами "центр пакета обнаруженной цели" придет МАИ, то эти цели окажутся с разными азимутами. На фиг.3 (в) и (г) в качестве примера показано как за интервал рабочей дальности РД (б) дважды приходят МАИ, дважды изменяется азимут антенны ϕ. Поэтому для трех целей, для которых сигналы "центр пакета обнаруженной цели" образовались в данном зондировании, считываются различные значения азимутов, несмотря на то, что они находятся под одним азимутом.
Предлагаемое изобретение направлено на уменьшение ошибки при считывании азимута.
Задача, решаемая предлагаемым способом, состоит в увеличении точности измерения азимута р/л цели путем определения азимута каждого зондирующего импульса и присвоении этого азимута тем р/л целям, чей центр пакета определен в данном зондировании.
Это достигается следующим образом.
В существующий способ измерения азимута радиолокационной цели, состоящий в том, что задерживается импульс Север на половину расчетной угловой ширины р/л пакета, измеряется азимут антенны кругового обзора радиолокационной станции относительно направления задержанного импульса Севера, определяется центр пакета каждой обнаруженной цели, считывается азимут радиолокационной цели сигналом "Центр пакета обнаруженной радиолокационной цели",
вводится операция измерения азимута зондирующего импульса, которая проводится между измерением азимута антенны и считыванием азимута цели.
Предлагается также вариант устройства, реализующего этот способ.
Сущность изобретения разъясняется приведенными иллюстрациями.
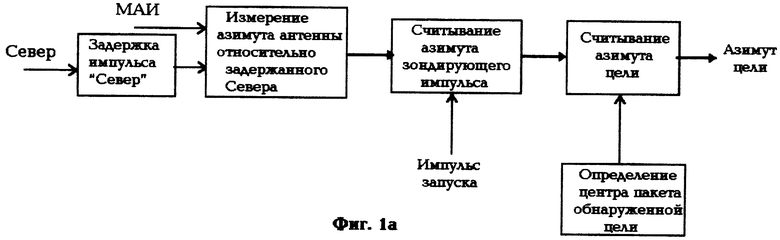
На фиг.1а представлена блок-схема предлагаемого способа.
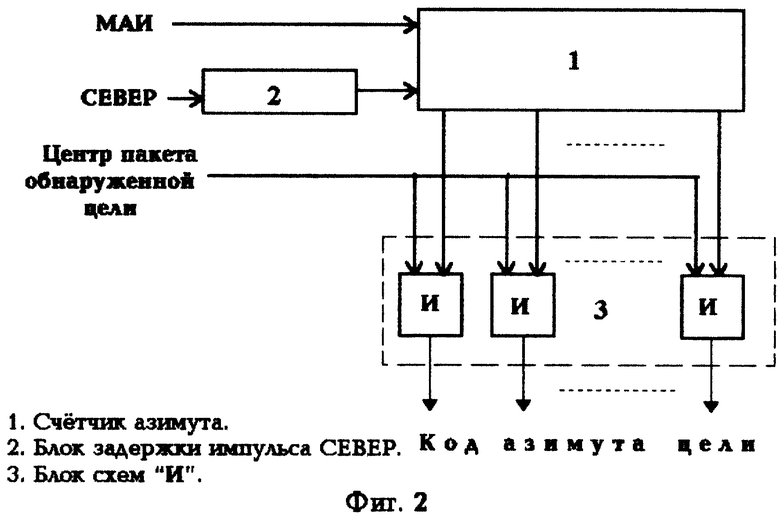
На фиг.2а представлен вариант устройства, реализующий предлагаемый способ.
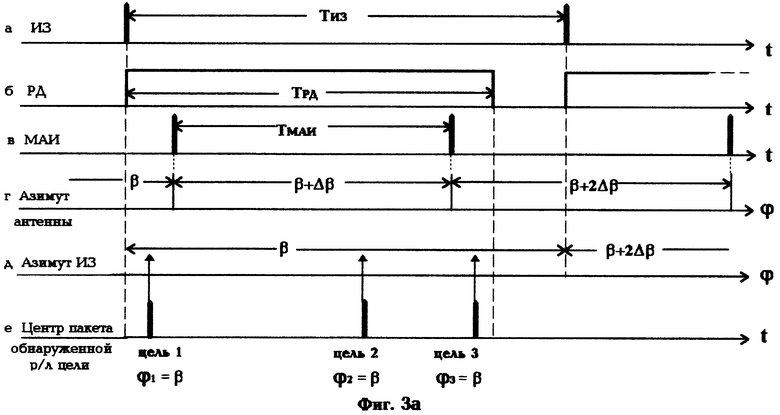
На фиг. 3а представлены временные диаграммы, иллюстрирующие операции предлагаемого способа.
Из фиг. 1а видно, что между операциями измерения азимута антенны РАС относительно задержанного Севера и считывания азимута обнаруженной цели введена операция считывания азимута зондирующего импульса (импульса запуска).
Поэтому, в результате операции считывания азимута цели в качестве азимута цели будет считан азимут зондирующего импульса. Таким образом, все обнаруженные цели, чей центр пакета пришелся на данное зондирование, будут иметь одинаковый азимут независимо от дальности цели.
На фиг.3а представлены:
а - импульсы запуска - ИЗ;
б - интервал рабочей дальности - РД;
в - масштабные азимутальные импульсы - МАИ;
г - азимут антенны;
д - задержанный азимут ИЗ;
е - центр пакета обнаруженной цели;
Из фиг.3а видно действие способа, изображенного на фиг.1а.
В момент прихода ИЗ азимут антенны равен β. Следовательно, ИЗ имеет азимут β. Это значение запоминается до прихода следующего ИЗ. Все обнаруженные цели, чей центр пакета определен в этом зондировании, считывает азимут ИЗ в качестве своего азимута, что проиллюстрировано "стрелкой", исходящей от каждого сигнала "центр пакета обнаруженной цели" к диаграмме "Азимут ИЗ".
Заметим, что при данном взаимном расположении ИЗ и МАИ не может быть целей, имеющих азимут β+Δβ, так как последовательно идущие ИЗ имеют азимут β и β+2Δβ (д).
Таким образом, видно, что достигается уменьшение ошибки измерения азимута путем присваивания азимута зондирующего импульса всем тем р/л целям, чей центр пакета находится в данном зондировании.
Сопоставительный анализ с прототипам показывает, что заявляемый способ отличается наличием новых операций.
Таким образам, заявляемый способ соответствует критерию "существенная новизна".
Предлагаемый способ при введении вышеуказанной новой операции совместно с операциями прототипа приобретает отличие, реализующее новое качество, позволяющее выдать один и тот же азимут для всех независимо от дальности обнаруженных целей, у которых центральный импульс пакета находится в данном зондировании.
Из этого можно сделать вывод о соответствии технического решения критерию " изобретательский уровень".
Пример устройства, реализующего предлагаемый способ, представлен на фиг. 2а.
Устройство содержит счетчик 1, счетный вход которого соединен с шиной сигнала "масштабный азимутальный импульс"(МАИ), вход обнуления которого соединен с шиной импульса "Север", через блок задержки 2, блок схем И 3, первые входы которых соединены с шиной сигнала "центр пакета обнаруженной цели", а выходы являются выходами устройства, регистр 4, входы которого соединены с выходами счетчика 1, вход записи в регистр соединен с шиной импульса запуска (ИЗ), соответствующего излучаемому зондирующему импульсу, а выходы соединены со вторыми входами схем И блока 3.
Работа устройства осуществляется следующим образом.
Каждый приходящий импульс СЕВЕР, пройдя блок задержки 2, обнуляет состояние счетчика 1.
На счетный вход счетчика 1 поступают импульсы МАИ, которые счетчик 1 подсчитывает в интервале от одного до другого Севера задержанного. Импульс запуска приходит на вход записи регистра 4 и записывает код азимута антенны, находящийся в счетчике 1, в регистр 4.
Таким образом, в течение данного зондирования сохраняется значение азимута данного зондирующего импульса.
С приходом в течение данного зондирования каждого сигнала "центр пакета обнаруженной пели" на выходах блока схем И 3 в качестве азимута р/л цели появится азимут зондирующего импульса, ранее запомненный в регистре 2.
Он будет одинаковым для всех тех р/л целей, для которых сигнал "центр пакета обнаруженной цели" появился в данном зондировании.
Таким образом, предлагаемое устройство реализует преимущества заявляемого способа.
Благодаря увеличению точности измерения угловой координаты р/л цели, достигаемой в предложенном решении,
- увеличивается разрешающая способность по азимуту;
- улучшается качество траекторных измерений при проведении вторичной обработки р/л информации в центре управления воздушным движением как в зоне аэропорта, так и на трассе.
Источники информации:
1. Теоретические основы радиолокации /под редакцией Дулевича/. Изд. "Советское радио", Москва, 1964 г.
2. Основы проектирования систем цифровой обработки радиолокационной информации. C.3.Кузьмин. Москва, "Радио и связь", 1986 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ АЗИМУТА РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ | 2006 |
|
RU2319980C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2004 |
|
RU2267797C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА В ПРОЦЕССЕ ЗАХВАТА И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ В СТРОБАХ | 2006 |
|
RU2306580C1 |
| СПОСОБ РАСПОЗНАВАНИЯ РАДИОЛОКАЦИОННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2317568C1 |
| Способ и станция резонансной радиолокации | 2016 |
|
RU2610832C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАХОДА НА ПОСАДКУ | 2006 |
|
RU2341774C2 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАХОДА НА ПОСАДКУ | 2004 |
|
RU2273590C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ МАЛОЗАМЕТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2534217C1 |
| УСТРОЙСТВО ДЛЯ ПУСКА РАКЕТ | 1981 |
|
RU2121647C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ЗОНЫ ПРОСТРАНСТВА | 2008 |
|
RU2377595C1 |


Способ относится к области радиолокации, а именно к радиолокационным системам измерения азимута с помощью обзорной радиолокационной станции (РЛС), и может быть использован в аппаратуре первичной обработки радиолокационной информации, являющейся оконечной частью РЛС. Повышение точности измерения азимута в обзорной РЛС путем измерения азимута каждого зондирующего импульса и присвоения этого значения азимута всем целям, для которых в данном зондировании выработался сигнал "Центр пакета обнаруженной радиолокационной цели", является достигаемым техническим результатом. Способ заключается в том, что задерживается сигнал "Север" на половину расчетной угловой ширины р/л пакета, измеряется азимут антенны кругового обзора РЛС относительно направления задержанного Севера, измеряется азимут зондирующего импульса, определяется центр пакета каждой обнаруженной цели, считывается азимут зондирующего импульса сигналом "Центр пакета обнаруженной цели", который принимается в качестве азимута радиолокационной цели. Устройство, реализующее способ, содержит счетчик, счетный вход которого соединен с шиной сигнала "масштабный азимутальный импульс" (МАИ), вход обнуления которого соединен с шиной сигнала "Север", через блок задержки, блок схем И, первые входы которых соединены с шиной сигнала "центр пакета обнаруженной цели", а выходы являются выходами устройства, регистр, входы которого соединены с выходами счетчика, вход записи в регистр соединен с шиной импульса запуска ИЗ (сигнала, соответствующего излучаемому зондирующему импульсу), а выходы соединены с вторыми входами схем И. 2 с.п.ф-лы, 6 ил.
| КУЗЬМИН С.З | |||
| Основы проектирования систем цифровой обработки радиолокационной информации | |||
| - М.: Радио и связь, 1986, с | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US 4591856, 27.05.1986 | |||
| СПОСОБ ФОСФАТИРОВАНИЯ МЕТАЛЛИЧЕСКИХ ИЗДЕЛИЙ | 0 |
|
SU351934A1 |
| ПЕЛЕНГАЦИОННЫЙ СПОСОБ КОНИЩЕВА ОПРЕДЕЛЕНИЯ ВРЕМЕННОГО ПОЛОЖЕНИЯ ВИДЕОИМПУЛЬСА | 1990 |
|
RU2018860C1 |

