Изобретение относится к области радиолокации и может быть использовано при сопровождении траекторий объектов в обзорных радиолокационных станциях (РЛС) с двумерной фазированной антенной решеткой (ФАР) с узким лучом по обеим угловым координатам.
Известен способ измерения угловых координат объекта в процессе захвата (обнаружения) и сопровождения траектории в стробах, включающий зондирование направлений строба, формирование двумерного углового пакета обнаруженных сигналов в соответствии заданным критерием объединения направлений в угловой пакет, вычисление угловых координат объекта (А.Фарина, Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение целей. М.: Радио и связь, 1993, с.25-27, 23).
Под направлением понимается положение луча антенны РЛС по углу места и азимуту. В процессе обзора пространства луч антенны дискретно перемещается от направления к направлению по заданной программе.
При зондировании направления осуществляется излучение зондирующего сигнала, прием отраженного от объекта сигнала, измерение амплитуды принятого сигнала, сравнение амплитуды сигнала с порогом, запоминание координат направления, в котором произошло обнаружение сигнала, и дальности до объекта.
В РЛС с бинарной обработкой сигнала измерение амплитуды принятого сигнала не проводится.
Под стробами захвата и сопровождения траектории понимается предварительно рассчитанная область в пространстве, в которой с известной достаточно высокой вероятностью будет находиться объект, движущийся в направлении и со скоростью, экстраполированными на основе предыдущих данных об объекте, через время, равное периоду обращения к объекту, осматриваемая с помощью зондирующих сигналов, излучаемых независимо от осмотра зоны регулярного обзора (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М.: Сов. радио, 1974, с.199).
В стробах захвата и сопровождения, как правило, обеспечивается вероятность обнаружения значительно более высокая, чем в зоне регулярного обзора.
Поясним понятие «двумерный угловой пакет обнаруженных сигналов».
В процессе обзора пространства радиолокационной станцией в каждое направление (положение луча антенны) излучается зондирующий сигнал, принимается сигнал, отраженный от объекта, измеряется его амплитуда и угловые координаты, определяется дальность до объекта. Принятый сигнал сравнивается с порогом обнаружения. В результате в каждом направлении для каждой дискреты по дальности в плоскости угол места-азимут (ε-β) на выходе порогового устройства присутствует сигнал, если он превышает уровень порога (сигнал обнаружен), сигнал на выходе порогового устройства отсутствует, если принятый сигнал ниже уровня порога (сигнал не обнаружен). Объект, находящийся на большой дальности, как правило, обнаруживается в одном направлении. С приближением объекта уровень отраженного сигнала возрастает, и объект обнаруживается в нескольких направлениях. Множество направлений, в которых обнаружены сигналы на одинаковой дальности, образует двумерный угловой пакет, если для любого направления этого множества выполняется заданный критерий объединения направлений в угловой пакет.
Сформированный двумерный угловой пакет обнаруженных сигналов является полным, если в его окрестности нет направлений, которые могли бы быть включены в пакет в соответствии с заданным критерием объединения направлений в угловой пакет.
Угловые координаты объекта, рассчитанные по полному угловому пакету обнаруженных сигналов, являются наиболее точными, т.к. при этом используется вся информация об объекте, полученная в процессе зондирования направлений.
Если в процессе формирования двумерного углового пакета параметры зондирования не меняются, то полный угловой пакет достаточно больших размеров практически симметричен относительно истинного положения объекта, т.е. объект расположен практически в центре полного двумерного углового пакета.
Отметим, что в известных способах не имеет значения, когда осуществляется формирование углового пакета - по мере зондирования направлений строба или по окончании зондирования всех его направлений.
Известный способ имеет следующий недостаток.
При определении угловых координат объекта в стробе используется геометрический центр координат направлений, в которых произошло обнаружение сигнала, т.е. геометрический центр двумерного углового пакета обнаруженных сигналов. Другие характеристики РЛС и углового пакета обнаруженных сигналов, такие как вид диаграммы направленности антенны РЛС, амплитуда и закон флюктуации обнаруженных сигналов, в известном способе не учитываются. Вследствие чего точность измерения угловых координат объекта оказывается низкой.
Таким образом, недостатком известного технического решения является низкая точность измерения угловых координат.
Наиболее близким к заявляемому является способ измерения угловых координат объекта в процессе захвата и сопровождения траектории в стробах, включающий зондирование направлений строба, формирование двумерного углового пакета обнаруженных сигналов в соответствии заданным критерием объединения направлений в угловой пакет, вычисление угловых координат объекта (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М.: Сов. радио, 1974, с.198-200). Угловые координаты объекта при этом определяют известными методами на основании анализа характеристик двумерного углового пакета обнаруженных сигналов, сформированного в стробе захвата или сопровождения (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М.: Сов. радио, 1974, с.152-155).
В качестве критерия объединения направлении в двумерный угловой пакет может быть выбрано угловое расстояние КПАК между данным направлением и ближайшим к нему направлением в пакете.
Направление, в котором произошло обнаружение сигнала, включается в существующий угловой пакет, если выполняется условие (выполняется заданный критерий объединения направлений в пакет):

где Δε, Δβ - угловые расстояния между двумя направлениями по углу места и азимуту соответственно;
Δε, Δβ - шаг перемещения луча по углу места и азимуту соответственно.
На фиг.1 приведен пример двумерного углового пакета обнаруженных сигналов (обозначен затемненными положениями луча). Для приведенного в примере углового пакета критерий объединения направлений в пакет равен КПАК=1, т.е. в двумерный угловой пакет объединяются только направления (в которых обнаружен сигнал), являющиеся ближайшими к какому-либо направлению пакета.
Наиболее близкое техническое решение имеет следующий недостаток.
В процессе захвата и сопровождения траектории объекта осуществляется экстраполяция положения объекта (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М.: Сов. радио, 1974, с.198, рис.6.1). Вокруг экстраполированного положения объекта предварительно рассчитывается область - строб, в котором с заданной вероятностью будет находиться объект через установленный промежуток времени, равный периоду обращения к объекту. По достижении заданного времени зондируются направления строба в соответствии с заданной последовательностью. Подчеркнем, что в наиболее близком способе зондирования направлений строба продолжаются до тех пор, пока не будут прозондированы все направления строба. При этом в каждое направление строба излучается зондирующий сигнал, принимается отраженный от объекта сигнал, измеряется его амплитуда, которая затем сравнивается с порогом обнаружения, и измеряются координаты направления, в котором произошло обнаружение сигнала, и дальность до объекта. В процессе зондирования направлений строба в соответствии с заданным критерием объединения направлений в пакет формируется двумерный угловой пакет обнаруженных сигналов, по результатам анализа которого известными методами определяются угловые координаты объекта.
Однако если за время экстраполяции параметры движения сопровождаемого объекта изменились (объект совершил маневр), то истинное положение объекта и центр предварительно рассчитанного строба будут отличаться. В этом случае часть направлений, в которых мог быть обнаружен отраженный от объекта сигнал, т.е. часть углового пакета, оказывается вне строба (фиг.1). А поскольку направления вне строба не зондируются, то сформированный в стробе двумерный угловой пакет будет не полным и не симметричным относительно истинного положения объекта. Угловые координаты объекта на основании анализа такого пакета, как известно, определяются с ошибками. В результате экстраполяция положения объекта на время следующего обращения к нему будет произведена с еще большими ошибками, что приведет к неустойчивому сопровождению траектории объекта и, в конечном счете, к срыву траектории с сопровождения.
Таким образом, недостатком наиболее близкого способа является низкая точность измерения угловых координат объекта в процессе захвата и сопровождения траектории в стробах.
Заявляемое изобретение направлено на устранение указанного недостатка. Решаемой задачей (техническим результатом), таким образом, является увеличение точности измерения угловых координат объекта в процессе захвата и сопровождения траектории в стробах.
Указанный технический результат достигается тем, что в способе измерения угловых координат объекта в процессе захвата и сопровождения траектории в стробах, включающем зондирование направлений строба, формирование двумерного углового пакета обнаруженных сигналов в соответствии заданным критерием объединения направлений в угловой пакет, вычисление угловых координат объекта, согласно изобретению зондирование направлений строба производят до тех пор, пока не будет найдено направление, в котором произошло обнаружение сигнала, после чего осуществляют зондирование направлений в окрестности упомянутого направления, включая направления вне границ строба, если они попадают в упомянутую окрестность, формирование двумерного углового пакета обнаруженных сигналов осуществляют по мере зондирования направлений из упомянутой окрестности, применяя к каждому из них заданный критерий объединения направлений в угловой пакет, по окончании формирования двумерного углового пакета обнаруженных сигналов осуществляют вычисление угловых координат объекта.
Указанный технический результат достигается также тем, что:
- зондирование направлений строба начинают с центрального направления строба, затем зондируют направления, ближайшие к центральному, затем - направления, отстоящие через одно направление от центрального, и т.д.;
- в качестве окрестности направления, в котором произошло обнаружение сигнала, выбирают множество направлений, лежащих на прямой линии, параллельной одной из осей координат и проходящей через упомянутое направление, при этом первую угловую координату объекта определяют из углового пакета, сформированного по упомянутому множеству направлений, а вторую угловую координату объекта определяют из углового пакета, сформированного по множеству направлений, лежащих на прямой линии, параллельной другой оси координат, и проходящей через направление первого углового пакета, соответствующее первой угловой координате объекта;
- в качестве критерия объединения направлений в угловой пакет используют угловое расстояние КПАК между данным направлением и ближайшим к нему направлением в пакете, при этом направление включают в угловой пакет, если выполняется условие:
где Δε, Δβ - угловые расстояния между двумя направлениями по углу места и азимуту соответственно;
Δε, Δβ - шаг перемещения луча по углу места и азимуту соответственно.
Суть заявляемого технического решения заключается в следующем. Известно, что в процессе захвата и сопровождения траектории объекта координаты центров стробов всегда определяются с ошибками. Причинами этих ошибок является различные факторы, из которых основные - погрешности в измерении параметров движения объекта, на основании которых производится экстраполяция его положения, и непредвиденный маневр объекта за время экстраполяции. В результате действительное положение объекта, как правило, не совпадает с центром строба.
Известно также, что обнаружение объекта, находящегося ближе некоторой дальности, происходит одновременно в нескольких угловых направлениях, т.е. по объекту формируется двумерный угловой пакет обнаруженных сигналов. Размеры углового пакета могут быть достаточно большими. Так, например, известно, что в обзорных РЛС средней дальности для шага перемещения луча антенны, равного 0.5 ширины луча по уровню половинной мощности, при обнаружении крупных летательных аппаратов сложной формы двумерный угловой пакет обнаруженных сигналов может достигать 25 направлений. На фиг.1 приведен пример двумерного углового пакета обнаруженных сигналов, состоящего из 3 направлений.
Если сопровождаемый объект за время экстраполяции совершает интенсивный непредвиденный маневр, то может оказаться, что часть направлений, в которых мог быть обнаружен отраженный от объекта сигнал, оказывается вне строба, положение которого было рассчитано по данным, полученным в условиях отсутствия маневра. В этом случае двумерный угловой пакет, сформированный в стробе, оказывается не полным и не симметричным относительно истинного положения объекта (фиг.1). Координаты объекта по такому угловому пакету определяются с ошибками. При достаточно интенсивном маневре объекта ошибки определения его угловых координат в стробе могут оказаться столь значительными, что при последующей экстраполяции объект не будет накрыт стробом, и его траектория будет сорвана.
В заявляемом техническом решении в границах строба производится поиск только одного направления, в котором обнаруживается сигнал. После того, как указанное направление найдено, порядок зондирования направлений изменяется. Теперь, начиная с направлений, ближайших к найденному, и последовательно переходя к другим, осуществляются зондирования направлений и формирование (по заданному критерию) двумерного углового пакета обнаруженных сигналов. При этом границы строба во внимание не принимаются.
Как уже отмечалось, критерием для включения направления, в котором произошло обнаружение сигнала, в существующий угловой пакет является его расстояние КПАК по угловым координатам к ближайшему к нему направлению пакета. (Вначале в качестве существующего углового пакета принимается угловой пакет, состоящий из одного направления - направления, котором произошло обнаружение сигнала при осмотре строба). При этом проверяется условие (1).
Порядок измерения угловых координат объекта в стробе в заявляемом способе следующий.
Начинают осматривать строб в соответствии с заданной последовательностью, например, вначале осматривают центральное направление строба, затем - направления строба, ближайшие к центральному, затем - направления, отстоящие через одно направление от центрального, и т.д. Как только в некотором направлении строба произошло обнаружение сигнала, то далее последовательно зондируются направления в окрестности этого направления. Так, при критерии объединения направлений в пакет равном КПАК=1, зондирование начинают с направлений, ближайших к указанному. По мере зондирования направлений к каждому из них применяется заданный критерий объединения направлений в пакет, при выполнении которого направление включается в пакет. Затем зондируются направления, ближайшие к направлениям, вновь включенным в пакет, и т.д.
Если направлениями, подлежащими зондированию, оказываются направления вне границ строба, то зондируются и включаются в пакет при выполнении заданного критерия и они.
Формирование двумерного углового пакета заканчивается, когда во всех направлениях, которые могли быть включены в пакет в соответствии с заданным критерием, не произошло обнаружение сигнала. Сформированный таким образом двумерный угловой пакет обнаруженных сигналов является полным, а следовательно, и симметричным относительно положения объекта.
По окончании формирования двумерного углового пакета осуществляется вычисление угловых координат объекта.
Оптимальные методы определения угловых координат объекта известны. Они основаны на измерении характеристик углового пакета (например, Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М.: Сов. радио, 1974, с.43-47; Самсоненко С.В. Цифровые методы оптимальной обработки радиолокационных сигналов, Военное издательство Министерства обороны СССР, - М., 1968, стр.244-258; Кисляков В.И., Лужных С.Н., Прудников С.Я. «Измерение угловых координат объекта одноканальной импульсной РЛС по угловому пакету произвольных размеров». Радиопромышленность, 2005, вып.1, с.83).
Угловые координаты объекта по данным двумерного углового пакета обнаруженных сигналов (на основе метода, приведенного в книге Самсоненко С.В. Цифровые методы оптимальной обработки радиолокационных сигналов, Военное издательство Министерства обороны СССР, - М., 1968 в формулах 7.2.7 на с.247 и 7.2.20 на с.257 соответственно) могут быть определены следующим образом.
Для нефлюктуирующего по амплитуде сигнала оценка угловой координаты  или
или  определяется из уравнения:
определяется из уравнения:
где ρ1, ρ2, ...ρi, ...,ρn - выборочные значения амплитуд сигналов в строке (столбце) двумерного углового пакета, содержащей (содержащем) максимальное по пакету значение сигнала;
I0(.), I1(.) - модифицированная функция Бесселя первого типа нулевого и первого порядка соответственно;
 - весовой коэффициент, соответствующий i-му сигналу в угловом пакете сигналов;
- весовой коэффициент, соответствующий i-му сигналу в угловом пакете сигналов;
А'i - производная от весового коэффициента Аi;
А0 - величина сигнала в направлении максимума ДНА;
Q(.) - функция, определяющая вид нормированной к своему максимуму ДНА по измеряемой координате;
σ - среднеквадратическое значение шума;
θi - известное положение максимума ДНА в момент приема i-го импульса углового пакета;
 или
или 
Для флюктуирующего по амплитуде сигнала оценка угловой координаты объекта  или
или  определяется из уравнения:
определяется из уравнения:

где  - отношение сигнал/шум i-го сигнала в угловом пакете сигналов;
- отношение сигнал/шум i-го сигнала в угловом пакете сигналов;
k'i - производная от отношения ki;
 - максимальное значение сигнал/шум в угловом пакете сигналов, соответствующее максимуму ДНА;
- максимальное значение сигнал/шум в угловом пакете сигналов, соответствующее максимуму ДНА;
σо - максимальное значение среднеквадратического изменения отраженного сигнала;
 или
или 
Таким образом, в заявляемом способе для получения полного двумерного углового пакета обнаруженных сигналов достаточно обнаружить в стробе сигнал от объекта в любом направлении пакета. Поскольку угловые координаты объекта, определяемые на основании анализа полного углового пакета, являются наиболее точными, устойчивость захвата и сопровождения траектории значительно увеличивается.
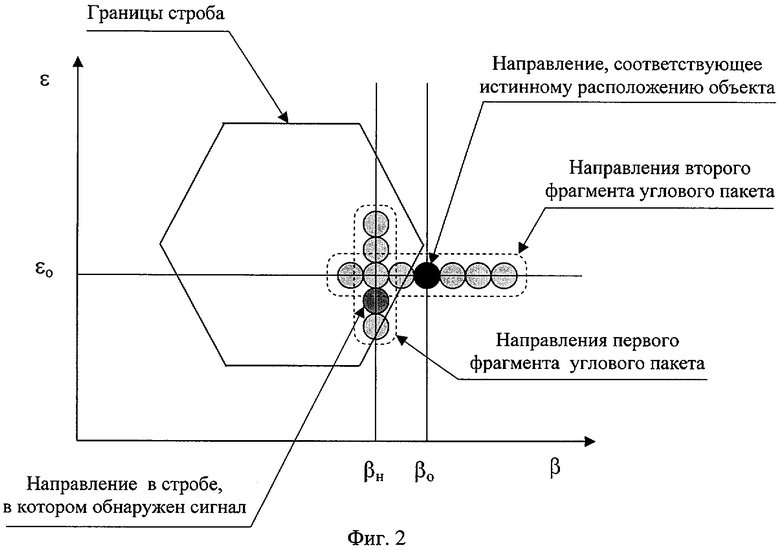
Если заранее известно, что объект образует двумерный угловой пакет достаточно больших размеров, т.е. двумерный угловой пакет объекта заведомо симметричен, то измерение угловых координат может быть существенно упрощено. Так, например, может применяться способ, основанный на заявляемом, в котором анализируется не весь двумерный угловой пакет, а два его взаимно перпендикулярных фрагмента, сформированных из направлений, лежащих на прямых линиях, параллельных координатным осям (фиг.2). В этом варианте условие симметрии фрагментов угловых пакетов относительно истинного положения объекта используется раздельно для каждой координаты объекта.
Порядок измерения угловых координат при этом следующий. После того, как в стробе определено направление, в котором произошло обнаружение сигнала, в его окрестности выбирают множество направлений, лежащих на прямой линии, параллельной одной из осей координат (на фиг.2 - линия с координатой βн, параллельная оси ε), и проходящей через упомянутое направление, при этом первую угловую координату объекта εo определяют из углового пакета, сформированного по упомянутому множеству направлений, а вторую угловую координату объекта βо определяют из углового пакета, сформированного по множеству направлений, лежащих на прямой линии, параллельной другой оси координат (линия с координатой εo параллельная оси β), проходящей через направление первого углового пакета, соответствующее первой угловой координате объекта (координате εо).
Таким образом достигается заявляемый технический результат.
Отметим, что в заявляемом способе, как правило, не зондируются все направления строба. Поэтому в случае сопровождения скоростных маневрирующих объектов, по которым стробы захвата и сопровождения чрезвычайно велики, способ позволяет достичь дополнительного технического результата - значительного сокращения временных и энергетических затрат на осмотр стробов. Для мобильных обзорных РЛС указанный дополнительный технический результат имеет существенное значение, поскольку при ограниченных временных и энергетических ресурсах, свойственных мобильным РЛС, позволяет значительно увеличить пропускную способность РЛС.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - иллюстрирует заявляемый способ; сплошными линиями обозначены границы строба по угловым координатам и направления луча в стробе; пунктирными линиями обозначены направления, зондируемые вне границ строба; затемненные направления луча - направления, в которых произошло обнаружение, эти направления образуют двумерный угловой пакет обнаруженных сигналов.
Фиг.2 - иллюстрирует способ, в котором измерение угловых координат осуществляется по двум пересекающимся фрагментам двумерного углового пакета обнаруженных сигналов.
Фиг.3 - блок-схема обзорной РЛС, реализующей заявляемый способ.
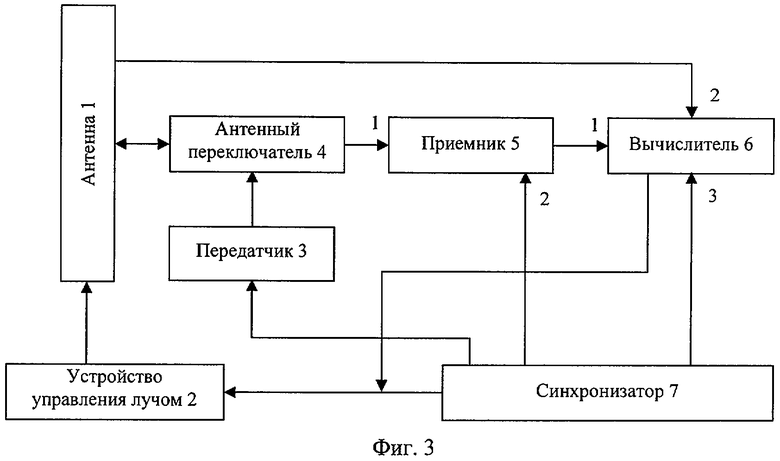
Обзорная радиолокационная станция, реализующая заявляемый способ, содержит (фиг.3) антенну 1, устройство управления лучом 2, выход которого соединен с антенной 1, последовательно соединенные передатчик 3, антенный переключатель 4, приемник 5 и вычислитель 6, а также синхронизатор 7, при этом сигнальный вход/выход антенны 1 соединен со входом/выходом антенного переключателя 4, а координатный ее выход - со вторым входом вычислителя 6, четыре выхода синхронизатора 7 соединены соответственно со входом устройства управления лучом 2, входом передатчика 3, вторым входом приемника 5 и с третьим входом вычислителя 6, выход вычислителя 6 соединен со входом устройства управления лучом 2 (Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки: Введение в теорию: Пер с англ. - М.: Радио и связь, 1986, стр. 19).
Указанная РЛС может быть выполнена на следующих функциональных элементах.
Антенна 1 - ФАР с двумерным электронным сканированием по углу места и азимуту (Справочник по радиолокации. Под ред. М.Сколника, т.2, - М.: Сов. радио, 1977, с.138).
Устройство управления лучом 2 - цифровой вычислитель, реализующий известный алгоритм расчета распределения состояний фазовращателей в полотне ФАР и формирования луча в заданном направлении по углу места (Справочник по радиолокации. Под ред. М. Сколника, т.2, - М.: Сов. радио, 1977, с.141-143).
Передатчик 3 - многокаскадный импульсный передатчик на клистроне (А.М.Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В.Дружинина. Военное издательство, 1967, с.278-279, рис.7.2).
Антенный переключатель 4 - балансный антенный переключатель на базе циркулятора (А.М.Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В.Дружинина. Военное издательство, 1967, с.166-168).
Приемник 5 - супергетеродинный приемник (А.М.Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В.Дружинина. Военное издательство, 1967, с.343-344, рис.8.1).
Вычислитель 6 - цифровой вычислитель. В вычислителе 6 реализуется известный способ захвата и сопровождения траектории объекта (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М.: Сов. радио, 1974, с.285-287), порядок зондирования направлений в стробах и вычисление угловых координат объекта.
Синхронизатор 7 - выполнен на основе задающего генератора и последовательно соединенной с ним цепочки делителей частоты (Радиолокационные устройства (теория и принципы построения). Под ред. В.В.Григорина-Рябова, М.: Сов.радио, 1970, с.602-603).
Рассмотрим работу обзорной РЛС, реализующей заявляемый способ (фиг.3).
По команде от синхронизатора 7 в устройстве управления лучом 2 рассчитывается распределение состояний фазовращателей в полотне антенны 1 и луч антенны 1 устанавливается в заданном направлении зоны обзора РЛС. Сформированный в передатчике 3 высокочастотный зондирующий сигнал через антенный переключатель 4 подается в антенну и излучается. Отраженный от объекта сигнал принимается антенной 1, через антенный переключатель 4 поступает в приемник 5, где преобразуется на видеочастоту, и затем подается в вычислитель 6, где осуществляются операции по обработке поступающей информации при обнаружении сигнала, захвате и сопровождении траектории объекта.
Захват и сопровождение траектории объекта в вычислителе 6 осуществляется с использованием известных алгоритмов (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М.: Сов. радио, 1974, с.284-287). Здесь же определяются координаты и размеры стробов захвата и сопровождения и порядок зондирования направлений. Порядок зондирования направлений следующий: зондирование направлений строба производят до тех пор, пока не будет найдено направление, в котором произошло обнаружение сигнала, после чего осуществляют зондирование направлений в окрестности упомянутого направления, включая направления вне границ строба, если они попадают в упомянутую окрестность, формирование двумерного углового пакета обнаруженных сигналов осуществляют по мере зондирования направлений из упомянутой окрестности, применяя к каждому из них заданный критерий объединения направлений в угловой пакет, по окончании формирования двумерного углового пакета обнаруженных сигналов осуществляют вычисление угловых координат объекта.
В процессе зондирования рассчитанные координаты направлений подаются на вход устройства управления лучом 2, и луч антенны 1 устанавливается в требуемое положение. В результате в соответствии с указанным порядком зондируются все направления, и формируется двумерный угловой пакет обнаруженных сигналов. По окончании формирования углового пакета в вычислителе 6 в соответствии с формулами (2) и (3) вычисляют координаты объекта.
Таким образом, в обзорной РЛС, реализующей заявляемый способ, достигается заявляемый результат - увеличение точности измерения угловых координат объекта в процессе захвата и сопровождения траектории в стробах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА, ОТДЕЛИВШЕГОСЯ ОТ ОБЪЕКТА-НОСИТЕЛЯ | 2007 |
|
RU2345383C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2012 |
|
RU2530547C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2005 |
|
RU2297014C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2470318C1 |
| СПОСОБ РАСПОЗНАВАНИЯ РАДИОЛОКАЦИОННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2317568C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И ОБЗОРНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2292563C2 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2006 |
|
RU2317564C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2358281C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2011 |
|
RU2463622C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА | 2011 |
|
RU2478981C2 |
Изобретение относится к области радиолокации и может быть использовано при сопровождении траекторий объектов в обзорных РЛС с двумерной ФАР с узким лучом по обеим угловым координатам (УК). Техническим результатом является увеличение точности измерения УК объекта в процессе захвата и сопровождения траектории в стробах. Способ измерения УК объекта в процессе захвата и сопровождения траектории в стробах включает зондирование направлений строба, формирование двумерного углового пакета (УП) обнаруженных сигналов в соответствии заданным критерием объединения направлений в УП, вычисление УК объекта, зондирование направлений строба производят до тех пор, пока не будет найдено направление, в котором произошло обнаружение сигнала, после чего осуществляют зондирование направлений в окрестности упомянутого направления, включая направления вне границ строба, если они попадают в упомянутую окрестность, формирование двумерного УП обнаруженных сигналов осуществляют по мере зондирования направлений из упомянутой окрестности, применяя к каждому из них заданный критерий объединения направлений в УП, по окончании формирования двумерного УП обнаруженных сигналов осуществляют вычисление УК объекта. 3 з.п. ф-лы, 3 ил.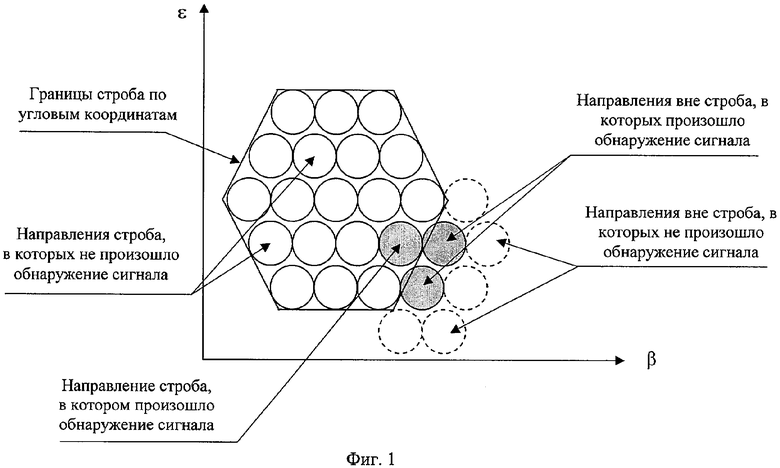
где Δε, Δβ - угловые расстояния между двумя направлениями по углу места и азимуту соответственно;
Δε, Δβ - шаг перемещения луча по углу места и азимуту соответственно.
| КУЗЬМИН С.З | |||
| Основы теории цифровой обработки радиолокационной информации | |||
| - М.: Советское радио, 1974, с.152-155 | |||
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2235342C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТА | 2002 |
|
RU2218581C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ | 1995 |
|
RU2092868C1 |
| US 5166689 A, 24.11.1992 | |||
| US 4806936 A, 21.02.1989 | |||
| СПОСОБ ПОЛУЧЕНИЯ ПРОДУКТА, ИМЕЮЩЕГО КЛЕЯЩИЕ СВОЙСТВА, ИЗ ЗЕРНОВОГО СЫРЬЯ | 1991 |
|
RU2017750C1 |

