Изобретение относится к машиностроению, а именно к промышленным роботам и манипуляторам, предназначенным для автоматизации технологических процессов.
Известен захват промышленного робота, содержащий шарнирно установленные на корпусе захватные рычаги с губками, кинематически связанные со штоком силового цилиндра /например, а.с. СССР 629060, кл. В 25 J 15/00, 1977/, [1].
Однако известный захват не обеспечивает надежность при захвате детали неправильной геометрической формы за счет жесткой кинематической связи.
С целью повышения надежности захват промышленного робота снабжают гибким звеном, в этом захвате на штоке выполнена криволинейная направляющая канавка, в которой расположено гибкое звено, причем концы гибкого звена закреплены на захватных рычагах /а.с. СССР 1060470, БИ 46, 15.12.83 г./, [2].
Недостатком этого захвата является захват предмета жесткими поверхностями, что может привести к повреждению захватываемого предмета, а также отсутствие информации о форме предмета. Это сужает технологические возможности захвата по манипулированию хрупкими предметами сложной формы, положение которых в пространстве точно не задано.
Технический результат - расширение технологических возможностей захвата. Поставленная цель достигается за счет того, что захват содержит гибкое звено, кинематически связанное со штоком силового цилиндра, гибкое звено выполнено в виде множества тросовых элементов, концы которых закреплены на силовом цилиндре привода захвата, пропущенных через каналы, выполненные в опорном элементе и расположенные вдоль штока, причем один из концов тросовых элементов подпружинен и кинематически связан с измерителем его перемещения.
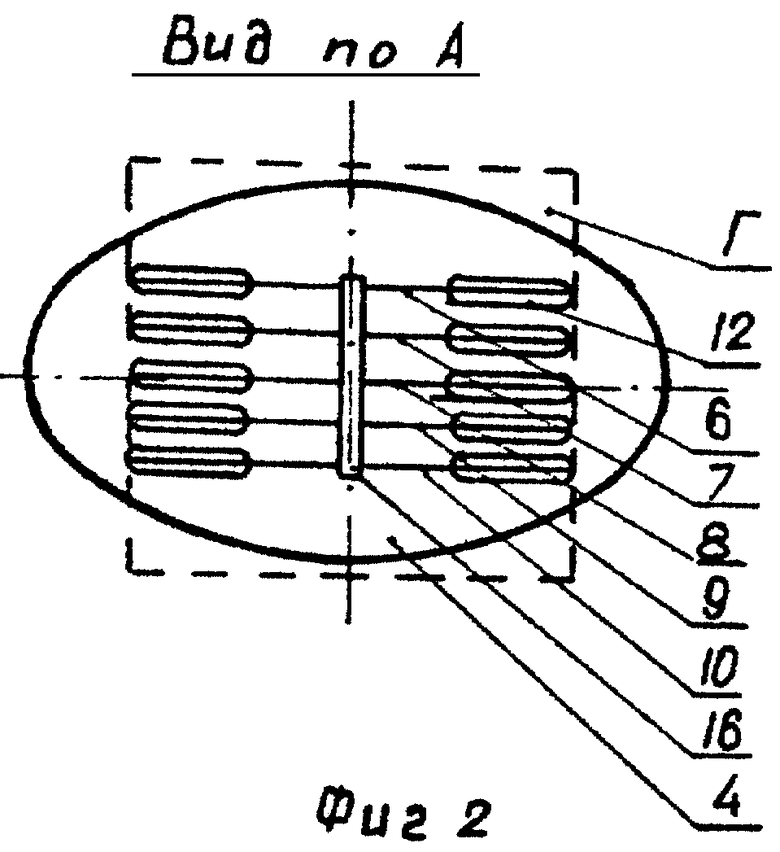
Сущность изобретения поясняется чертежами, где на фиг. 1 схематически изображен механический захват; на фиг. 2 - вид его по стрелке А на фиг 1.
Захват содержит силовой гидравлический цилиндр 1 привода захвата с поршнем 2 и штоком 3, на конце которого смонтирован опорный элемент 4 с закругленной опорной поверхностью 5, захват также содержит гибкое звено, выполненное в виде множества тросовых элементов 6-10, каждый из которых представляет стальной гибкий канатик малого сечения. Конец 11 каждого из тросовых элементов 6-10 закреплен в цилиндре 1. В опорном элементе 4 выполнены каналы 12, расположенные вдоль штока 3 (вдоль его оси Б-Б), через каналы 12 пропущены тросовые элементы 6-10, образующие петлю В. Второй конец 13 каждого из тросовых элементов 6-10 кинематически связан с измерителем перемещения 14 (потенциометром или аналого-цифровым преобразователем) и пружиной 15. Все тросовые элементы 6-10 скреплены между собой тонким резиновым стержнем 16, а измерители перемещения 14 подключены к системе управления манипулятором, составной частью которого является силовой гидравлический цилиндр 1.
Захват работает следующим образом.
Перед захватом предмета Г поршень 2 перемещается ко дну цилиндра 1, устанавливая опорный элемент 4 ближе к цилиндру 1. Тросовые элементы 6-10 за счет упругости приобретают форму петли В.
Резиновый стержень 16 удерживает петли тросовых элементов на заданном расстоянии друг от друга.
Петля В позиционируется вместе с цилиндром 1, поднимается над предметом Г и набрасывается на него таким образом, чтобы предмет Г находился внутри этой петли. Затем поршень 2 выдвигает опорный элемент 4, который предмет Г прижимает к тросовым элементам 6-10. От прижатия тросовые элементы обтягивают обхваченный предмет, облегая его выпуклости по части параметра. В зависимости от конфигурации охваченного профиля предмета Г изменяется удлинение пружин 15 элементов 6-10, определяемые измерителем перемещения 14. Система управления производит анализ этих удлинений, а также их изменение в функции выдвижки штока 3 в функции времени и определяет ориентацию предмета Г при захвате, что позволяет системе управления произвести необходимые манипуляции и позиционирования, учитывая данные по определению положения конфигурации предмета во время захвата. Например, предлагаемое устройство осуществляет захват предмета Г сложной конфигурации - короткого болта, лежащего на головке (вертикально), тогда тросовые элементы 9-10 охватывают его головку, а элементы 6-8 охватывают стержень болта. Через измерители перемещения 14 система управления производит анализ исходной позиции, разворот и позиционирование предмета. Предлагаемое устройство обладает следующими преимуществами по сравнению с известными:
- обеспечивает гибкий охват по большой площади захваченного предмета, что повышает надежность захвата, позволяет манипулировать тяжелыми и хрупкими предметами Г, небольшая площадь контактирования в известном захвате с губками приводит к повреждению хрупких поверхностей тяжелых предметов;
- обеспечивает захват предметов, позиция которых точно не задана. Для захвата при этом требуется, чтобы захватываемый предмет Г находился внутри петли В гибкого захватного элемента, что снижает требования к точности позиционирования устройства для захватывания и упрощает конструкцию захвата;
- обеспечивает захватывание предметов, имеющих периметр от величины, соизмеримой с длиной петли В, до величины, во много раз меньшей. При этом в известном захвате с захватными губками захватывание предмета, например, цилиндрической формы происходит по малым поверхностям контактирования, причем площади контактирования изменяются незначительно при большем изменении диаметра (большом изменении массы), когда необходимо увеличение силы захватывания. В предлагаемом захвате с увеличением диаметра захватываемого предмета увеличивается площадь охвата гибким элементом.
Указанные выше преимущества расширяют технологические возможности предлагаемого захвата по манипулированию предметами сложной конфигурации и различной массы.
Используемые источники
1. А.с. СССР 629060, класс В 25 J 15/00, 1977.
2. А.с. СССР 1060470, БИ 46, 15.12.83 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЧЕСКИЙ СХВАТ | 2003 |
|
RU2257996C1 |
| СПОСОБ ОТБОРА ВОЛОКНА С ПОВЕРХНОСТИ КИП И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2202661C1 |
| КОЛОДОЧНЫЙ ТОРМОЗ | 2000 |
|
RU2188345C2 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ЗУБЧАТЫХ КОЛЕС | 2002 |
|
RU2214585C1 |
| СПОСОБ РЫХЛЕНИЯ КИП И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2194810C1 |
| АВТОМАТИЗИРОВАННОЕ ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2004 |
|
RU2268229C1 |
| СТАБИЛИЗАТОР ПОСТОЯННОГО НАПРЯЖЕНИЯ | 2002 |
|
RU2211477C1 |
| СТАБИЛИЗАТОР НАПРЯЖЕНИЯ | 2002 |
|
RU2208833C1 |
| ДИНАМИЧЕСКОЕ ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО РАДИОСИГНАЛОВ | 2002 |
|
RU2213421C1 |
| ПОВТОРИТЕЛЬ НАПРЯЖЕНИЯ | 2000 |
|
RU2168263C1 |
Изобретение относится к промышленным роботам и манипуляторам, предназначенным для автоматизации технологических процессов. Захват содержит гибкое звено, кинематически связанное со штоком силового цилиндра. Гибкое звено выполнено в виде множества тросовых элементов, пропущенных через каналы, выполненные в опорном элементе и расположенные вдоль штока. Концы тросовых элементов закреплены на силовом цилиндре привода захвата, причем один из концов тросовых элементов подпружинен и кинематически связан с измерителем его перемещения. Изобретение позволит обеспечить гибкий охват по большой площади захваченного предмета, захват предметов, позиция которых не задана, позволяет манипулировать тяжелыми и хрупкими предметами. 2 ил.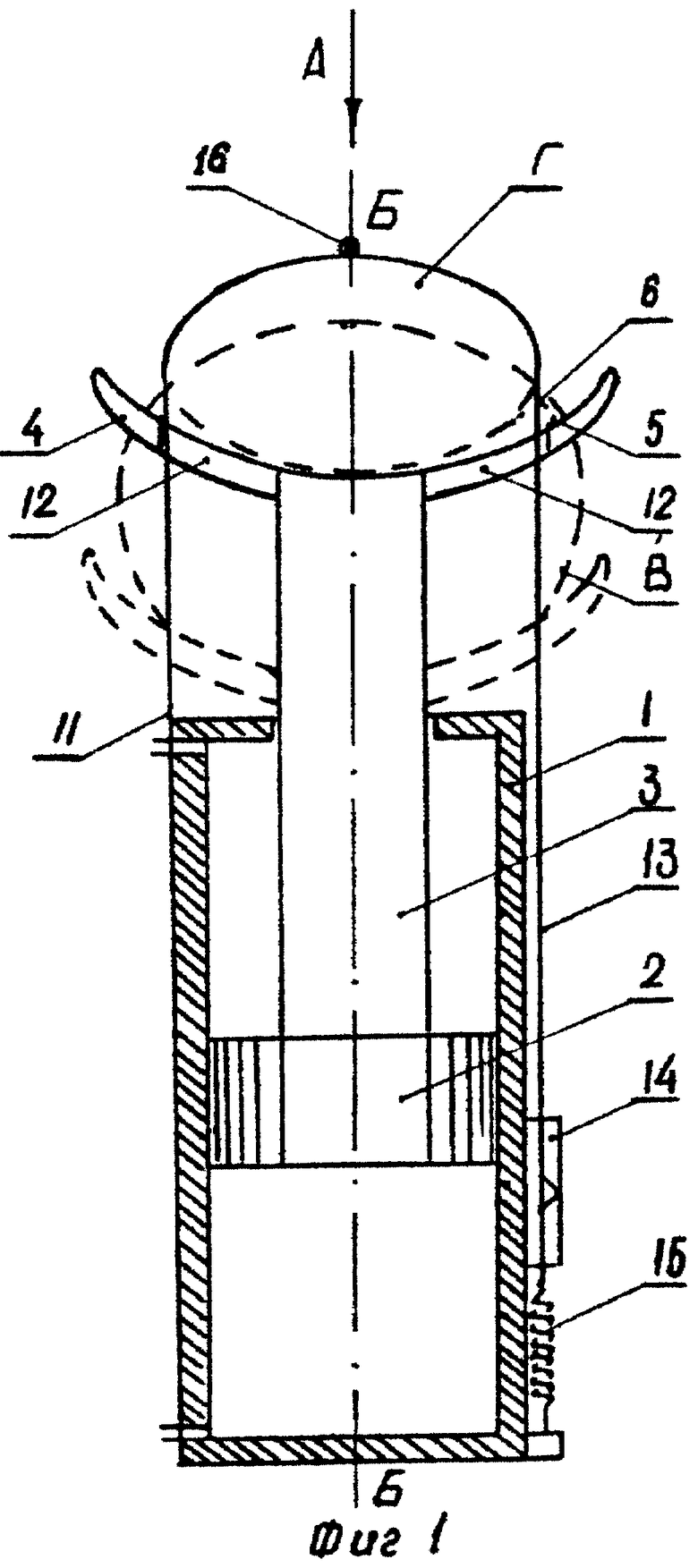
Механический захват, содержащий гибкое звено, кинематически связанное со штоком силового цилиндра, отличающийся тем, что для расширения технологических возможностей его гибкое звено выполнено в виде множества тросовых элементов, концы которых закреплены на силовом цилиндре привода захвата, пропущенных через каналы, выполненные в опорном элементе и расположенные вдоль штока, причем один из концов тросовых элементов подпружинен и кинематически связан с измерителем его перемещения.
| Схват промышленного робота Саблина В.П. | 1982 |
|
SU1060470A1 |
| Захват промышленного робота | 1975 |
|
SU571369A1 |
| Транспортный ротор | 1988 |
|
SU1548125A1 |
| Захватное устройство | 1988 |
|
SU1611731A1 |

