Изобретение относится к машиностроению, а именно к захватным устройствам манипуляторов, и может найти применение в автоматизации технологических процессов.
Известен схват промышленного робота, содержащий шарнирно установленные на корпусе захватные рычаги с губками, кинематически связанные со штоком силового цилиндра [1].
Однако этот схват не обеспечивает надежности при захвате детали неправильной геометрической формы из-за жесткой кинематической связи.
Известны также схваты, в которых для увеличения надежности захвата деталей используется гибкое звено; при этом на штоке силового цилиндра выполнена криволинейная направляющая канавка, в которой расположено гибкое звено, а концы гибкого звена закреплены на захватных рычагах [2]. Такое техническое решение принято нами за прототип.
Недостатком такого схвата является захват предмета жесткими поверхностями, что может привести к повреждениям захватываемого предмета, а также отсутствие информации о величине, месте контактирования захватываемой детали в захватных участках схвата, т.е. информации об ориентации детали в охвате. Это сужает технологические возможности схвата по захвату и манипулированию хрупкими деформируемыми предметами сложной формы.
Целью предлагаемого изобретение является расширение технологических возможностей схвата, а именно обеспечение захвата хрупких деформируемых предметов сложной формы, без повреждения с одновременным получением информации об ориентации этих предметов.
Поставленная цель достигается тем, что гибкое звено своими концами закреплено на концах захватных частей захватных рычагов и проложено вдоль их захватных поверхностей, причем вдоль этих поверхностей в гибкое звено вмонтирован ряд параллельных струнно-образных контактных продольных электродов, на захватных поверхностях смонтированы ответные контактные поперечные электроды, размещенные перекрестно струнно-образным продольным электродом.
Сущность изобретения поясняется чертежами, где:
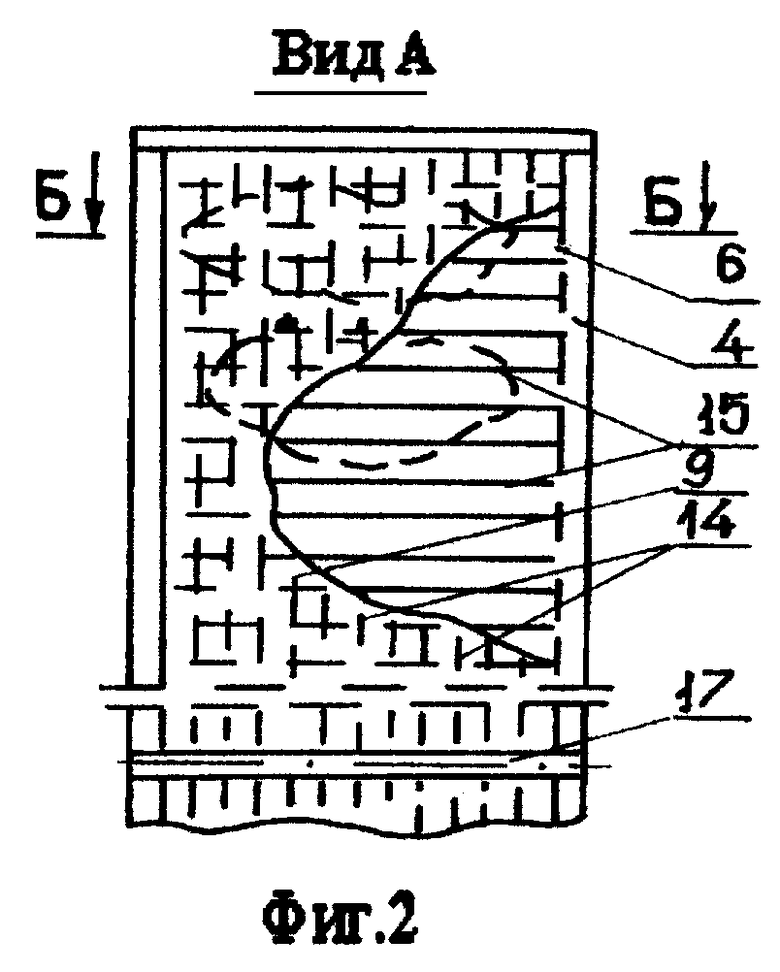
на фиг.1 изображен механический схват;
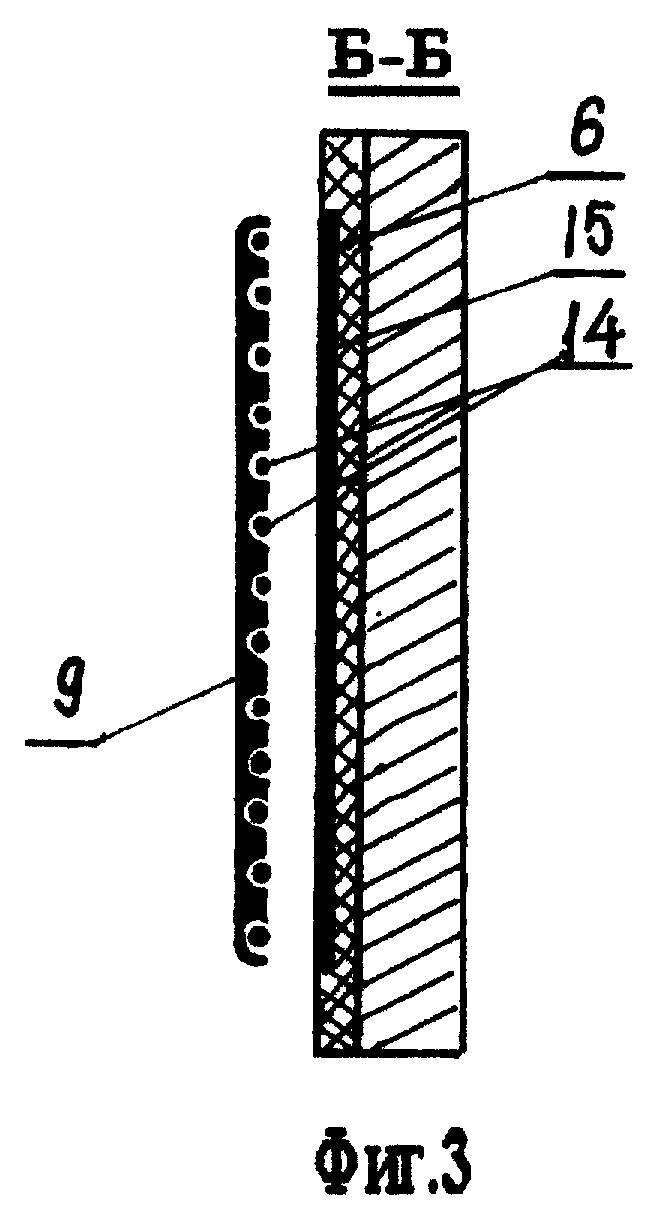
на фиг.2 - вид его по стрелке А на фиг.1;
на фиг.3 - сечения его по Б-Б на фиг.2.
Схват содержит корпус 1, на котором установлены захватные рычаги 2 и 3, каждый из которых содержит захватные участки 4 и тягу 5. На захватной поверхности захватных участков 4 наклеены резиновые полосы 6. Схват содержит также приводной шток 7, на котором смонтирована криволинейная направляющая 8, охватывающая гибкое звено 9. Гибкое звено 9 представляет собой ремень, выполненный из износостойкого мало вытягиваемого материала, гибкое звено 9 своими концами 10 и 11 закреплено на концах 12 и 13 захватных участков 4 захватных рычагов 2 и 3 и проложено вдоль захватных поверхностей - полос 6. Вдоль этих поверхностей в гибкое звено 9 вмонтировано несколько струнно-образных контактных продольных электродов 14 (см фиг.2 и 3), размещенных параллельно друг другу, а на захватных поверхностях - резиновых полосах 6 смонтированы ответные продольным электродам 14 контактные поперечные электроды 15 из электропроводной резины, размещенные перекрестно - под прямым углом к струнно-образным продольным электродам 14. Тяги 5 связаны между собой пружиной 16.
На внутренней нерабочей части рычагов 2 и 3 гибкое звено 9 заведено под направляющий ролик 17, так что при отсутствии захваченного объекта "В" это звено 9 параллельно захватным участкам 4 рычагов 2 и 3.
Контактные электроды, продольные 14 и поперечные 15, образуют чувствительную координатную сенсорную сетку, которые соединены с кабелями передачи информации на стандартные устройства.
Схват работает следующим образом:
В исходном состоянии шток 7 выдвинут так, что захватные рычаги 2 и 3 максимально сжаты пружиной 16, при этом продольные электроды 14 не контактируют с поперечными 15.
При подводе схвата к захватываемому объекту "В", когда этот объект "В" размещается между захватными участками 4 рычагов 2 и 3; шток 7 втягивается (пневмо- или электроприводом), при этом криволинейная направляющая 8 натягивает гибкое звено 9. Под действием этого натяжения рычаги 2 и 3 сближаются и зажимают захватываемыми губками 4 захватываемый объект "В". В местах контакта этого объекта с гибким звеном 9 струнно-образные контактные продольные электроды 14 будут прижаты к поперечным электродам 15, по кабелю будет передана информация о поверхностях или точках контакта с объектом.
При подаче штока 7 вперед - в исходное состояние захваченный объект "В" будет освобожден, а все элементы схвата перейдут в исходное состояние.
Предлагаемый схват обладает рядом преимуществ:
1. За счет того, что гибкое звено 9 своими концами 10 и 11 закреплено на концах 12 и 13 захватных частей захватных рычагов и проложено вдоль их захватных поверхностей, захват объекта "В" происходит путем охвата этого предмета гибким звеном 9, что уменьшает жесткость механического воздействия на предмет, т.е. позволяет работать с мягкими и хрупкими предметами.
2. В связи с тем, что в гибкое звено 9 вмонтирован ряд параллельных струнно-образных контактных продольных электродов 14, а на захватных поверхностях смонтированы ответные контактные поперечные электроды 15, размещенные перекрестно струнно-образным электродам 14, возможно упростить конструкцию датчика контроля координаты и величины контактирования за счет совмещения функции гибкого звена 9 и носителя электродов, а также за счет того, что натяжение звена 9 приводит к автоматическому образованию зазора между электродами 14 и 15, что упрощает систему «схват - датчик контактирования». В известных датчиках для этого требуется введение в конструкцию промежуточных элементов (пружины, дистанционные упругие прокладки и др.), что ведет к усложнению известных датчиков.
Указанные преимущества расширяют технологические возможности предлагаемого схвата, в котором имеются преимущества известного прототипа схвата с гибким звеном 9, обладающего возможностью самоцентрования захватных губок относительно объекта "В".
Источники информации
1. Авторское свидетельство СССР, М. кл. B 25 J 15/00, №629060, 1977 год.
2. Авторское свидетельство СССР, М. кл. B 25 J 15/00, №1060470, Бюллетень №47, 15.12.83.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Схват промышленного робота | 1986 |
|
SU1364472A1 |
| МАНИПУЛЯЦИОННЫЙ МОДУЛЬ ЭКЗОСКЕЛЕТА, ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯЦИОННОГО МОДУЛЯ ЭКЗОСКЕЛЕТА, ПАЛЕЦ ЗАХВАТНОГО УСТРОЙСТВА МАНИПУЛЯЦИОННОГО МОДУЛЯ ЭКЗОСКЕЛЕТА | 2020 |
|
RU2769584C1 |
| Захватное устройство робота | 1987 |
|
SU1423373A1 |
| МЕХАНИЧЕСКИЙ ЗАХВАТ | 2001 |
|
RU2190519C1 |
| Устройство для разборки полых цилиндрических изделий | 1990 |
|
SU1794835A1 |
| УСТРОЙСТВО ДЛЯ РАБОТЫ С РЕЛЬСАМИ НА ЗВЕНОСБОРОЧНО-РАЗБОРОЧНЫХ ЛИНИЯХ | 2010 |
|
RU2451777C1 |
| МЕДИЦИНСКИЙ МАНИПУЛЯТОР | 2008 |
|
RU2445933C2 |
| Схват промышленного робота Саблина В.П. | 1982 |
|
SU1060470A1 |
Изобретение относится к машиностроению, в частности к захватным устройствам манипуляторов, и может найти применение в автоматизации технологических процессов. Сущность изобретения заключается в том, что гибкое звено схвата своими концами закреплено на концах захватных частей рычагов и проложено вдоль их захватных поверхностей. Вдоль указанных поверхностей в гибкое звено вмонтирован ряд параллельных струнообразных контактных продольных электродов. На захватных поверхностях смонтированы ответные контактные поперечные электроды, размещенные перекрестно струнообразным продольным электродам. Технический результат изобретения состоит в расширении технологических возможностей схвата. 3 ил.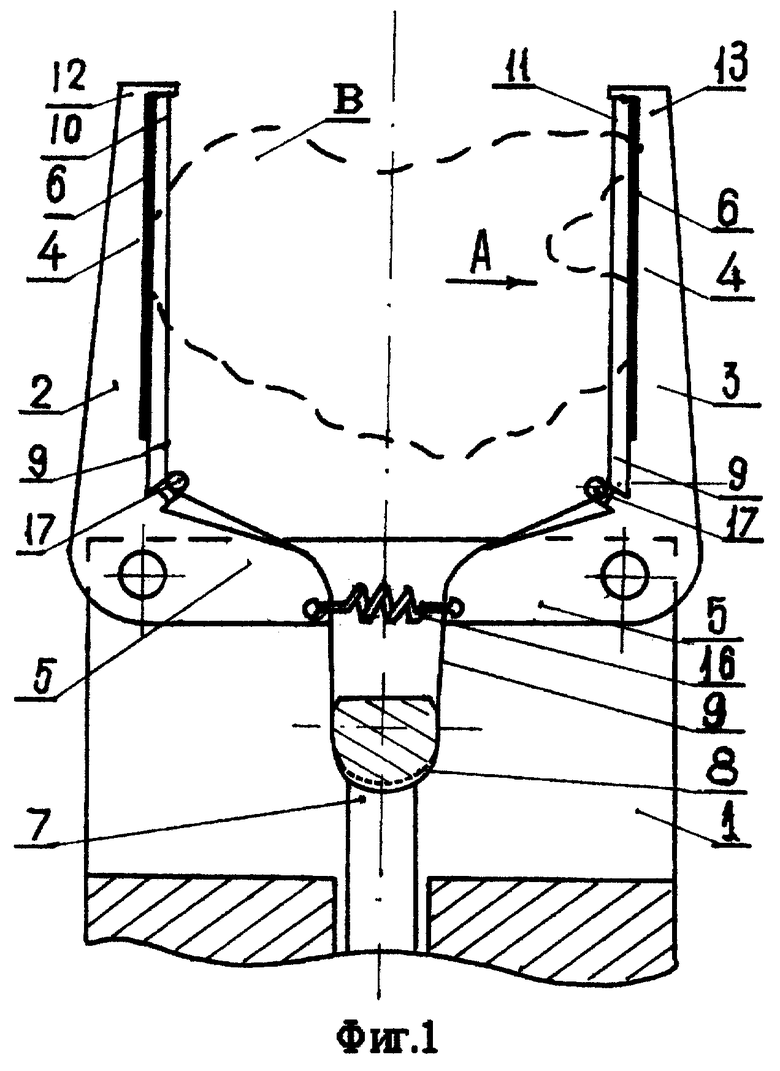
Механический схват, содержащий шарнирно установленные на корпусе захватные рычаги, кинематически связанные со штоком силового цилиндра, шток с криволинейной направляющей канавкой с расположенным в ней гибким звеном, концы которого закреплены на захватных рычагах, отличающийся тем, что гибкое звено своими концами закреплено на концах захватных частей захватных рычагов и проложено вдоль их захватных поверхностей, причем вдоль этих поверхностей в гибкое звено вмонтирован ряд параллельных струнообразных контактных продольных электродов, на захватных поверхностях смонтированы ответные контактные поперечные электроды, размещенные перекрестно струнообразным продольным электродам.
| Схват промышленного робота | 1977 |
|
SU629060A1 |
| Схват промышленного робота | 1983 |
|
SU1122505A1 |
| Схват манипулятора | 1990 |
|
SU1756145A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| DE 3620343 A, 26.03.1987. | |||

