Ч//
i
W
(Л
О 4 Изобретение относится к машиностроению, а именно к промычдленным роботам и манипуляторам, предназна ченным для автоматизации технологи ких процессов, преимущественно в г рячештамповочном производстве. Известен схват промышленного ро та, содержащий шарнирно установлен ные на корпусе захватные рычаги с губками, кинематически связанные со штоком силового цилиндра l . Однако известный схват не обесп чивает надежности при захвате дета ли неправильной геометрической фор мы за счет жесткой кинематической связи. Цель изобретения - повышение надежности. Поставленная цель достигается тем, что схват промышленного робот .содержащий шарнирно установленные на корпусе захватные рычаги с губками, кинематически связанные со (ШТОКОМ силового цилиндра, снабжен гибким звеном, а на штоке выполнена криволинейная направляющая кана ка, в которой расположено гибкое звено, причем концы гибкого звена реплены на захватных рычагах. На чертеже изображено предлагаемое устройство. Схват промышленного робота соде жит корпус 1, на котором шарнирно установлены губки 2 и 3, выполненные в виде двуплечих рычагов, кажд из которЕЛХ содержит рабочую часть и тяги 5. .Схват .содержат также приводной ШТОКб, на котором смонтирована кр олинейная направляющая 7, гибкое звено 8, которое охватывает криволинейную направляющую, а концы его связаны с тягами 5 каждой из губок, причем тяги 5 связаны между собой пружиной растяжения 9. Схват работает следующим образом, В пространстве между рабочими частями 4 губок 2 и 3 располагается обрабатываемая поковка 10 с облоем 11. При позиционировании охвата относительно поковки 10 облой 11 относительной оси схвата расположен на разных расстояниях. Захват поковки с облоем осуществляется перемещением приводного штока 6 в направлении от поковки 10. При этом сначала происходит ориентация губок 2 и 3 относительно облоя поковки за счет проскальзывания гибкого звена 8 относительно криволинейной направляющей 7. При дальнейшем увеличении силы зажима сила трения между направляющей 7 и гибким звеном 8 увеличивается, что и обеспечиваетфиксацию губок относительно оси схвата. Разжим губок происходит за счет пружины растяже|ния 9 при перемещении приводного штока 6 в направлении к поковке. Фрикционная связь гибкого звена G криволинейной направляющей на приводном штоке позволяет отказаться от механизма заклинивания одной из губок, что упрощает конструкцию схвата, а гибкая связь приводного штока с зажимными губками обеспечивает боЛее высокую нагрузочную способность предлагаемого схвата при меньшей металлоемкости. Кроме того, повышается Нс1дежность работы схвата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1984 |
|
SU1225782A2 |
| МЕХАНИЧЕСКИЙ СХВАТ | 2003 |
|
RU2257996C1 |
| Захват | 1981 |
|
SU984862A1 |
| Захват промышленного робота | 1986 |
|
SU1316816A1 |
| Захватное устройство | 1985 |
|
SU1268405A1 |
| Захватное устройство | 1990 |
|
SU1771955A1 |
| Захват промышленного робота | 1981 |
|
SU963852A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Схват промышленного робота | 1989 |
|
SU1770121A1 |
Схват промУшленного робота, содержагдий шарнирно установленные на корпусе захватные рычаги с губками, кинематически связанные со штоком силового цилиндра, отличающийся тем, что, с целью повышения надежности, он снабжен гибким звеном, а на штоке выполнена криволинейная направляющая канавка, в которой расположено гибкое звено, причем концы гибкого звена закреплены на захватных рычагах.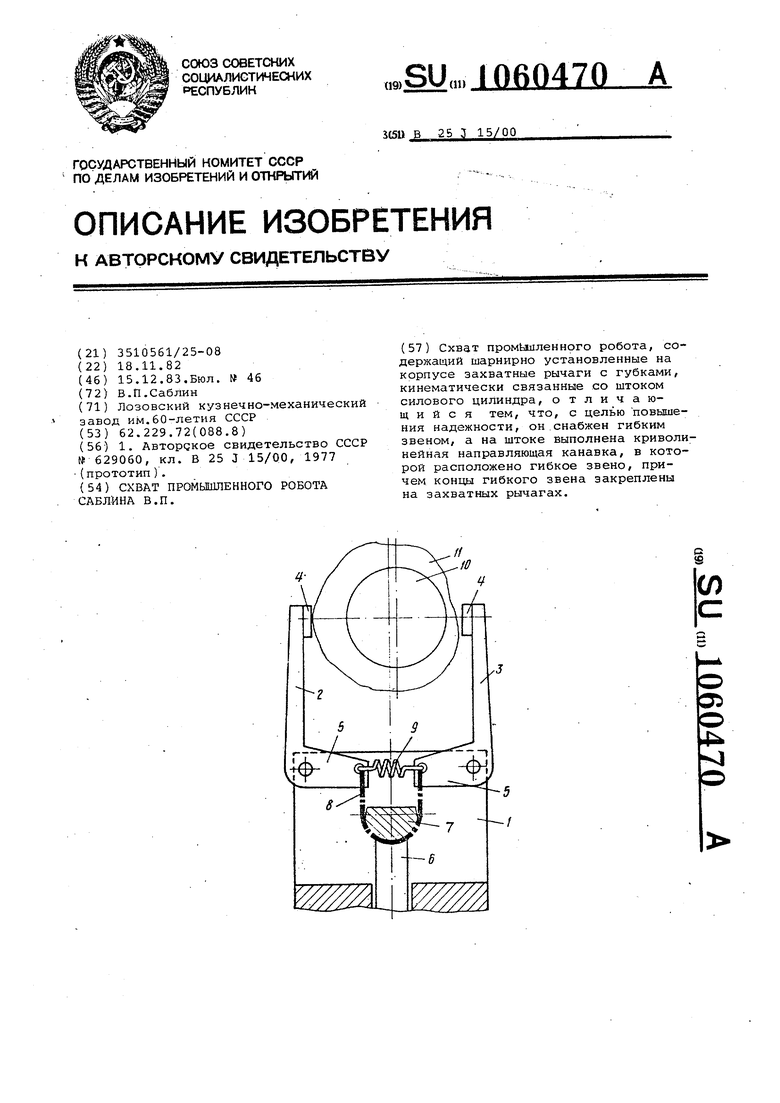
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Схват промышленного робота | 1977 |
|
SU629060A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
