Изобретение относится к грузозахватным устройствам, предназначенным для эксплуатации во всех отраслях промышленности, преимущественно связанных с вредными условиями производства, в частности для грузов, снабженных монтажной скобой.
Грузоподъемные краны нормального исполнения снабжены прикрепленным к подвижной обойме грузового полиспаста грузовым крюком, на который навешивается перемещаемый груз (непосредственно на крюк крана, с помощью навешиваемых на крюк крана гибких стропов или специализированного грузозахватного устройства).
Применение специализированных грузозахватных устройств позволяет значительно повысить производительность и безопасность производства работ. Однако, при этом, специализированные грузозахватные устройства должны быть приспособлены для взаимодействия с грузом, место размещения которого (условия окружающей среды, ограниченность рабочей зоны и т.п.) и параметры (масса, габаритные размеры, конфигурация, жесткость и т.п.) могут быть весьма различными, что обуславливает широкую гамму их конструктивных исполнений, в том числе и по способу управления (ручное или дистанционное управление, а также частично или полностью автоматизированное управление).
В ряде отраслей промышленности, связанных с вредными условиями производства, например в химической при перемещении ядовитых веществ или в атомной при демонтаже элементов устройств с наведенной радиацией (элементы аварийных или выработавших свой ресурс атомных энергетических установок), то есть там, где непосредственное участие человека при обработке груза является нежелательным, применение автоматизированных грузозахватных устройств вообще является предпочтительным.
Автоматизация работы грузозахватных устройств обычно осуществляется путем фиксирования их захватных органов в положениях захвата груза, перемещения с грузом, освобождения груза и перемещения без груза. Как правило, эта фиксация захватных органов автоматизированных грузозахватных устройств осуществляется посредством изменения взаимного положения их отдельных элементов друг относительно друга при последовательном движении крюка крана вверх и вниз.
При этом к автоматизированным грузозахватным устройствам, как правило, предъявляются следующие требования:
- исключение необходимости непосредственного участия человека при обработке груза;
- высокая эксплуатационная надежность, исключающая несанкционированный перевод захватного органа из одного рабочего положения в другое, в том числе за счет высокой надежности фиксации захватного органа в каждом рабочем положении.
Известно грузозахватное устройство (см. Авторское свидетельство СССР №1158477, МКИ В 66 С 1/66, В 66 С 1/12, приоритет от 04.11.82 г.), содержащее корпус с вертикальным пазом, предназначенным для ориентации и размещения монтажной скобы груза, размещенный в корпусе с возможностью перекрытия вертикального паза корпуса путем поперечного, относительно вертикального паза корпуса, поступательного перемещения штыревой захватный орган и механизм перемещения и фиксации, включающий в себя, шарнирно закрепленный в корпусе, Г-образный рычаг, одно плечо которого соединено с тросом дистанционного управления, а другое представляет собой подпружиненный телескопический шток, шарнирно соединенный с штыревым захватным органом. Конструкция механизма перемещения и фиксации обеспечивает фиксацию штыревого захватного органа в открытом и закрытом положениях за счет упругого поджатия телескопического штока механизма управления в его максимально выдвинутом состоянии. Перевод штыревого захватного органа в устройстве в положение захвата груза осуществляется вручную, а его перевод в положение освобождения груза - дистанционно с помощью троса дистанционного управления.
Недостатком этого устройства является недостаточность его технических возможностей для обработки грузов в условиях вредных производств, связанная с необходимостью непосредственного участия человека при обработке груза, в частности для осуществления управления положением запорного органа.
Недостатком этого устройства является также его недостаточно высокая эксплуатационная надежность, связанная с необходимостью передачи по тросу дистанционного управления управляющего воздействия на его открытие по направлению и точке приложения, не совпадающими с осью подвеса груза.
Известен строп для подъема груза (см. Авторское свидетельство СССР №703469, МКИ В 66 С 1/36, приоритет от 18.12.74 г.), содержащий корпус с вертикальным пазом, предназначенным для ориентации и размещения монтажной скобы груза, размещенный в корпусе с возможностью перекрытия вертикального паза корпуса путем поперечного, относительно вертикального паза корпуса, поступательного перемещения, упруго (через пружину растяжения) связанный с тросом дистанционного управления, подпружиненный штыревой захватный орган. Штыревой захватный орган со стороны размещения троса дистанционного управления вблизи торца снабжен кольцевой канавкой. В корпусе также размещен механизм фиксации, включающий в себя шарнирно закрепленный в корпусе, подпружиненный двуплечий рычаг, одно плечо которого снабжено двумя выступами, один из которых взаимодействует с кольцевой канавкой штыревого захватного органа в его открытом положении, а другой - с торцом штыревого захватного органа в его закрытом положении. Другое плечо двуплечего рычага механизма фиксации также снабжено выступом, взаимодействующим с выступом закрепленного в корпусе с возможностью поворота под воздействием троса дистанционного управления кулачка механизма фиксации. Конструкция механизма фиксации обеспечивает фиксацию штыревого захватного органа в открытом и закрытом положениях за счет его жесткого упора (зацепа) в выступы двуплечего рычага. Перевод штыревого захватного органа в устройстве в положение захвата и освобождение груза осуществляется вручную дистанционно путем поочередного натяжения троса дистанционного управления.
Недостатком этого устройства является недостаточность его технических возможностей для обработки грузов в условиях вредных производств, связанная с необходимостью непосредственного участия человека при обработке груза, в частности для осуществления управления положением запорного органа.
Недостатком этого устройства является также его недостаточно высокая эксплуатационная надежность, связанная с необходимостью передачи по тросу дистанционного управления управляющего воздействия на его открытие (или на его открытие и закрытие) по направлению и точке приложения, не совпадающими с осью подвеса груза.
Наиболее близким по технической сути, принятым за прототип, является автоматизированное грузозахватное устройство (см. Проектирование нестандартного оборудования. Тяжелое и атомное машиностроение. Монография./ Под ред. П.Д. Кравченко, Шахты, ЮРГУЭС, 2001 г., стр. 243...244), содержащее корпус с вертикальным пазом, предназначенным для ориентации и размещения монтажной скобы груза, размещенные в корпусе с возможностью перекрытия вертикального паза корпуса путем поперечного, относительно него, поступательного перемещения, подпружиненные штыревые захватный и управляющий органы и взаимодействующий с ними, а также непосредственно с поверхностью самого груза, размещенный в корпусе с возможностью продольного, относительно вертикального паза корпуса, поступательного перемещения отводящий клин, силовое замыкание которого с взаимодействующими с ним штыревыми захватным и управляющим органами обеспечивается действием собственного веса отводящего клина или пружиной. При этом штыревой захватный орган снабжен наклонными поверхностями для взаимодействия с отводящим клином и для взаимодействия с монтажной скобой груза при ее захвате, а штыревой управляющий орган снабжен пазом для взаимодействия с отводящим клином и наклонными поверхностями для взаимодействия с монтажной скобой груза при ее захвате и освобождении, отводящий же клин снабжен наклонной поверхностью для взаимодействия с штыревым захватным органом, вырезом для взаимодействия с пазом штыревого управляющего органа и выступающим из корпуса, контактирующим с поверхностью самого груза при его освобождении хвостовиком.
Недостатком этого устройства является недостаточность его технических возможностей для обработки грузов, связанная с тем, что для осуществления управления положением запорного органа длина монтажной скобы груза должна иметь строго ограниченные размеры и, кроме того, сама форма поверхности груза в зоне его контакта с хвостовиком отводящего клина должна обеспечивать возможность этого контакта.
Недостатком этого устройства является также его недостаточно высокая эксплуатационная надежность, связанная с конструктивной особенностью размещения отводящего клина, а именно с тем, что отводящий клин, а следовательно, и точка его контакта с грузом смещены относительно оси подвеса груза, что вызывает появление снижающего надежность перевода штыревого запорного органа в открытое положение и его фиксации в этом положении, опрокидывающего момента, воздействующего на само устройство в момент освобождения груза и, кроме того, не исключает возможности взаимодействия хвостовика отводящего клина с грузом при его раскачивании относительно точки контакта монтажной скобы груза и штыревого захватного органа.
Таким образом, основными недостатками указанных устройств, ограничивающими их технические возможности и снижающими их эксплуатационную надежность, являются недостаточность их технических возможностей для обработки грузов в условиях вредных производств, связанная с необходимостью непосредственного участия человека при обработке груза, в том числе из-за наличия ограничивающих требований к форме и размерам монтажной скобы и самого груза, и то, что управляющее воздействие на открытие (или на их открытие и закрытие) этих устройств по направлению и точке приложения смещено относительно оси подвеса груза.
Целью настоящего изобретения является расширение технических возможностей и повышение эксплуатационной надежности автоматизированных грузозахватных устройств путем обеспечения взаимодействия их элементов при эксплуатации только с монтажной скобой груза по направлению и точке приложения, максимально совпадающими с осью подвеса груза.
Указанная цель достигается тем, что в автоматизированных грузозахватных устройствах, содержащих корпус с вертикальным пазом, предназначенным для ориентации и размещения монтажной скобы груза, размещенные в корпусе с возможностью перекрытия вертикального паза корпуса путем поперечного, относительно него, поступательного перемещения, подпружиненные штыревые захватный и управляющий органы и взаимодействующий с ними размещенный в корпусе с возможностью продольного, относительно вертикального паза корпуса, поступательного перемещения отводящий клин, отводящий клин снабжен зацепом, перекрывающим вертикальный паз корпуса над штыревым захватным органом.
Предлагаемое техническое решение расширяет технические возможности автоматизированных грузозахватных устройств и повышает их эксплуатационную надежность, так как длина монтажной скобы груза ограничена только снизу длиной рабочего хода устройства и исключает любые ограничения по форме груза и, кроме того, так как обеспечивает взаимодействие их элементов при эксплуатации только с монтажной скобой груза по направлению и точке приложения, максимально совпадающими с осью подвеса груза.
На Фиг.1 изображен общий вид предлагаемого автоматизированного грузозахватного устройства в исходном состоянии.
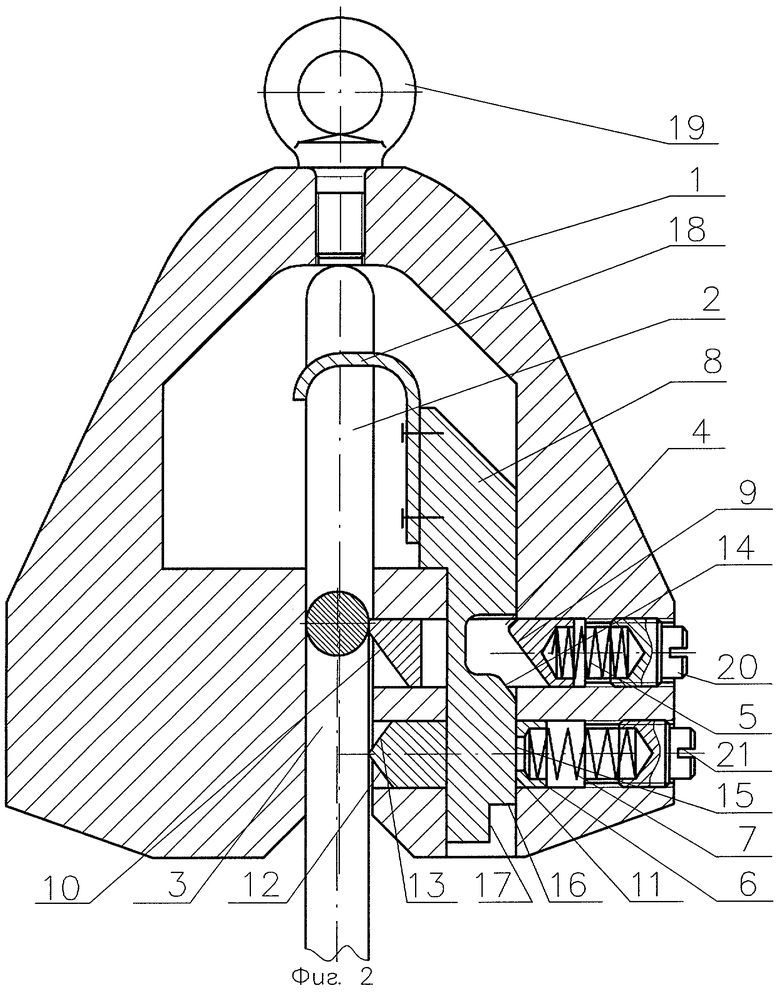
На Фиг.2 - то же, в момент отвода штыревого захватного органа.
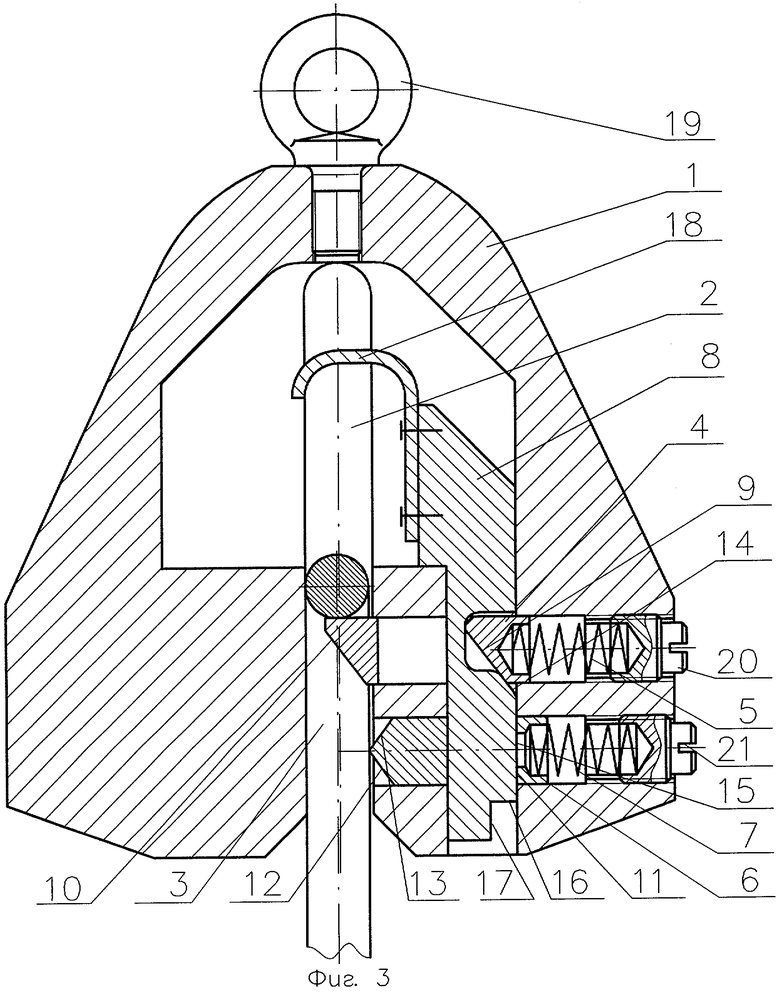
На Фиг.3 - то же, в момент захвата монтажной скобы груза.
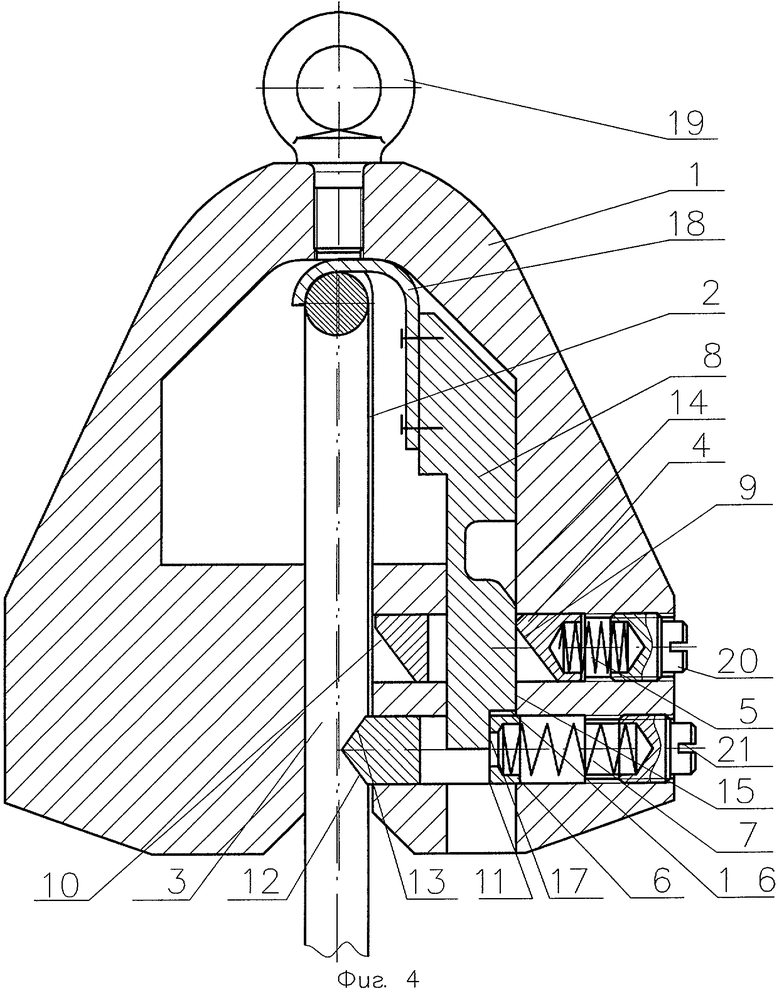
На Фиг.4 - то же, в момент фиксации открытого состояния.
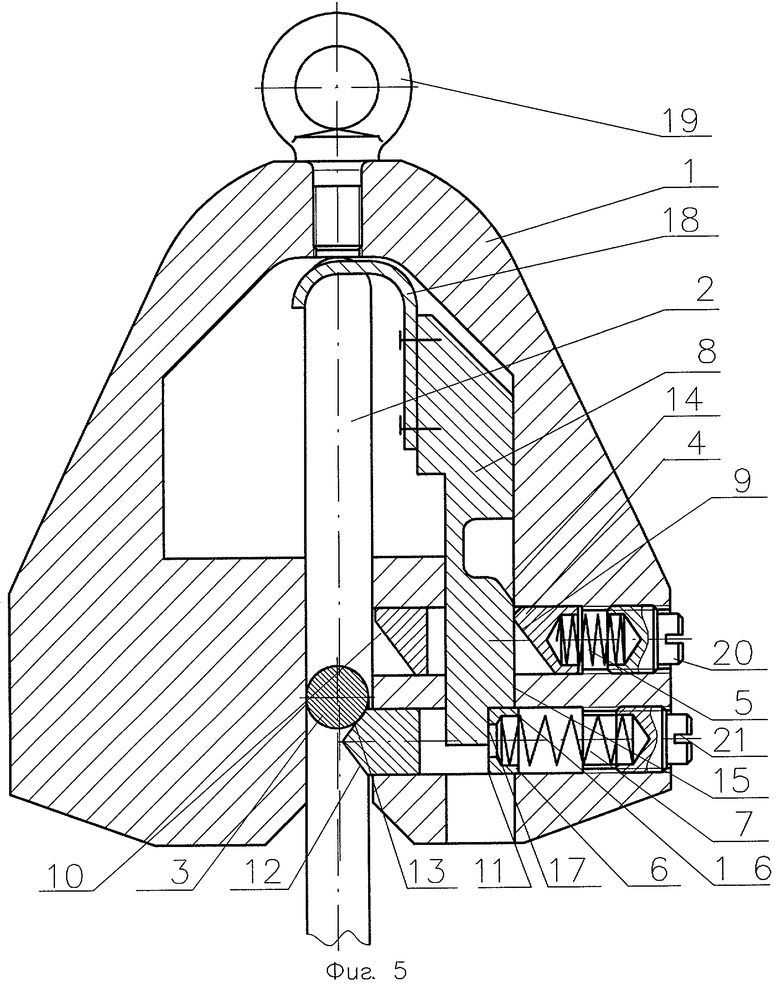
На Фиг.5 - то же, в момент выхода монтажной петли груза (переход в исходное состояние).
Автоматизированное грузозахватное устройство состоит (см. Фиг.1) из корпуса 1 с вертикальным пазом 2, предназначенным для ориентации и размещения монтажной скобы 3 груза (не показан). В корпусе 1 размещены с возможностью перекрытия вертикального паза 2 путем поперечного, относительно него, поступательного перемещения штыревой захватный орган 4 с пружиной 5 и штыревой управляющий орган 6 с пружиной 7. В корпусе 1 также размещен с возможностью продольного, относительно вертикального паза 2, поступательного перемещения отводящий клин 8, силовое замыкание которого с взаимодействующими с ним штыревым захватным органом 4 и штыревым управляющим органом 6 обеспечивается действием собственного веса отводящего клина 8 или пружиной (не показана). Штыревой захватный орган 4 выполнен с наклонной поверхностью 9 для взаимодействия с отводящим клином 8 и с наклонной поверхностью 10 для взаимодействия с монтажной скобой 3 при ее захвате. Штыревой управляющий орган 6 снабжен пазом, задняя стенка 11 которого взаимодействует с отводящим клином 8, наклонной поверхностью 12 для взаимодействия с монтажной скобой 3 при ее захвате и наклонной поверхностью 13 для взаимодействия с монтажной скобой 3 при ее освобождении. Отводящий клин 8 выполнен с наклонной поверхностью 14 и задней кромкой 15 для взаимодействия с наклонной поверхностью 9 штыревого захватного органа 4, с вырезом 16 и задней кромкой 17 этого выреза для взаимодействия с задней стенкой 11 паза штыревого управляющего органа 6 и с зацепом 18, перекрывающим вертикальный паз 2 над штыревым захватным органом 4. Задняя кромка 15 отводящего клина 8 взаимодействует также с задней стенкой 11 паза штыревого управляющего органа. Смещение центра тяжести всего устройства вниз и его размещение на оси подвеса груза, обеспечивающее максимальную устойчивость устройства при взаимодействии с монтажной скобой 3, осуществляется формой корпуса 1 (см. графику чертежа) или вставками (не показаны). Навешивание устройства на грузовой крюк (не показан) крана (не показан) осуществляется за рым-болт 19. Регулировка усилия поджатия пружин 5 и 7 осуществляется пробками 20 и 21.
Автоматизированное грузозахватное устройство работает следующим образом.
Подвешенное на грузовой крюк (не показан) крана (не показан) автоматизированное грузозахватное устройство в исходном состоянии (см. Фиг.1) опускают на монтажную скобу 3 груза (не показан), которая заводится в вертикальный паз 2 корпуса 1. При дальнейшем опускании устройства (см. Фиг.2) монтажная скоба 3 упирается в наклонную поверхность 10 штыревого захватного органа 4, скользит по ней и перемещает штыревой захватный орган 4, сжимая пружину 5 и освобождая дальнейший проход монтажной скобы 3 по вертикальному пазу 2. После прохода монтажной скобы 3 (см. Фиг.3) пружина 5 перемещает штыревой захватный орган 4 в исходное положение, перекрывая вертикальный паз 2. Устройство поднимают. При этом штыревой захватный орган 4 подхватывает монтажную скобу 3 и увлекает за собой груз (не показан). Груз (не показан) поднимают, переносят в необходимую точку и опускают на какую-то поверхность. Продолжают опускать устройство. Монтажная скоба 3, оставаясь на месте, вступает во взаимодействие с зацепом 18 отводящего клина 8. Отводящий клин 8 останавливается, а все остальные элементы устройства продолжают опускаться. Наклонная поверхность 14 отводящего клина 8 взаимодействует с наклонной поверхностью 9 штыревого захватного органа 4, скользит по ней и перемещает штыревой захватный орган 4, сжимая пружину 5 и открывает вертикальный паз 2. Наклонная поверхность 9 штыревого захватного органа 4 переходит на заднюю кромку 15 отводящего клина 8 и скользит по ней. Одновременно с этим задняя стенка 11 паза штыревого управляющего органа 6 скользит по задней кромке 15 отводящего клина 8. Силовое поджатие задней стенки 11 паза штыревого управляющего органа 6 к задней кромке 15 отводящего клина 8 осуществляется пружиной 7. При дальнейшем опускании устройства задняя стенка 11 паза штыревого управляющего органа 6 попадает в вырез 16 отводящего клина 8. Штыревой управляющий орган 6 под воздействием пружины 7 перемещается, перекрывая своим концом с наклонной плоскостью 13 вертикальный паз 2. Задняя стенка 11 паза штыревого управляющего органа 6, при этом, упирается в заднюю кромку 17 отводящего клина 8, ограничивая этим перемещение штыревого управляющего органа 6. При дальнейшем опускании устройства верхний конец паза 2 (вся верхняя часть устройства с рым-болтом 19) упирается в зацеп 18 и устройство останавливается (см. Фиг.4). Поднимают устройство. Отводящий клин 8 своим зацепом 18 в первый момент под действием своего веса или посредством пружины (не показана) остается на месте в контакте с монтажной скобой 3, однако, затем задняя стенка 11 паза штыревого управляющего органа 6 упирается в вырез 16 отводящего клина 8 и обеспечивает этим подъем отводящего клина 8 вместе со всеми остальными элементами устройства. Оставшаяся на месте монтажная скоба 3 (см. Фиг.5) упирается в наклонную поверхность 13 штыревого управляющего органа 6, скользит по ней и перемещает штыревой управляющий орган 6, сжимая пружину 7 и освобождая вырез 16 отводящего клина 8 от контакта с задней стенкой 11 штыревого управляющего органа 6. Отводящий клин 8 под действием своего веса или посредством пружины (не показана) опускается. Его задняя кромка 15 вступает в контакт с задней стенкой штыревого управляющего органа 6, а наклонная плоскость 9 штыревого захватного органа 4 наоборот, выходит из контакта с задней кромкой 15 отводящего клина 8 и вступает в контакт с его наклонной плоскостью 14. При этом под действием пружины 5 штыревой захватный орган 4 перемещается, перекрывая паз 3. Устройство вернулось в исходное состояние и вышло из контакта с монтажной петлей 3.
Авторами изготовлен макетный образец предлагаемого автоматизированного грузозахватного устройства, показавший хорошие результаты при проведении макетных испытаний, который, при необходимости, может быть представлен экспертизе.
Библиографические сведения
1. Авторское свидетельство СССР №1158477 (МКИ В 66 С 1/66; В 66 С 1/12), приоритет от 04.11.82 г.
2. Авторское свидетельство СССР №703469 (МКИ В 66 С 1/36), приоритет от 18.12.74 г.
3. Проектирование нестандартного оборудования. Тяжелое и атомное машиностроение. Монография./ Под ред. П.Д. Кравченко, Шахты, ЮРГУЭС, 2001 г., стр. 243...244.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный дистанционно управляемый подъемный крюк | 2023 |
|
RU2809751C1 |
| Грузозахватное устройство В.К.Петрова | 1980 |
|
SU950654A1 |
| ПОДВЕСНОЙ АВТОМАТИЧЕСКИЙ ЗАХВАТНО-ЗАЖИМНОЙ ЛОВИТЕЛЬ | 2011 |
|
RU2474529C2 |
| Грузозахватное устройство | 1990 |
|
SU1744033A1 |
| Грузозахватное устройство | 1984 |
|
SU1196329A1 |
| Захват для грузов с отверстиями | 1990 |
|
SU1770253A1 |
| Грузозахватное устройство | 1987 |
|
SU1472409A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ ПЛИТЫ | 2011 |
|
RU2467944C1 |
| ШТЫРЬЕВОЙ ЗАМОК ГРУЗОЗАХВАТНОГО УСТРОЙСТВА | 1991 |
|
RU2013345C1 |
| Устройство для загрузки-выгрузки шахтных печей | 1978 |
|
SU789670A1 |
Изобретение относится к грузозахватным устройствам, предназначенным для эксплуатации во всех отраслях промышленности, преимущественно связанных с вредными условиями производства. Автоматизированное грузозахватное устройство содержит корпус с вертикальным пазом, подпружиненные штыревые захватный и управляющий органы и взаимодействующий с ними размещенный в корпусе отводящий клин. При этом штыревой захватный орган выполнен с наклонной поверхностью для взаимодействия с монтажной скобой груза при ее захвате, а штыревой управляющий орган выполнен с наклонной поверхностью для взаимодействия с монтажной скобой при ее захвате и наклонной поверхностью для взаимодействия с монтажной скобой при ее освобождении, а отводящий клин выполнен с наклонной поверхностью и задней кромкой для взаимодействия с наклонной поверхностью штыревого захватного органа и с вырезом и задней кромкой этого выреза для взаимодействия с задней стенкой паза штыревого управляющего органа. Отводящий клин снабжен зацепом, перекрывающим вертикальный паз корпуса над штыревым захватным органом. Технический результат заключается в расширении технических возможностей и повышении эксплуатационной надежности автоматизированных грузозахватных устройств. 5 ил.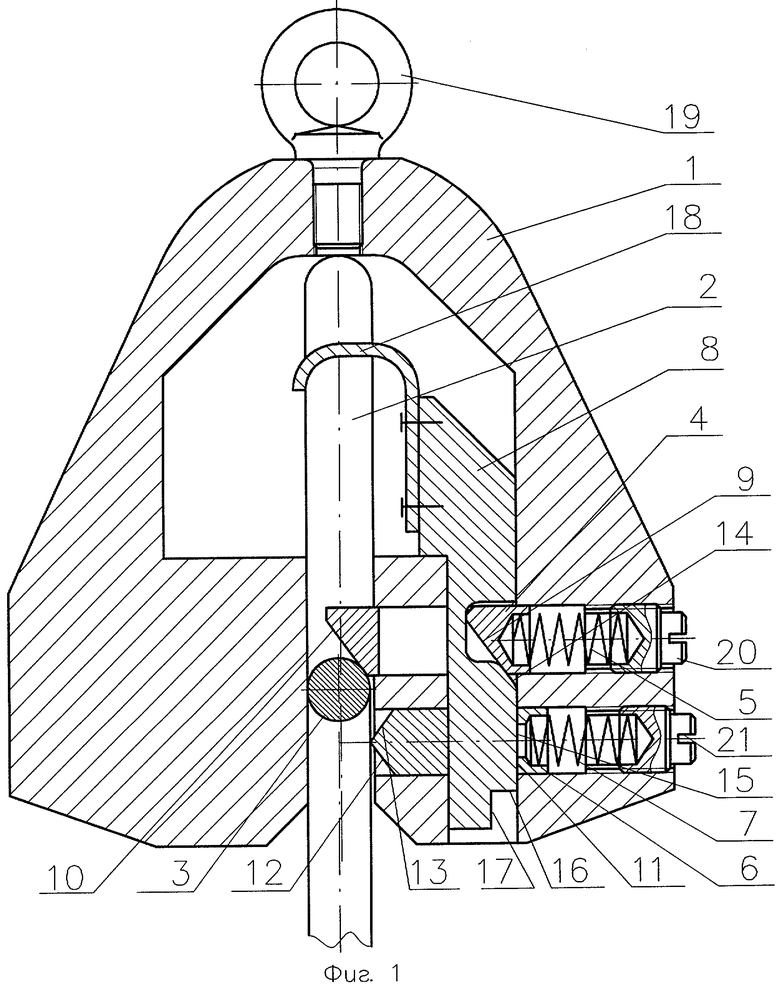
Автоматизированное грузозахватное устройство, содержащее корпус с вертикальным пазом, предназначенным для ориентации и размещения монтажной скобы груза, размещенные в корпусе с возможностью перекрытия вертикального паза путем поперечного относительно него поступательного перемещения подпружиненные штыревые захватный и управляющий органы и взаимодействующий с ними размещенный в корпусе с возможностью продольного относительно вертикального паза корпуса поступательного перемещения отводящий клин, при этом штыревой захватный орган выполнен с наклонной поверхностью для взаимодействия с монтажной скобой груза при ее захвате, а штыревой управляющий орган выполнен с наклонной поверхностью для взаимодействия с монтажной скобой при ее захвате и наклонной поверхностью для взаимодействия с монтажной скобой при ее освобождении, а отводящий клин выполнен с наклонной поверхностью и задней кромкой для взаимодействия с наклонной поверхностью штыревого захватного органа и с вырезом и задней кромкой этого выреза для взаимодействия с задней стенкой паза штыревого управляющего органа, отличающееся тем, что отводящий клин снабжен зацепом, перекрывающим вертикальный паз корпуса над штыревым захватным органом.
| Кравченко П.Д | |||
| и др | |||
| Проектирование нестандартного оборудования | |||
| Тяжелое и атомное машиностроение: Монография | |||
| - Шахты: ЮРГУЭС, 2001, c.243-244 | |||
| Строп для подъема груза | 1974 |
|
SU703469A1 |
| Захватное устройство Касымова Калкена | 1990 |
|
SU1730001A1 |
| СИСТЕМА ДЛЯ ТЕПЛОВОЙ ЗАЩИТЫ И УМЕНЬШЕНИЯ ЛОБОВОГО СОПРОТИВЛЕНИЯ СВЕРХВЫСОКОСКОРОСТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2671064C1 |

