Изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, которые применяются для выполнения вспомогательных операций при обслуживании технологических машин и устройств различного целевого назначения. Такие манипуляционные механизмы, имитируя определенные движения рук человека, обеспечивают захват изделия (объекта манипулирования), его перемещение из одной позиции в другую, освобождение и передачу изделия
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С.9 и 10, рис. а).
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами-автоматами и линиями высокой производительности.
Известно также устройство типа "рука" для передачи предметов, выполненное в виде комбинированного механизма, содержащего исполнительный механизм с губками для захвата предметов, передаточный механизм и привод (патент 2154569 (РФ), опубл. в Б.И. и П.М., 2000. - 23 - прототип).
Основным недостатком прототипа является сравнительная сложность структуры кинематической цепи и связанное с ней большое количество подвижных звеньев и кинематических пар. Это снижает точность функционирования устройства и увеличивает энергозатраты на реализацию процесса.
Задачей настоящего изобретения является упрощение конструкции и повышение эффективности работы устройства.
Решение поставленной задачи достигается тем, что в устройстве типа "рука" для передачи изделий, содержащем комбинированный механизм, выполненный в виде передаточного механизма с выходным звеном, исполнительного механизма с ведущими и выходными звеньями, последние из которых снабжены губками для захвата изделий и подвижно сопряжены с выходным звеном передаточного механизма, и привода, ведущие звенья исполнительного механизма выполнены в виде неподвижного копира.
Передаточный механизм выполнен в виде кривошипно-коромыслового механизма с выходным звеном в виде коромысла, при этом соотношение длин звеньев механизма определено следующим выражением:
(λ2-λ1)2+λ
где λ1 - относительная длина кривошипа;
λ2 - относительная длина шатуна;
λ3 - относительная длина коромысла;
λ1=r/d, λ2=l/d, λ3=b/d;
r, l, b - длина соответственно кривошипа, шатуна, коромысла;
d - расстояние между центрами вращения кривошипа и качания коромысла.
Подвижное сопряжение выходных звеньев передаточного и исполнительного механизмов содержит палец, жестко закрепленный на свободном конце выходного звена передаточного механизма.
Губки для захвата изделий жестко закреплены на выходных звеньях исполнительного механизма.
Копир выполнен в виде плиты, жестко закрепленной на стойке, при этом в теле плиты выпалены продольные фигурные пазы для сопряжения с выходными звеньями исполнительного механизма.
На свободных концах выходных звеньев исполнительного механизма смонтированы ролики для взаимодействия с фигурными пазами копира.
Расстояние от центра качания выходного звена передаточного механизма до оси пальца, содержащегося в подвижном сопряжении выходных звеньев, определено следующим выражением:
L=S/2sin(β/2), (2)
где L - расстояние от центра качания выходного звена до оси пальца;
S - расстояние между осями пальца в крайнем положении выходных звеньев;
β - полный угол размаха выходного звена.
Заявляемое устройство отличается от прототипа сочетанием конструктивных элементов и наличием связи между элементами, обеспечивающими упрощение конструкции и повышение эффективности работы. В отличие от прототипа в предлаемом устройстве ведущие кулачки не совершают возвратно-поворотного движения вместе с выходным звеном передаточного механизма, не совершают они и вращательного движения. Кроме того, в отличие от прототипа в предлагаемом устройстве нет системы гибкой связи между передаточным и исполнительным механизмами. Эти отличия в целом определяют существенные преимущества предлагаемого устройства.
Выполнение ведущих звеньев исполнительного механизма в виде неподвижного копира исключает необходимость вращательного и дугового (кругового) движения ведущих кулачков, что имеет место в прототипе. При этом исключается система гибкой связи, обеспечивающая в прототипе вращательное движение ведущих кулачков. Это упрощает конструкцию устройства и исключает энергозатраты на движение масс шкивов и кулачков.
Выполнение передаточного механизма в виде кривошипно-коромыслового механизма, длины звеньев которого соответствуют равенству (1), является предпочтительным. Механизм с таким соотношением длин звеньев имеет благоприятную для процесса передачи изделий силовую работоспособность, наибольшие значения которой обеспечиваются в первой половине интервала рабочего хода.
Подвижное сопряжение (шарнирная связь) выходных звеньев передаточного и исполнительного механизмов, выполненное посредством пальца, жестко закрепленного на свободном конце выходного звена передаточного механизма, является более технологичным решением, чем крепление пальца на одном из выходных звеньев исполнительного механизма. Такой палец обеспечивает надежную шарнирную связь выходных звеньев передаточного и исполнительного механизмов.
Крепление губок к выходным звеньям, смонтированным на пальце, оказывается более технологичным решением, чем возможное шарнирное крепление губок на пальце и связь с ними выходных звеньев. Это определяется тем, что форма губок зависит от формы передаваемых изделий, так что смена ассортимента нередко приводит к необходимости замены губок. Предложенное решение представляется более мобильным.
Выполнением копира в виде плиты с фигурными пазами обеспечивается возможность для геометрического замыкания высших кинематических пар и исключается необходимость использования пружин или груза, обязательных при силовом замыкании.
Применение роликов на выходных звеньях исполнительного механизма уменьшает износ рабочих профилей фигурных пазов копира и таким образом способствует сохранению точности функционирования губок устройства
Формула (2) дает возможность, не прибегая к графическому построению, определить полную длину выходного звена (коромысла) с учетом угла размаха последнего и расстояния между центрами позиций "схвата" и выдачи изделия.
На чертеже представлено устройство типа "рука" для передачи изделий, кинематическая схема.
Устройство содержит комбинированный механизм 1, выполненный в виде передаточного механизма 2 и исполнительного механизма 3 с губками 4 для захвата изделий, и привод 5.
Механизм 2 включает кривошип 6, жестко закрепленный на валу 7 привода 5, шатун 8, шарнирно связанный с кривошипом 6, выходное звено (коромысло) 9, шарнирно связанное с шатуном 8 и стойкой 10. Длины звеньев механизма 2 соответствуют выражению (1).
Исполнительный механизм 3 выполнен в виде неподвижного копира 11 с фигурными пазами 12 и 13 и выходных звеньев 14 и 15 с жестко закрепленными на них губками 4 для захвата изделий. Звенья 14 и 15 шарнирно связаны с выходным звеном 9 передаточного механизма посредством пальца 16, жестко закрепленного на упомянутом выходном звене. На свободных концах звеньев 14 и 15 смонтированы ролики 17 и 18 для взаимодействия с фигурными пазами 12 и 13 копира 11, который жестко закреплен на неподвижном основании.
Форма губок 4 соответствует форме передаваемых изделий, при захвате и переносе изделия обеспечивается сопряжение губок с изделием по большей части периметра последнего.
Устройство типа "рука" для передачи изделий работает следующим образом.
При работе привода 5 вал 7 с закрепленным на нем кривошипом 6 совершает вращательное движение, которое посредством шатуна 8 преобразуется в возвратно-поворотное движение выходного звена 9, состоящее из рабочих и холостых ходов.
При движении звена 9 ролики 17 и 18 выходных звеньев 14 и 15 исполнительного механизма взаимодействуют с фигурными пазами 12 и 13 копира 11, сообщая выходным звеньям 14 и 15 поворотные движения и выстои относительно звена 9 передаточного механизма. При этом губки 4 выполняют аналогичные движения и выстои.
Началу рабочего хода устройства соответствует его положение, при котором выходное звено 9 механизма 2 находится в крайнем положении, соответствующем границе интервалов рабочего и холостого ходов. При этом губки 4 разжаты и готовы для "схвата" изделия.
В интервале рабочего хода устройства губки 4 занимают сжатое положение, выполняя операцию переноса изделия в позицию выдачи, при этом губки удерживают изделие, переносимое по дугообразной траектории.
По завершении рабочего хода губки 4 разжимаются и перестают удерживать изделие, переданное из одной позиции в другую. При выполнении холостого хода устройства положение губок зависит от профилей фигурных пазов 12 и 13 копира 11.
Губки 4, закрепленные на выходных звеньях 14 и 15 исполнительного механизма 3, могут совершать поворотные движения относительно звена 9 и выстои заданной продолжительности одновременно или последовательно со смещением во времени. Этим обеспечивается возможность выбора закона движения губок предпочтительного для передаваемых изделий.
В интервале кинематического (рабочего) цикла устройства губки 4 совершают сложное движение, состоящее из двух простых движений: возвратно-поворотного с выстоями относительно звена 9 и возвратное движение по дугообразной траектории вместе со звеном 9.
Применение исполнительного механизма, в котором ведущие звенья выполнены в виде копира, а выходные шарнирно связаны с выходным звеном передаточного механизма, дает возможность упростить конструкцию устройства и повысить эффективность его работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2005 |
|
RU2284262C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2176592C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ПРЕДМЕТОВ | 1999 |
|
RU2154569C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2331507C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2346804C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191109C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224639C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |
| УСТРОЙСТВО ДЛЯ НАПОЛНЕНИЯ БАНОК ПРОДУКТОМ | 1999 |
|
RU2165874C1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ШТУЧНЫХ ПРЕДМЕТОВ | 1996 |
|
RU2146213C1 |
Изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, которые применяются для выполнения вспомогательных операций при обслуживании машин и устройств различного целевого назначения. Устройство содержит комбинированный механизм, выполненный в виде передаточного механизма с выходным звеном, исполнительного механизма с ведущими и выходными звеньями, последние из которых снабжены губками для захвата изделий и подвижно сопряжены с выходным звеном передаточного механизма, и привода. Ведущие звенья исполнительного механизма выполнены в виде неподвижного копира. Передаточный механизм выполнен в виде кривошипно-коромыслового механизма с выходным звеном в виде коромысла. Подвижное сопряжение выходных звеньев передаточного и исполнительного механизмов выполнено посредством пальца, жестко закрепленного на свободном конце выходного звена передаточного механизма. Копир выполнен в виде плиты, жестко закрепленной на стойке, при этом в теле плиты выполнены продольные фигурные пазы для сопряжения с выходными звеньями исполнительного механизма. На свободных концах выходных звеньев исполнительного механизма смонтированы ролики для взаимодействия с фигурными пазами копира. Изобретение позволит снизить энергозатраты на процесс передачи изделий и расширить технологические возможности устройства. 6 з.п.ф-лы, 1 ил.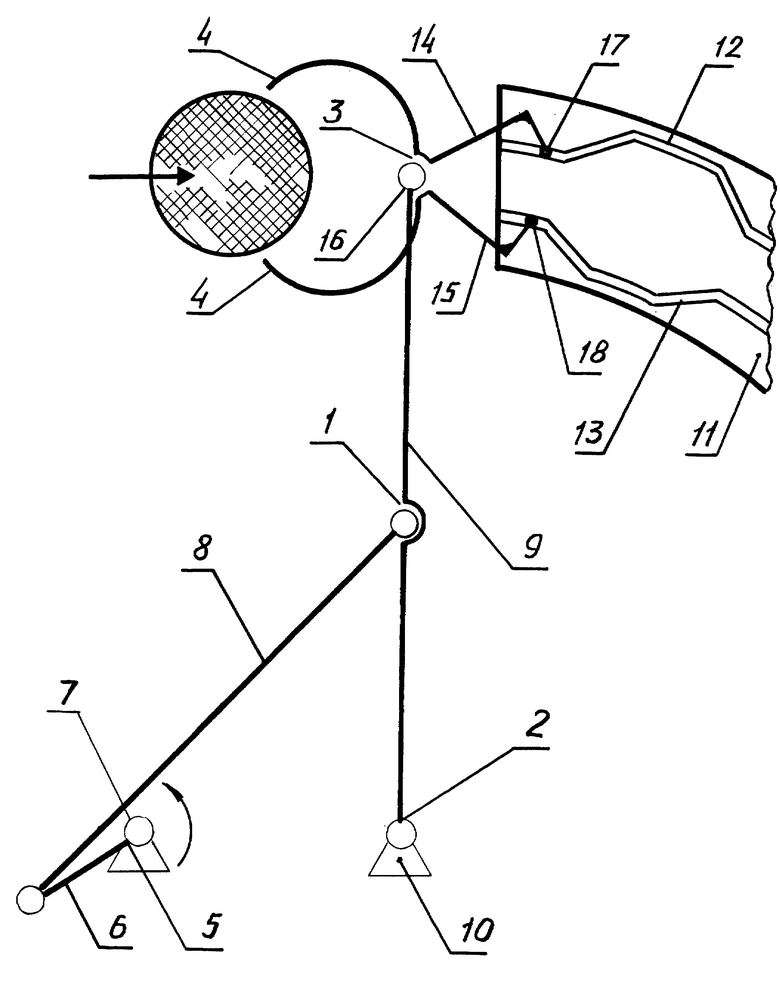
(λ2-λ1)2+λ
где λ1 - относительная длина кривошипа;
λ2 - относительная длина шатуна;
λ3 - относительная длина коромысла;
λ1= r/d, λ2= l/d, λ3= b/d;
r, l, b - длина соответственно кривошипа, шатуна, коромысла;
d - расстояние между центрами вращения кривошипа и качания коромысла.
L= S/2sin(β/2),
где L - расстояние от центра качания выходного звена до оси пальца;
S - расстояние между осями пальца в крайних положениях выходного звена;
β - полный угол размаха выходного звена.
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ПРЕДМЕТОВ | 1999 |
|
RU2154569C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2177404C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 1999 |
|
RU2164860C1 |
| US 5885052 A, 23.03.1999 | |||
| Способ производства твердого сычужного сыра | 2018 |
|
RU2716400C2 |

