Предполагаемое изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, которые применяются для выполнения вспомогательных операций при обслуживании машин, станков, прессов, устройств различного целевого назначения. Такие манипуляционные механизмы, имитируя определенные движения рук человека, обеспечивают захват предмета (объекта манипулирования), его перемещение из одной позиции в другую, освобождение предмета.
Известно, например, манипуляционное устройство, обеспечивающее захват предмета, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата предметов, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. -С. 9 и 10, рис. а - прототип). Данное устройство является средством того же назначения, что и предполагаемое изобретение.
Основным недостатком данного устройства являются усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток предопределен наличием отдельных двигателей для механизмов захвата и поворота, а также использованием тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами-автоматами и линиями высокой производительности.
Задачей настоящего изобретения является повышение мобильности привода и обеспечение возможности увеличения производительности устройства.
Решение поставленной задачи достигается тем, что в устройстве типа "рука" для передачи предметов, содержащем комбинированный механизм, выполненный в виде подвижного основания, несущего исполнительный механизм с ведущим звеном и губками для захвата предметов, механизма поворота подвижного основания, включающего ведущее звено, и привода, механизм поворота основания выполнен в виде шарнирного четырехзвенника, выходное звено которого жестко соединено с подвижным основанием, а ведущие звенья механизма поворота основания и исполнительного механизма кинематически связаны между собой.
Шарнирный четырехзвенник выполнен в виде кривошипно- коромыслового механизма, с выходным звеном в виде коромысла, а соотношение длин звеньев упомянутого механизма определено следующим выражением:
(1+λ1)2 = λ
где λ1 - относительная длина кривошипа;
λ2 - относительная длина шатуна;
λ3 - относительная длина коромысла;
λ1 = r/d, λ2 = l/d, λ3 = b/d;
r, l, b - длина соответственно кривошипа, шатуна, коромысла;
d - расстояние между центрами вращения кривошипа и качания коромысла.
Исполнительный механизм выполнен с выходными звеньями, на которых жестко закреплены губки для захвата предметов, ведущее звено исполнительного механизма выполнено в виде блока из двух ведущих кулачков, а оси кулачков и упомянутых выходных звеньев закреплены на подвижном основании.
Кинематическая связь ведущих звеньев механизма поворота основания и исполнительного механизма выполнена в виде шкивов и гибких элементов, при этом шкивы смонтированы на валу кривошипа, на оси качания коромысла и непосредственно на блоке кулачков соосно оси его вращения.
К тому же устройство снабжено плитой с криволинейным пазом, а подвижное основание шарнирно связано с осью качания выходного звена механизма поворота основания и снабжено опорным роликом, установленным в упомянутом криволинейном пазу.
Кроме того, шкив, смонтированный на оси качания коромысла, выполнен двухручьевым.
Заявляемое устройство отличается от прототипа сочетанием конструктивных элементов и наличием связи между элементами, обеспечивающей отбор мощности на механизмы поворота основания и захвата предметов от одного электромеханического привода. Предложенная связь конструктивных элементов и взаимное расположение элементов в совокупности обеспечивают возможность быстродействия устройства и соответствующего повышения его производительности по числу рабочих циклов.
Выбор шарнирного четырехзвенника с соотношением длин звеньев (1+λ1)2 = λ
Преимущества кулачкового механизма захвата предметов заключаются в том, что выходные звенья таких механизмов и жестко связанные с ними рабочие губки могут в зависимости от профиля кулачков совершать движение по любому заданному закону. Это позволяет с учетом формы и массы предмета (объекта манипулирования) принять тот или иной наиболее предпочтительный закон движения губок. Исполнительный механизм при таком конструктивном его исполнении может эффективно выполнять операции захвата, перемещения и освобождения объекта манипулирования.
Гибкая связь между механизмом поворота основания и исполнительным механизмом с губками для захвата предметов обеспечивает синхронность движения их ведущих звеньев и упрощает отбор мощности от одного электромеханического привода.
Наличие опорного ролика на подвижном основании способствует уменьшению упругих деформаций основания при работе устройства, возникающих при значительных массах объектов манипулирования. Это означает, что наличие ролика уменьшает консоль в креплении подвижного основания относительно оси его качания, повышает жесткость основания и точность функционирования устройства.
Выполнение шкива, смонтированного на оси качания коромысла, двухручьевым дает возможность размещать гибкие элементы кинематической связи в параллельных плоскостях. Это уменьшает число шкивов и упрощает конструкцию устройства.
На чертеже представлено устройство типа "рука" для передачи предметов, кинематическая схема.
Устройство содержит подвижное основание 1, несущее исполнительный механизм 2 с губками 3 для захвата предметов, механизм 4 поворота основания, который обеспечивает возвратно-поворотное движение упомянутого основания 1, и привод 5.
Механизм 4 включает шарнирно связанные кривошип 6, шатун 7, выходное звено 8 и стойку 9, при этом с выходным звеном жестко соединено подвижное основание 1, которое для повышения жесткости может иметь дополнительно шарнирную связь с осью 10 качания выходного звена 8. Длины звеньев механизма 4 соответствуют выражению (1).
Исполнительный механизм 2 выполнен в виде блока из двух ведущих кулачков 11 и 12, на выходных звеньях 13 и 14 механизма закреплены губки 3 для захвата предметов, при этом блок ведущих кулачков и выходные звенья смонтированы соответственно на осях 15 и 16, жестко закрепленных на основании 1.
Кинематическая связь кривошипа 6 механизма 4 и кулачков 11 и 12 исполнительного механизма 2 содержит шкивы 17, 18 и 19, смонтированные соответственно на валу 20 кривошипа 6, на оси 10 качания выходного звена 8 и непосредственно на блоке кулачков 11 и 12 соосно оси вращения блока, и гибкие элементы 21 и 22 для передачи вращения по схеме: вал 20 кривошипа - ось качания выходного звена 8 - блок ведущих кулачков 11 и 12.
На подвижном основании 1 смонтирован опорный ролик 23 для взаимодействия с криволинейным пазом 24 плиты 25. Вал 20 кривошипа 6 связан с электромеханическим приводом 5.
Устройство типа "рука" для передачи предметов работает следующим образом.
При работе привода 5 вал 20 с закрепленным на нем кривошипом 6 совершает вращательное движение, которое посредством шатуна 7 преобразуется в возвратно-поворотное движение выходного звена 8, состоящее из рабочих и холостых ходов. Синхронно с выходным звеном 8 возвратно-поворотное движение совершает основание 1, несущее исполнительный механизм 2.
Вращение вала 20 посредством шкивов 17, 18, 19 и гибких элементов 21 и 22 передается блоку ведущих кулачков 11 и 12. При вращении кулачков выходные звенья 13 и 14 механизма 2 совершают поворотные движения с выстоями заданной продолжительности, при этом губки 3 выполняют аналогичные поворотные движения. Началу рабочего хода устройства соответствует его положение в позиции загрузки предметов, при котором выходное звено 8 механизма 4 и основание 1 находятся в крайнем положении, соответствующем границе интервалов рабочего и холостого ходов. При этом губки 3 раскрыты для приема и последующего захвата предмета(ов).
В интервале рабочего хода устройства выполняются операции захвата предмета и последующего его переноса в позицию установки, сброса или укладки, при этом губки 3, находясь в сжатом состоянии, удерживают предмет, переносимый по дугообразной траектории.
По завершении рабочего хода губки 3 разжимаются и перестают удерживать предмет, переданный из одной позиции в другую. При выполнении холостого хода устройства положение губок (разжаты, сжаты) зависит от профилей ведущих кулачков 11 и 12.
При работе устройства ролик 23 взаимодействует с криволинейным (дугообразным) пазом 24 плиты 25, исключая прогиб и вибрации основания 1.
Губки 3, закрепленные на выходных звеньях 13 и 14 исполнительного механизма 2, могут совершать поворотные движения относительно оси 16 и выстой заданной продолжительности одновременно или последовательно со смещением во времени. Этим обеспечивается возможность выбора закона движения губок, предпочтительного для передаваемых предметов.
Выполнение устройства для передачи предметов в виде совокупности кинематически связанных шарнирного четырехзвенника и кулачкового механизма с двумя ведущими кулачками повышает его мобильность и обеспечивает возможность для увеличения производительности.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2176592C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2193963C1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ СИЛОВЫХ НАГРУЗОК | 1998 |
|
RU2141586C1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ ПЕРЕМЕННЫХ СИЛОВЫХ НАГРУЗОК | 1997 |
|
RU2126919C1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ ПЕРЕМЕННЫХ СИЛОВЫХ НАГРУЗОК | 1998 |
|
RU2141587C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2172240C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2005 |
|
RU2284262C1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ СИЛОВЫХ НАГРУЗОК | 1999 |
|
RU2157934C2 |
| МАШИНА ДЛЯ УКЛАДКИ В ТАРУ ШТУЧНЫХ ИЗДЕЛИЙ | 1993 |
|
RU2085451C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 1999 |
|
RU2164860C1 |
Изобретение может быть использовано для выполнения вспомогательных операций при обслуживании оборудования в различных отраслях машиностроения. На подвижном основании смонтирован исполнительный механизм с ведущим звеном и губками для захвата предметов. Основание имеет возможность поворота под действием механизма в виде шарнирного четырехзвенника. Выходное звено последнего жестко соединено с подвижным основанием. Ведущие звенья механизма поворота и исполнительного механизма кинематически связаны между собой. Шарнирный четырехзвенник может быть выполнен в виде кривошипно-коромыслового механизма с выходным звеном в виде коромысла. Соотношение длин звеньев этого механизма определено приведенным математическим выражением. Губки для захвата предмета закреплены на выходных звеньях исполнительного механизма. Его ведущее звено представляет собой блок из двух ведущих кулачков. Кинематическая связь ведущих звеньев механизма поворота и исполнительного механизма может быть выполнена в виде шкивов и гибких элементов. Подвижное основание может быть шарнирно связано с осью качания выходного звена механизма поворота и оснащено опорным роликом. Ролик установлен в криволинейном пазу плиты. В результате обеспечивается повышение мобильности привода и производительности устройства. 5 з.п. ф-лы, 1 ил.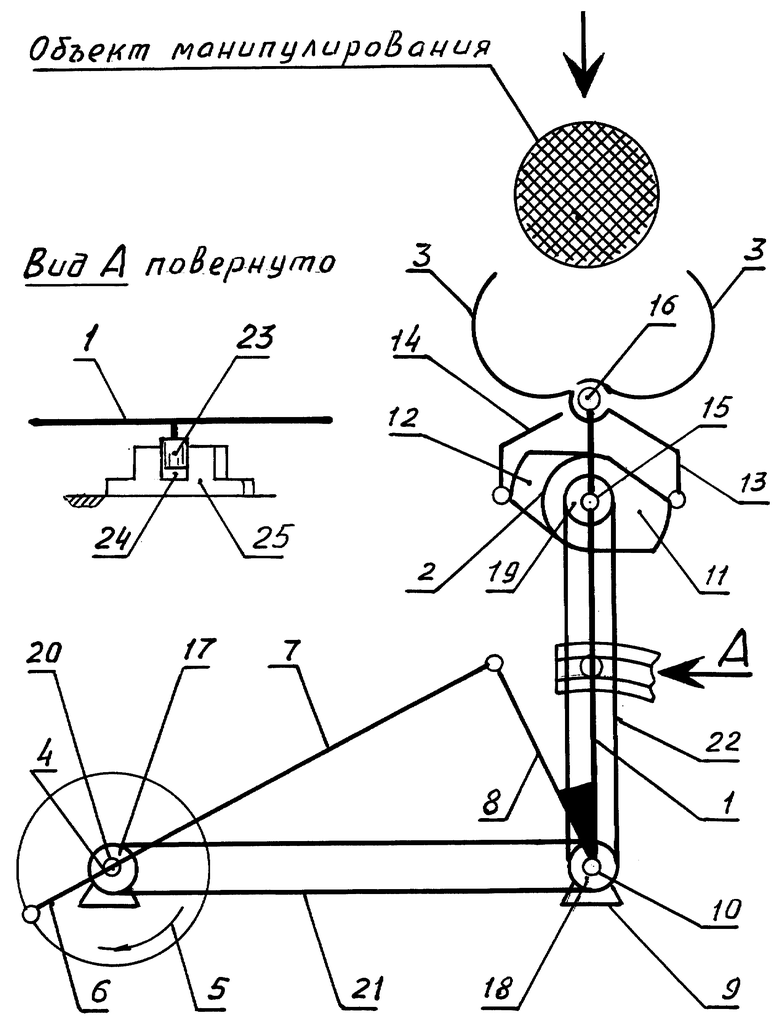
(1+λ1)2 = λ
где λ1 - относительная длина кривошипа;
λ2 - относительная длина шатуна;
λ3 - относительная длина коромысла;
λ1 = r/d, λ2 = l/d, λ3 = b/d;
r, l, b - длина, соответственно, кривошипа, шатуна, коромысла;
d - расстояние между центрами вращения кривошипа и качания коромысла.
| Крайнев А.Ф | |||
| Словарь-справочник по механизмам | |||
| - М.: Машиностроение, 1987, с.9-10, фиг.а | |||
| Механическая рука | 1982 |
|
SU1110623A1 |
| SU 1293022 A2, 28.02.1987 | |||
| US 5885052 A, 23.03.1999 | |||
| Способ производства твердого сычужного сыра | 2018 |
|
RU2716400C2 |
