Изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, применяемым при обслуживании машин и средств различного целевого назначения. Такие манипуляционные механизмы, имитируя определенные движения рук человека, обеспечивают захват изделия (объекта манипулирования), его перемещение из одной позиции в другую и освобождение изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М: Машиностроение, 1987. - С. 9 и 10, рис. а. - прототип). Данное устройство является средством того же назначения, что и предлагаемое изобретение.
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Этот недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при использовании устройства в машинах-автоматах и линиях высокой производительности.
Задачей настоящего изобретения является расширение технологических возможностей и повышение производительности устройства.
Решение поставленной задачи достигается тем, что в устройстве типа "рука" для передачи изделий, содержащем комбинированный механизм, выполненный в виде подвижного основания, исполнительного механизма с ведущим звеном и губками для захвата изделий, механизма поворота подвижного основания, включающего ведущее звено, и привода, исполнительный механизм выполнен в виде многозвенного механизма с выходными звеньями, на которых закреплены губки для захвата изделий, а механизм поворота подвижного основания выполнен в виде рычажно-зубчатого механизма, выходное звено которого жестко соединено с упомянутым основанием, при этом ведущие звенья механизма поворота основания и исполнительного механизма кинематически связаны между собой.
Рычажно-зубчатый механизм выполнен в виде кривошипно-ползунного механизма, с ползуном которого сопряжено выходное звено в виде шестерни, при этом шестерня смонтирована на оси качания подвижного основания.
Многозвенный механизм состоит из дополнительного кривошипно-ползунного механизма и сопрягаемых с ползуном последнего выходных звеньев с губками для захвата изделий.
Кинематическая связь ведущих звеньев механизма поворота основания и дополнительного механизма выполнена в виде двух шкивов и гибкого элемента, при этом один шкив жестко укреплен на валу ведущего звена механизма поворота подвижного основания, а другой смонтирован на оси качания основания и жестко соединен с ведущим звеном исполнительного механизма.
Комбинированный механизм с двумя кривошипами удовлетворяет структурной формуле кинематической цепи:
W = 3•n-2•p5 - p4 = 3•8-2•10 -2 = 2,
где W - число степеней свободы выходных звеньев;
n - число подвижных звеньев, n = 8;
p5 - число низших кинематических пар, p5 = 10;
p4 - число высших кинематических пар, p4 = 2.
Кривошипно-ползунный механизм включает шарнирно связанные кривошип, шатун и ползун, при этом ползун выполнен в виде зубчатой рейки для взаимодействия с шестерней.
Выходные звенья исполнительного механизма с губками для захвата изделий смонтированы шарнирно на оси, жестко укрепленной на подвижном основании.
Шестерня удовлетворяет условию:
где d - диаметр делительной окружности шестерни;
S - максимальный ход ползуна кривошипно-ползунного механизма;
β - полный угол размаха подвижного основания; 
Кривошипно-ползунный механизм выполнен в виде центрального механизма, для которого S = 2•r, где S - максимальный ход ползуна; r - длина кривошипа.
Дополнительный кривошипно-ползунный механизм включает шарнирно связанные кривошип, шатун и ползун, при этом последний выполнен в виде призмы со сквозным прямоугольным отверстием по длине для сопряжения ее с подвижным основанием.
Призма снабжена ушком для шарнирной связи ее с упомянутым шатуном.
Концевые участки боковин призмы имеют конусность, при этом по длине боковин выполнены открытые продольные канавки для сопряжения призмы с выходными звеньями исполнительного механизма.
Устройство снабжено плитой с криволинейным пазом и опорным роликом, смонтированным на подвижном основании и расположенным в упомянутом пазу.
Интервалы прямых и обратных ходов механизма поворота подвижного основания и исполнительного механизма совмещены во времени.
Заявляемое устройство отличается от прототипа сочетанием конструктивных элементов и наличием связи между элементами, обеспечивающей отбор мощности на механизм поворота подвижного основания и исполнительный механизм с губками для захвата изделий от одного электромеханического привода. Предложенная связь конструктивных элементов и взаимное расположение элементов в совокупности обеспечивают упрощение конструкции привода, повышение точности функционирования исполнительного механизма, возможность быстродействия устройства и соответствующего повышения его производительности, расширяют диапазон передаваемых объектов манипулирования.
Выполнение устройства в виде системы, включающей подвижное основание, исполнительный механизм и механизм поворота подвижного основания, в котором ведущие звенья упомянутых механизмов кинематически связаны между собой, обеспечивает решение задачи совершенствования прототипа в части упрощения привода, расширения технологических возможностей и повышения производительности.
Выбор рычажно-зубчатого механизма, построенного на базе центрального кривошипно-ползунного механизма, для реализации возвратно-поворотного движения подвижного основания имеет свои преимущества. Удовлетворяя структурной формуле кинематической цепи:
W = 3•n-2•p5 - p4 = 3•4-2•5 -1 = 1,
такой механизм отличается простотой конструкции, надежностью работы, точностью текущего положения основания при любом угле размаха последнего, способностью передавать большую силовую нагрузку. Здесь W - степень подвижности основания; n - число подвижных звеньев, n = 4; p5 - число низших кинематических пар, p5; p4 - число высших кинематических пар, p4 = 1.
Выполнение исполнительного механизма в виде пятизвенного рычажного механизма, включающего дополнительный кривошипно-ползунный механизм и сопрягаемые с ползуном последнего выходные звенья с губками для захвата изделий, также имеет свои преимущества. Ползун такого механизма выполняет функцию копира, совершающего возвратно-поступательное движение с переменной скоростью, при этом в зависимости от формы боковин ползуна обеспечивается тот иди иной закон движения выходных звеньев с губками для захвата изделий. При технологической необходимости можно также обеспечить движение каждой из губок по своему закону.
Гибкая связь между механизмом поворота подвижного основания и исполнительным механизмом с губками для захвата изделий обеспечивает синхронность движения их ведущих звеньев и упрощает отбор мощности от одного электромеханического привода.
Комбинированный механизм устройства, имея два ведущих звена, выполненных в виде кинематически связанных кривошипов, удовлетворяет первому условию работоспособности, т. е. соответствует формуле Чебышева. Это указывает на правильность построения кинематической цепи устройства.
Выполнение ползуна в виде зубчатой рейки, которая посредством шестерни связана с подвижным основанием, обеспечивает большой угол размаха основания (до 180o и более). Это расширяет границы использования устройства при различных удалениях одна от другой позиций загрузки и выгрузки изделий.
Шарнирная связь выходных звеньев исполнительного механизма с подвижным основанием дает возможность губкам для захвата изделий совершать сложное движение: возвратно-поворотное вместе с подвижным основанием и возвратно-поворотное с выстоями относительно основания. Повороты губок относительно основания обеспечиваются посредством ползуна дополнительного кривошипно-ползунного механизма.
Выражение (1) позволяет рассчитать определяющий параметр (d) шестерни при заданных значениях максимального хода (S) ползуна кривошипно-ползунного механизма и полного угла (β) размаха подвижного основания.
Дополнительный кривошипно-ползунный механизм выполнен с нулевым эксцентриситетом, в нем временные интервалы прямого и обратного ходов ползуна равны. Это упрощает совмещение циклов движения исполнительного механизма и механизма поворота подвижного основания.
Кривошипно-ползунный механизм, на базе которого построен пятизвенный механизм поворота подвижного основания, выполнен с равновеликими интервалами прямого и обратного ходов, что позволяет равноценно использовать любой из них в качестве рабочего хода.
При выполнении ползуна дополнительного кривошипно-ползунного механизма в виде призмы с прямоугольным отверстием по длине для сопряжения с поворотным основанием исключается возможность разворота ползуна при его движении относительно продольной оси основания. Форма и размеры ушка для шарнирной связи призмы с шатуном не являются лимитирующими.
Конусность на концевых участках призмы, взаимодействующей с выходными звеньями, при ее движении в начале и конце прямого хода обеспечивает соответственно "схват" изделия губками и "освобождение" изделия, а в начале и конце обратного хода - соответственно "сжатие" к "разжатие" губок без изделия. На границах интервалов прямого и обратного ходов призмы губки занимают исходное, т. е. разжатое положение. Открытые продольные канавки в боковинах ползуна способствуют наличию постоянного контакта роликов выходных звеньев, несущих губки, с ползуном, выполняющим функцию копира.
Наличие опорного ролика на подвижном основании, взаимодействующего с фигурным пазом неподвижной плиты, уменьшает консоль в креплении основания относительно оси его качания и способствует уменьшению упругих деформаций основания, возможных при значительных массах объектов манипулирования. В результате обеспечиваются необходимая жесткость основания и точность функционирования устройства.
Совмещение ходов во времени обеспечивает такую работу устройства, при которой механизм поворота и исполнительный механизм одновременно начинают одноименный ход и в одно время его заканчивают, начало и окончание одноименных ходов обоих механизмов совпадает во времени. Такое совмещение достигается благодаря тому, что упомянутые механизмы являются центральными, а их ведущие звенья совершают синхронное движение.
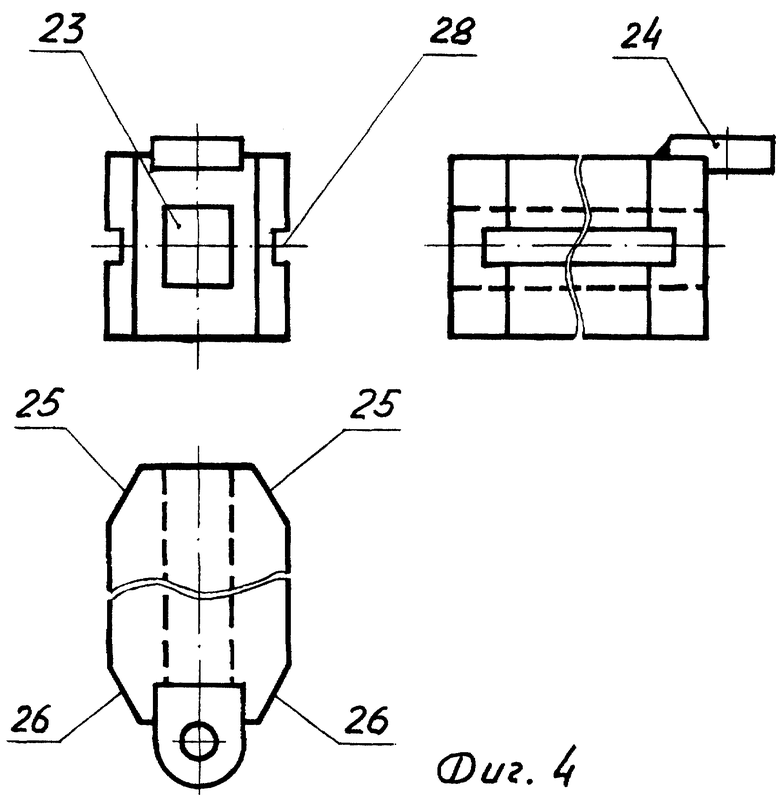
На фиг. 1 изображена кинематическая схема устройства; на фиг. 2 - то же, вид сбоку на фиг. 3 - циклограмма; на фиг. 4 - ползун.
Устройство содержит подвижное основание 1, исполнительный механизм 2 с губками 3 для захвата изделий, механизм 4, который обеспечивает возвратно-поворотное движение основания 1, и привод 5.
Механизм 4 включает шарнирно связанные кривошип 6, шатун 7 и ползун, выполненный в виде зубчатой рейки 8, и шестерню 9, взаимодействующую с рейкой, при этом рейка подвижно сопряжена с направляющей 10, а шестерня смонтирована на оси качания основания 1 и жестко с ним соединена. Диаметр делительной окружности шестерни 9 соответствует выражению (1), он определен в зависимости от максимального хода рейки 8 и полного угла размаха основания 1.
Исполнительный механизм 2 выполнен в виде пятизвенного механизма, который включает дополнительный кривошипно-ползунный механизм 11, состоящий из кривошипа 12, шатуна 13 и ползуна 14, и выходные звенья 15 и 16 с губками 3 для захвата изделий, взаимодействующие с ползуном 14. При этом кривошип 12 смонтирован на оси качания 17 основания 1, ползун 11 подвижно сопряжен с основанием 1, а выходные звенья 15 и 16 смонтированы шарнирно на оси 18, жестко закрепленной на упомянутом основании.
Кинематическая связь кривошипов 6 и 12 механизмов 4 и 2 содержит шкивы 19 и 20, смонтированные соответственно на валу 21 кривошипа 6 и на оси 17 качания основания 1, и гибкий элемент 22 для передачи вращения по схеме: вал 21 кривошипа 6 - шкив 20, смонтированный на оси 17. Кривошипы 6 и 12 жестко соединены соответственно со шкивами 19 и 20.
Ползун 14 дополнительного кривошипно-ползунного механизма 11 выполнен в виде призмы (фиг. 4) со сквозным прямоугольным отверстием 23 по длине для сопряжения ее с основанием 1. Призма снабжена ушком 24 для шарнирной связи ее с шатуном 13. Концевые участки 25 и 26 боковин призмы имеют конусность, а по длине боковин выполнены продольные канавки 27 и 28 для сопряжения призмы с выходными звеньями 15 и 16 посредством роликов 29 и 30. Ушко 24 имеет отверстие (фиг. 4) для: пальца, шарнирно связывающего шатун 13 с ползуном (не показан).
Ось 18 для шарнирной связи выходных звеньев 15 и 16 с подвижным основанием 1 образует с последним жесткое разъемное соединение. Для этого на свободном конце основания 1 выполнено сквозное резьбовое отверстие, а ось 18 имеет резьбовой конец для сопряжения с основанием посредством упомянутого резьбового отверстия.
Кривошипы 6 и 12 имеют консольное крепление соответственно на валу 21 привода 5 и на оси 17 качания подвижного основания 1.
На подвижном основании 1 смонтирован опорный ролик 31 для взаимодействия с криволинейным пазом 32 плиты 33. Вал 21 кривошипа 6 связан с электромеханическим приводом 5.
В кинематической цепи устройства угол установки кривошипов 6 и 12 центральных ползунных механизмов равен нулю (фиг. 3), поэтому при синхронном вращении упомянутых кривошипов обеспечивается совмещение интервалов прямых и обратных ходов обоих механизмов во времени.
Устройство типа "рука" для передачи изделий работает следующим образом.
При работе привода 5 вал 21 с закрепленными на нем кривошипом 6 и шкивом 19 совершает вращательное движение, которое посредством шатуна 7 и зубчатой рейки 8 преобразуется в возвратно-поворотное движение шестерни 9 и жестко соединенного с ней основания 1, сопряженного с ползуном 14 механизма 11, несущего выходные звенья 15 и 16 с губками для захвата изделий.
Вращение шкива 19 посредством гибкого элемента 22 и шкива 20 передается кривошипу 12, при вращении которого ползун 14 посредством шатуна 13 совершает возвратно-поступательное движение вдоль основания 1. Движения ползуна 14 трансформируются в поворотные движения выходных звеньев 15 и 16 с выстоями заданной продолжительности относительно основания 1, при этом губки 3 выполняют аналогичные поворотные движения.
При взаимодействии роликов 29 и 30 выходных звеньев 15 и 16 с концевыми участками 25 и 26 боковин ползуна 14 обеспечиваются поворотные движения губок 3, а при взаимодействии со средними участками боковин - выстой губок. Началу прямого хода устройства соответствует его положение в позиции загрузки изделий, при котором основание 1 и ползун 14 механизма 11 находятся в своих крайних положениях, соответствующих границам интервалов их прямых и обратных ходов. При этом губки 3 раскрыты для приема и последующего захвата изделия(ий).
В интервале прямого хода устройства выполняются операции захвата изделия, последующего его переноса в позицию установки, сброса или укладки. Весь интервал условно можно разделить на три части: начальную, среднюю и конечную. В начальной части, т.е. при взаимодействии роликов 23 и 24 с концевым участком ползуна 14 в направлении от вершины к основанию конуса, губки 3 сжимаются и захватывают изделие. В средней части, т.е. при взаимодействии роликов 29 и 30 с канавками 27 и 28 на боковинах ползуна 14 губки 3, находясь в сжатом положении, удерживают изделие, переносимое по дугообразной траектории. В концевой части, т. е. при взаимодействии роликов 29 и 30 с другим конусным участком ползуна 14 в направлении от основания к вершине конуса, губки 3 разжимаются и перестают удерживать изделие, переданное из одной позиции в другую. При выполнении обратного хода устройства описанные действия губок повторяются без изделия.
При работе устройства ролик 31 взаимодействует с дугообразным пазом 32 плиты 33, исключая прогиб и вибрации основания.
Выполнение устройства дня передачи изделий в виде совокупности кинематически связанных рычажно-зубчатого механизма и многозвенного исполнительного механизма, построенного на базе дополнительного кривошипно-ползунного механизма, с ползуном которого сопряжены выходные звенья с губками для захвата изделий, позволяет расширить технологические возможности использования устройства и повысить его производительность.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2176592C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179108C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265509C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265510C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ПРЕДМЕТОВ | 1999 |
|
RU2154569C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224639C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2266192C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2193963C1 |
| МАШИНА ДЛЯ УКЛАДКИ В ТАРУ ИЗДЕЛИЙ УДЛИНЕННОЙ ФОРМЫ | 2001 |
|
RU2176973C1 |


Изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, применяемым при обслуживании машин и средств различного целевого назначения. Устройство содержит подвижное основание, исполнительный механизм с губками для захвата изделий, механизм поворота подвижного основания и привод. Исполнительный механизм выполнен в виде многозвенного механизма с выходными звеньями, на которых закреплены губки для захвата изделий. Механизм поворота основания выполнен в виде рычажно-зубчатого механизма, выходное звено которого жестко соединено с упомянутым основанием. При этом ведущие звенья механизма поворота основания и исполнительного механизма кинематически связаны между собой. Кинематическая связь выполнена в виде двух шкивов и гибкого элемента. Изобретение позволит повысить точность функционирования исполнительного механизма, расширить диапазон передаваемых объектов манипулирования. 13 з.п.ф-лы, 4 ил.
W = 3•n-2•p5-p4=3•8-2•10-2=2,
где W - число степеней свободы выходных звеньев;
n - число подвижных звеньев, n = 8;
р5 - число низших кинематических пар, р5 = 10;
р4 - число высших кинематических пар, р4 = 2.
где d - диаметр делительной окружности шестерни;
S - максимальный ход ползуна кривошипно-ползунного механизма;
β - полный угол размаха подвижного основания;
9. Устройство по п.2 или 6, отличающееся тем, что кривошипно-ползунный механизм выполнен в виде центрального механизма, для которого S = 2r, где S - максимальный ход ползуна, r - длина кривошипа.
| КРАЙНЕВ А.Ф | |||
| Словарь-справочник по механизмам | |||
| - М.: Машиностроение, 1987, с.9 и 10 | |||
| Механическая рука | 1982 |
|
SU1110623A1 |
| SU 1293022 A2, 28.02.1987 | |||
| US 5885052 A, 23.03.1999 | |||
| Способ производства твердого сычужного сыра | 2018 |
|
RU2716400C2 |

