Предлагаемое изобретение относится к комбинированным многозвенным механизмам со сложным движением выходных звеньев, применяемым для выполнения вспомогательных операций при обслуживании машин, станков, прессов, устройств различного целевого назначения. Такие манипуляционные механизмы, имитируя определенные движения рук человека, обеспечивают захват изделия (объекта манипулирования), его перемещение из одной позиции в другую, освобождение изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С. 9 и 10, рис. а - прототип). Данное устройство является средством того же назначения, что и предлагаемое изобретение.
Основными недостатками данного устройства являются усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами-автоматами и линиями высокой производительности.
Задачей настоящего изобретения является упрощение привода и повышение производительности устройства.
Решение поставленной задачи достигается тем, что в устройстве типа "рука" для передачи изделий, содержащем комбинированный механизм, выполненный в виде подвижного основания, исполнительного механизма с ведущим звеном и губками для захвата изделий, механизма поворота подвижного основания, включающего ведущее звено, и привода, исполнительный механизм выполнен в виде пятизвенного механизма с выходными звеньями, на которых закреплены губки для захвата изделий, а механизм поворота подвижного основания выполнен в виде шарнирного четырехзвенника, выходное звено которого жестко соединено с подвижным основанием, при этом ведущие звенья механизма поворота основания и исполнительного механизма кинематически связаны между собой.
Шарнирный четырехзвенник выполнен в виде кривошипно-коромыслового механизма, с выходным звеном в виде коромысла, а соотношение длин звеньев упомянутого механизма определено из следующего выражения:
1+λ
где λ1- относительная длина кривошипа;
λ2- относительная длина шатуна;
λ3- относительная длина коромысла;
λ1= r/d, λ2= l/d, λ3= b/d;
r, l, b - длина соответственно кривошипа, шатуна, коромысла;
d - расстояние между центрами вращения кривошипа и качания коромысла.
Пятизвенный механизм содержит кривошипно-ползунный механизм, с ползуном которого взаимодействуют выходные звенья с губками для захвата изделий.
Кинематическая связь ведущих звеньев механизма поворота подвижного основания и исполнительного механизма выполнена в виде шкивов и гибкого элемента, при этом шкивы смонтированы на валу кривошипа и оси качания коромысла механизма поворота.
Подвижное основание шарнирно связано с осью качания выходного звена механизма поворота подвижного основания, а жесткое соединение последнего с упомянутым выходным звеном выполнено, по крайней мере, в двух местах.
Выходные звенья исполнительного механизма с губками для захвата изделий смонтированы шарнирно на оси, жестко укрепленной на подвижном основании.
Ведущее звено исполнительного механизма выполнено в виде кривошипа, смонтированного на оси качания выходного звена механизма поворота подвижного основания, при этом кривошип и смонтированный на оси шкив жестко соединены между собой и установлены с возможностью вращения.
Кривошипно-ползунный механизм в составе пятизвенного исполнительного механизма включает шарнирно связанные кривошип, шатун и ползун, при этом упомянутый механизм выполнен в виде центрального механизма, соответствующего условию S = 2 r, где S - максимальный ход ползуна; r - длина кривошипа.
Ползун кривошипно-ползунного механизма выполнен в виде призмы со сквозным прямоугольным отверстием по длине для сопряжения ее с поворотным основанием, при этом призма имеет ушко для шарнирной связи ее с шатуном.
Концевые участки боковин призмы имеют конусность, при этом на всей длине боковин выполнены открытые продольные пазы для сопряжения призмы с выходными звеньями исполнительного механизма.
Устройство снабжено плитой с криволинейным пазом и опорным роликом, смонтированным на подвижном основании и расположенным в упомянутом пазу.
Интервалы прямых и обратных ходов механизма поворота подвижного основания и исполнительного механизма совмещены во времени.
Свободный конец подвижного основания снабжен съемным наконечником с осью для сопряжения с выходными звеньями, расположенной перпендикулярно продольной оси основания.
Заявляемое устройство отличается от прототипа сочетанием конструктивных элементов и наличием связи между элементами, обеспечивающей отбор мощности на механизм поворота подвижного основания и исполнительный механизм от одного электромеханического привода. Предложенная связь конструктивных элементов и взаимное расположение элементов в сочетании обеспечивают упрощение конструкции привода, возможность быстродействия устройства и соответствующего повышения его производительности.
Выполнение устройства в виде совокупности, включающей подвижное основание, исполнительный механизм и механизм поворота подвижного основания, в которой ведущие звенья упомянутых механизмов кинематически связаны между собой, обеспечивает решение задачи совершенствования прототипа в части упрощения привода и повышения производительности.
Выбор шарнирного четырехзвенника с соотношением длин звеньев 1+λ
Выполнение исполнительного механизма в виде пятизвенного рычажно-кулачкового механизма, построенного на базе центрального кривошипно-ползунного механизма, также имеет преимущества. Удовлетворяя первому условию работоспособности, т.е. структурной формуле кинематической цепи W = 3•n - 2•p5 - p4 = 3•4 - 2•5 -1 = 1, ползун такого механизма выполняет функцию кулачка, совершающего возвратно-поступательное движение, с которым взаимодействуют выходные звенья, оснащенные губками для захвата изделий. Здесь W - степень подвижности выходного звена, n - число подвижных звеньев, p5 - число низших кинематических пар, p4 - число высших кинематических пар. Продольные пазы в боковинах ползуна, с которыми посредством роликов взаимодействуют выходные звенья с губками, являются рабочими профилями кулачка. В зависимости от профилей пазов можно обеспечить тот или иной закон движения губок. Кроме того, при технологической необходимости можно обеспечить движение каждой из губок по своему закону.
Гибкая связь между механизмом повороты подвижного основания и исполнительным механизмом с губками для захвата изделий обеспечивает синхронность движения их ведущих звеньев и упрощает отбор мощности от одного электромеханического привода.
Шарнирная связь подвижного основания с осью качания выходного звена механизма поворота основания и его жесткое соединение с выходным звеном как минимум в двух местах обеспечивают жесткость соединения, исключают упругие деформации выходного звена и непосредственно основания. Это повышает точность функционирования устройства.
Шарнирная связь выходных звеньев исполнительного механизма с подвижным основанием дает возможность губкам для захвата изделий совершать сложное движение: возвратно-поворотное вместе с подвижным основанием и возвратно-поворотное с выстоями относительно основания. Повороты относительно основания обеспечиваются посредством ползуна.
Выполнение ведущего звена исполнительного механизма в виде кривошипа имеет два равнозначных варианта исполнения: 1) жестко соединенные между собой кривошип и шкив гибкой связи смонтированы шарнирно на неподвижной оси выходного звена механизма поворота подвижного основания; 2) жестко соединенные между собой кривошип и шкив гибкой связи жестко закреплены на оси выходного звена механизма поворота, установленной с возможностью вращения. Для обоих вариантов характерна простота исполнения, при этом необходимо обеспечить консольную установку кривошипа, т.е. установку на конце оси, не контактирующем с плоскостью движения шатуна.
Кривошипно-ползунный механизм, на базе которого создан пятизвенный исполнительный механизм, является центральными механизмом, в котором ход ползуна однозначно зависит от длины кривошипа, а интервалы прямого и обратного ходов ползуна равны. Это предельно упрощает совмещение циклов движения исполнительного механизма и механизма поворота подвижного основания.
При выполнении ползуна в виде призмы с прямоугольным отверстием по длине для сопряжения с поворотным основанием исключается возможность разворота ползуна относительно продольной оси основания при движении ползуна. Для технологичности изготовления и сборки призму можно выполнить разъемной по длине, состоящей из двух симметричных частей. Форма и размеры ушка для шарнирной связи призмы с шатуном не являются лимитирующими.
Конусность на концевых участках призмы, взаимодействующей с выходными звеньями при ее движении в начале и конце прямого хода, обеспечивает соответственно "схват" изделия губками и "освобождение" изделия, а в начале и конце обратного хода - соответственно "сжатие" и "разжатие" губок без изделия. На границах интервалов прямого и обратного ходов призмы губки занимают исходное, т.е. разжатое положение.
Наличие опорного ролика на подвижном основании, взаимодействующего с фигурным пазом неподвижной плиты, уменьшает консоль в креплении основания относительно оси его качания и способствует уменьшению упругих деформаций основания, возможных при значительных массах объектов манипулирования. В результате повышается жесткость основания и точность функционирования устройства.
Совмещение ходов во времени обеспечивает такую работу устройства, при которой механизм поворота и исполнительный механизм одновременно начинают одноименный ход и в одно время его заканчивают, начало и окончание одноименных ходов обоих механизмов совпадает во времени. Такое совмещение достигается благодаря тому, что упомянутые механизмы являются центральными, а их ведущие звенья совершают синхронное движение.
Использование съемного наконечника обеспечивает технологичность сборки и разборки ползуна и подвижного основания при неразъемном выполнении ползуна.
Предлагаемое устройство типа "рука" для передачи изделий поясняется фиг. 1 - 4 .
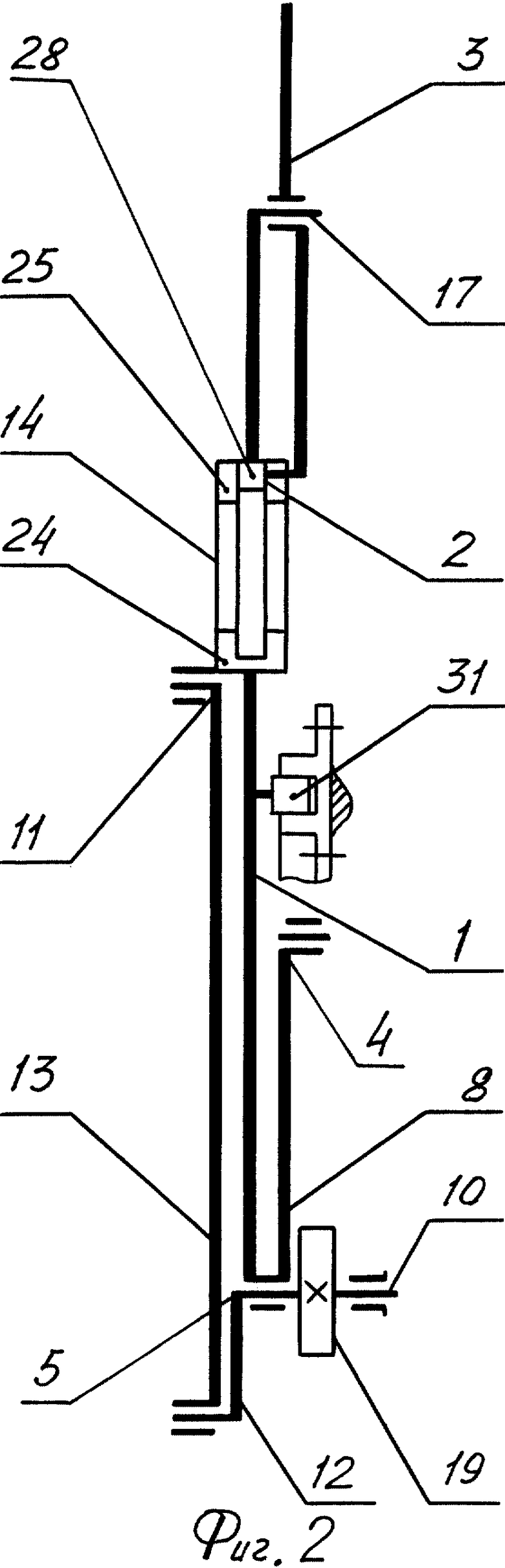
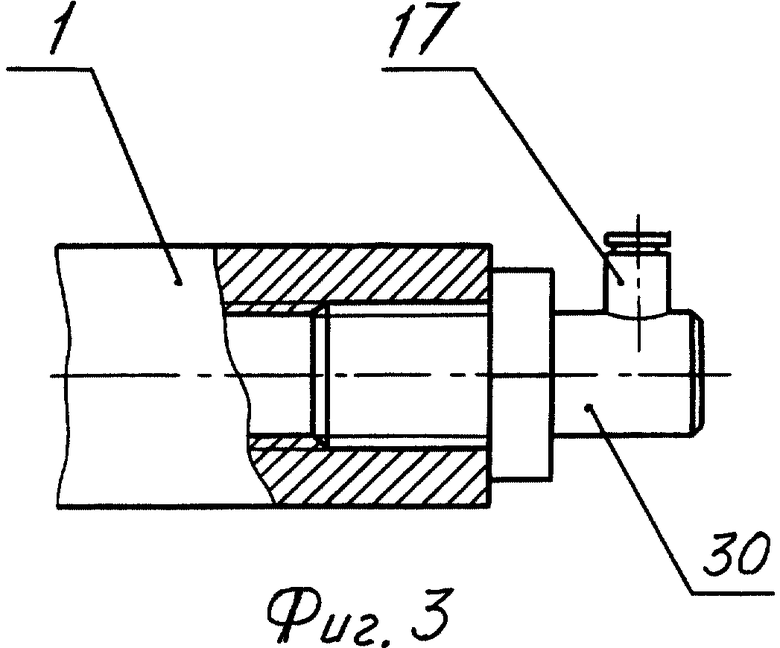
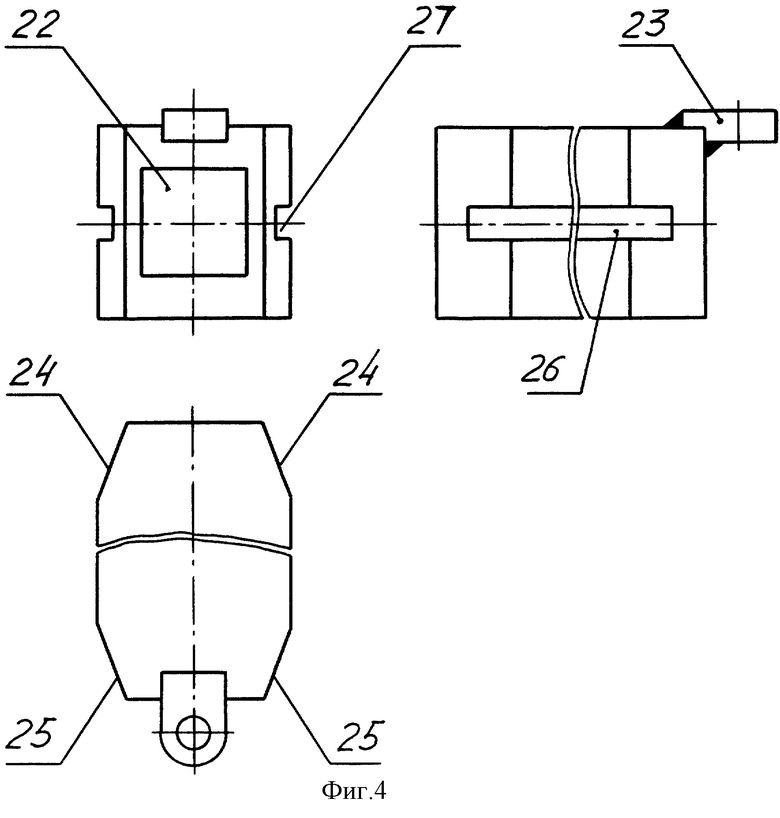
На фиг. 1 изображена кинематическая схема устройства; на фиг. 2 - то же, вид сбоку; на фиг. 3 - наконечник в сборе; на фиг. 4 - ползун.
Устройство содержит подвижное основание 1, исполнительный механизм 2 с губками 3 для захвата изделий, механизм 4, который обеспечивает возвратно-поворотное движение упомянутого основания 1, и привод 5.
Механизм 4 включает шарнирно связанные кривошип 6, шатун 7, выходное звено 8 и стойку 9, при этом с выходным звеном жестко соединено подвижное основание 1, которое для повышения жесткости может иметь дополнительную шарнирную связь с осью 10 качания выходного звена 8. Длины звеньев механизма 4 соответствуют выражению (1).
Исполнительный механизм 2 выполнен в виде пятизвенного механизма, который включает кривошипно-ползунный механизм 11, состоящий из кривошипа 12, шатуна 13 и ползуна 14, и выходные звенья 15 и 16 с губками 3 для захвата изделий, взаимодействующие с ползуном 14. При этом кривошип 12 смонтирован на оси 10 качания выходного звена механизма 4, ползун 14 сопряжен с основанием 1, а выходные звенья 15 и 16 смонтированы шарнирно на оси 17, жестко закрепленной на основании 1.
Кинематическая связь кривошипов 6 и 12 механизмов 4 и 2 содержит шкивы 18 и 19, смонтированные соответственно на валу 20 кривошипа 6 и на оси качания 10 выходного звена 8, и гибкий элемент 21 для передачи вращения по схеме: вал 20 кривошипа 6 - шкив 19, смонтированный на оси 10.
Ползун 14 кривошипно-ползунного механизма выполнен в виде призмы (фиг. 4) со сквозным прямоугольным отверстием 22 по длине для сопряжения ее с основанием 1. Призма снабжена ушком 23 для шарнирной связи ее с шатуном 13. Концевые участки 24 и 25 боковин призмы имеют конусность, а по длине боковин выполнены открытые продольные пазы 26 и 27 для сопряжения призмы и выходными звеньями 15 и 16 посредством роликов 28 и 29.
Свободный конец подвижного основания 1 снабжен съемным наконечником 30 (фиг. 3) с осью 17 для шарнирной связи с выходными звеньями 15 и 16, расположенной перпендикулярно продольной оси основания. Сопряжение съемного наконечника с подвижным основанием обеспечиваются посредством резьбового соединения.
Кривошип 12 жестко соединен со шкивом 19, смонтированным на оси 10 качания выходного звена 8 механизма 4, при этом обеспечено консольное крепление кривошипа на конце упомянутой оси.
На подвижном основании 1 смонтирован опорный ролик 31 для взаимодействия с криволинейным пазом 32 плиты 33. Вал 20 кривошипа 6 связан с электромеханическим приводом 5.
Угол установки кривошипов 6 и 12 соответственно механизмов 4 и 2 равен нулю, поэтому при синхронном вращении упомянутых кривошипов обеспечивается совпадение границ прямых и обратных ходов обоих механизмов.
Устройство типа "рука" для передачи изделий работает следующим образом.
При работе привода 5 вал 20 с закрепленным на нем кривошипом 6 совершает вращательное движение, которое посредством шатуна 7 преобразуется в возвратно-поворотное движение выходного звена 8, состоящее из прямых и обратных ходов. Синхронно с выходным звеном 8 возвратно-поворотное движение совершает основание 1, несущее ползун 14 и выходные звенья 15 и 16 с губками для захвата изделий.
Вращение вала 20 посредством шкивов 18 и 19 и гибкого элемента 21 передается кривошипу 12, при вращении которого ползун 14 посредством шатуна 13 совершает возвратно-поступательное движение вдоль основания 1. Движение ползуна 14 трансформируется в поворотные движения выходных звеньев 15 и 16 с выстоями заданной продолжительности, при этом губки 3 выполняют аналогичные поворотные движения.
При взаимодействии роликов 28 и 29 выходных звеньев 15 и 16 с концевыми участками 24 и 25 боковин ползуна 14 обеспечиваются поворотные движения губок 3, а при взаимодействии со средними участками боковин - выстои губок. Началу прямого хода устройства соответствует его положение в позиции загрузки изделий, при котором выходное звено 8 механизма 4, основание 1 и ползун 14 механизма 11 находятся в своих крайних положениях, соответствующих границам интервалов их прямых и обратных ходов. При этом губки 3 раскрыты для приема и последующего захвата изделия(ий).
В интервале прямого хода устройства выполняются операции захвата изделия и последующего его переноса в позицию установки, сброса или укладки. Весь интервал условно можно разделить на три части: начальную, среднюю и конечную. В начальной части, т.е. при взаимодействии роликов 28 и 29 с конусным участком ползуна 14 в направлении от вершины к основанию, губки 3 сжимаются и захватывают изделие. В средней части, т.е. при взаимодействии роликов 28 и 29 с пазами 26 и 27 на параллельных боковинах ползуна 14, губки 3, находясь в сжатом состоянии удерживают изделие, переносимое по дугообразной траектории. В концевой части, т.е. при взаимодействии роликов 28 и 29 с другим конусным участком ползуна 14 в направлении от основания к вершине, губки 3 разжимаются и перестают удерживать изделие, переданное из одной позиции в другую. При выполнении обратного хода устройства описанные движения губок повторяются без изделия, т.е. губки имитируют движение при отсутствии изделия.
При работе устройства ролик 31 взаимодействует с дугообразным пазом 32 плиты 33, исключая прогиб и вибрации основания.
Выполнение устройства для передачи изделий в виде совокупности кинематически связанных шарнирного четырехзвенника и пятизвенного рычажно-кулачкового механизма, построенного на базе кривошипно-ползунного механизма, с ползуном которого сопряжены выходные звенья, снабженные губками для захвата изделий, упрощает привод и позволяет повысить производительность.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2177404C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179108C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ПРЕДМЕТОВ | 1999 |
|
RU2154569C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2193963C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 1999 |
|
RU2164860C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265509C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2172240C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179505C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2266192C1 |
Изобретение относится к многозвенным комбинированным механизмам со сложным движением выходных звеньев, которые применяются при обслуживании машин, станков, прессов, устройств различного целевого назначения. Устройство содержит подвижное основание, исполнительный механизм с губками для захвата изделий, механизм поворота подвижного основания и привод. Исполнительный механизм выполнен в виде пятизвенного механизма с выходными звеньями, на которых закреплены губки для захвата изделий. Пятизвенный механизм содержит кривошипно-ползунный механизм, включающий шарнирно связанные кривошип, шатун и ползун. Механизм поворота подвижного основания выполнен в виде шарнирного четырехзвенника, выходное звено которого жестко соединено с подвижным основанием. При этом ведущие звенья механизма поворота основания и исполнительного механизма кинематически связаны между собой. Кинематическая связь выполнена в виде шкивов и гибкого элемента. Изобретение отличается простотой привода и позволит повысить производительность. 12 з.п. ф-лы, 4 ил.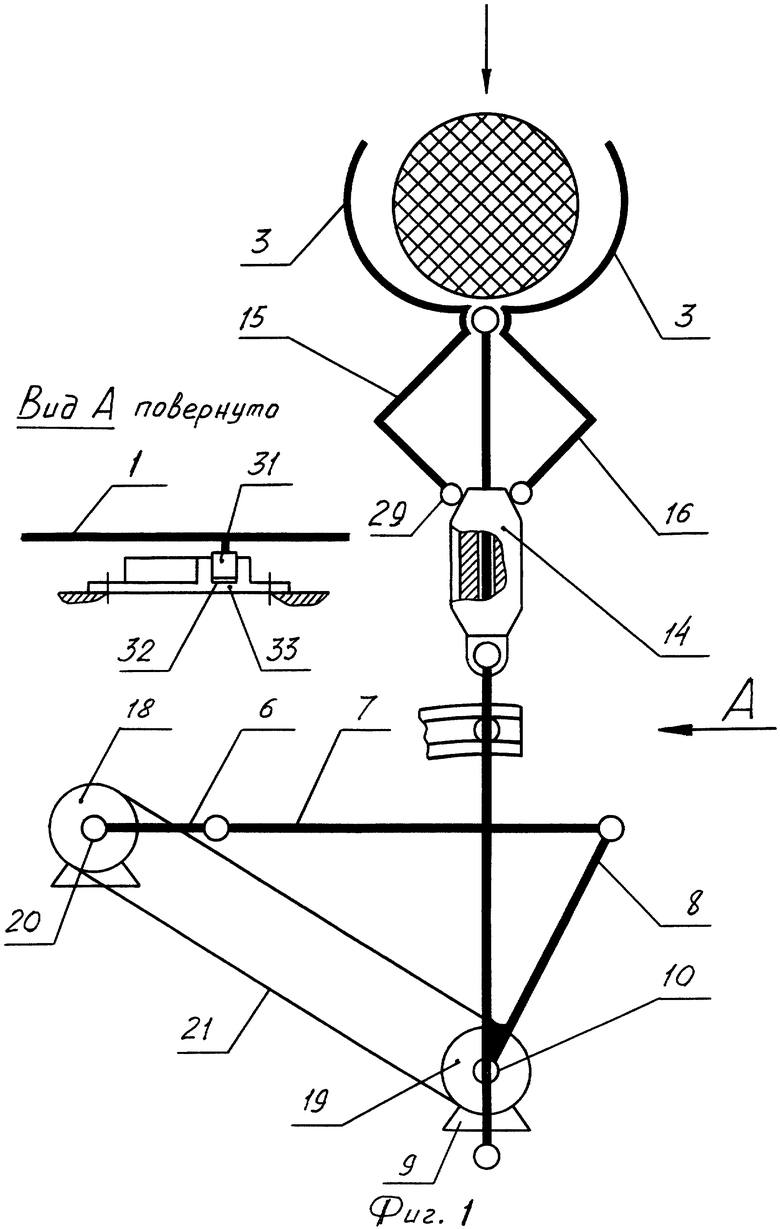
1+λ
где λ1 - относительная длина кривошипа;
λ2 - относительная длина шатуна;
λ3 - относительная длина коромысла;
λ1= r/d, λ2= l/d, λ3= b/d;
r, l, b - длина соответственно кривошипа, шатуна, коромысла;
d - расстояние между центрами вращения кривошипа и качания коромысла.
| КРАЙНЕВ А.Ф | |||
| Словарь-справочник по механизмам | |||
| - М.: Машиностроение, 1987, с.9-10 | |||
| Механическая рука | 1982 |
|
SU1110623A1 |
| SU 1293022 А2, 28.02.1987 | |||
| US 5885052 А, 23.03.1999 | |||
| Способ производства твердого сычужного сыра | 2018 |
|
RU2716400C2 |
