Изобретение относится к области навигации и представляет собой аппаратуру счисления координат (АСК) наземного транспортного средства (НТС).
Известно множество реализаций АСК для транспортных средств на море, в воздухе и на суше. При геодезической подготовке районов в геологии, строительстве, в войсках широко используются топопривязчики. Топопривязчик представляет собой автомобиль (например, УАЗ-39621-01, в кузове которого установлена навигационная и другая (вспомогательная) аппаратура), предназначенный для определения прямоугольных координат отдельных точек, вождения колонн техники и т.п.
АСК топопривязчика [1] см.фиг.1 состоит из устройства съема пути с передних колес 1, курсовой системы 2, вычислительного устройства 3, блока ввода начальных координат 4, индикаторных суммирующих устройств - счетчиков 5, 6, причем вращение передних колес с помощью гибкого вала передается на первый вход вычислительного устройства 3, выход курсовой системы 2 соединен (электрически) со вторым входом вычислительного устройства 3; вычислительное устройство 3, в качестве которого используется курсопрокладчик КП-4 (1В44) [2] , раскладывает поступающий путь (угол вращения передних колес) на координатные составляющие и в виде вращения выходных валов  передает в индикаторные суммирующие устройства 5 и 6 соответственно, на вторые входы которых из блока ввода начальных координат 4 поступают значения координат начальной точки маршрута движения (ХН и YН), показания индикаторных устройств (в данном случае счетчиков) представляют собой сумму начальных координат и накопленных приращений координат, т.е. являются значениями текущих координат местоположения НТС.
передает в индикаторные суммирующие устройства 5 и 6 соответственно, на вторые входы которых из блока ввода начальных координат 4 поступают значения координат начальной точки маршрута движения (ХН и YН), показания индикаторных устройств (в данном случае счетчиков) представляют собой сумму начальных координат и накопленных приращений координат, т.е. являются значениями текущих координат местоположения НТС.
Поскольку скорость вращения гибкого вала (скорость вращения передних колес) пропорциональна скорости движения НТС, то счисляемые координаты в любой момент времени равны:
где  X+jY - комплексное представление прямоугольных координат,
X+jY - комплексное представление прямоугольных координат,
ωK - угловая скорость вращения колеса,
AV - направление скорости движения НТС, вырабатываемое КС,
m - масштабный коэффициент, переводящий ωK в VНТС или угол - в S, ωX - в VX, ωУ - VY.
Для обеспечения счисления координат при движении топопривязчика по маршруту необходимо в начальной точке маршрута ввести в индикаторные суммирующие устройства 5, 6, представляющие собой механические счетчики, координаты начальной точки, а в механический вычислитель - курсопрокладчик ввести угол направления продольной оси машины на начальной точке, определяемый курсовой системой (гирокомпасом). После этого начинается движение, во время которого устройство съема пути приводит во вращение входной вал курсопрокладчика, где его вращение раскладывается на составляющие: ωK•cosAV и ωK•sinAV, и валы, вращающиеся с такими скоростями, приводят во вращение входные валы счетчиков (индикаторов), в которых установлены координаты начальной точки, реализуя таким образом сложение начальных координат с приращением координат из-за движения топопривязчика.
Изобретение направлено на повышение точности счисления координат за счет устранения погрешности счисления координат, обусловленной закручиванием гибкого вала в канале пути, изменениями "эффективного" радиуса колеса НТС, "уходами" оси НТС от направления скорости движения НТС, а также для расширения применимости АСК за счет обеспечения работы АСК без съема информации о движении НТС с помощью механического контакта движителей НТС с поверхностью земли.
Сущность изобретения заключается в том, что в АСК, включающую курсовую систему, вычислитель, блок ввода начальных координат и два суммирующих устройства, причем выход курсовой системы соединен с входом вычислителя, выходы которого по координатам соединены с первыми входами соответствующих сумматоров, вторые входы которых соединены с соответствующими выходами блока ввода начальных координат, для повышения точности счисления координат введены электрическая передача информации о пути, для чего в АСК введен механический датчик скорости (МДС) - преобразователь угла поворота колес в две последовательности электрических импульсов одной частоты, пропорциональной угловой скорости вращения колес или скорости движения НТС, причем импульсы одной последовательности сдвинуты во времени относительно импульсов другой последовательности, а также блок выработки знака движения - движения передним или задним ходом, на входы которого поступают выходные сигналы МДС и выход которого соединен через схему ИЛИ с соответствующим входом вычислителя для управления его работой; блок доплеровских датчиков скорости, состоящий из трех однолучевых доплеровских датчиков скорости (ДДС), формирующих сигналы, частоты которых пропорциональны проекциям скорости НТС на направления их излучения, и блок комплексирования датчиков скорости, при этом соответствующие входы блока комплексирования датчиков скорости соединены с выходами соответствующих однолучевых ДДС и с первым выходом МДС, а выход соединен с путевыми входами вычислителя по продольной и поперечной скорости; блок выработки сигнала "Стоянка-ХОД", вход которого соединен с первым выходом МДС, а выход через вторую схему ИЛИ - с управляющим входом блока доплеровских датчиков скорости для выключения излучения однолучевых ДДС на стоянке; датчик линейных ускорений НТС, второй блок выработки сигнала "Стоянка-ХОД" и второй блок выработки знака движения, при этом выход датчика ускорений соединен с входами вторых блоков выработки сигнала "Стоянка-ХОД" и знака движения, выходы которых соединены с вторыми входами первой и второй схем ИЛИ соответственно.
Сущность изобретения поясняется графическими материалами, где на фиг.1 приведена блок-схема АСК-прототипа, на фиг.2 - блок-схема заявляемой АСК, на фиг.3 - схема блока комплексирования датчиков скорости.
Заявляемая АСК широкого применения включает в свой состав курсовую систему 1, устройство съема пути 2, вычислитель 3, блок ввода начальных координат 4 и сумматоры 5, 6, причем выход курсовой системы 1 соединен с соответствующим входом вычислителя, выходы вычислителя 3 по приращениям координат соединены с первыми входами сумматоров 5, 6, вторые входы которых соединены с соответствующими выходами блока ввода начальных координат 4, а выходы являются выходами АСК, механический датчик скорости 7, блоки знака движения 8, 16, первую схему ИЛИ 9, а также блок доплеровских датчиков скорости 10, блок комплексирования датчиков скорости 11, блоки выработки сигнала "Стоянка-ХОД" 12, 15, вторую схему ИЛИ 13 и датчик линейных ускорений 14, при этом устройство съема пути 2 соединено жестким валом с входным валом механического датчика скорости 7, первый выход которого соединен с входом первого блока выработки сигнала "Стоянка-ХОД" 12, с первым входом первого блока знака движения 8 и с соответствующим входом блока комплексирования датчиков скорости 11, второй выход механического датчика скорости 7 соединен со вторым входом первого блока знака движения 8, выход которого соединен с первым входом первой схемы ИЛИ 9, выход которой соединен с соответствующим входом вычислителя 3; выходы однолучевых ДДС блока доплеровских датчиков скорости 10 соединены с соответствующими входами блока комплексирования датчиков скорости 11, выходы которого по продольной и поперечной скорости соединены с соответствующими входами вычислителя 3, вход блока доплеровских датчиков скорости 10 по сигналу управления излучением соединен с выходом первого блока выработки сигнала "Стоянка-ХОД" 12 через схему ИЛИ 13, выход датчика линейных ускорений 14 соединен с входами второго блока выработки сигнала "Стоянка-ХОД" 15 и второго блока знака движения 16, выходы которых соединены с вторыми входами схем ИЛИ 13 и 9 соответственно.
Блок доплеровских датчиков скорости 10 конструктивно может представлять собой один прибор, содержащий в себе три однолучевых ДДС (10-1, 10-2, 10-3), углы посылки сигналов которых относительно продольной и поперечной осей НТС равны:  соответственно, но может представлять и комплект из трех отдельных приборов. Конкретная конструкция определяется условиями размещения на НТС.
соответственно, но может представлять и комплект из трех отдельных приборов. Конкретная конструкция определяется условиями размещения на НТС.
Блок комплексирования датчиков скорости 11 осуществляет функции выделения сигналов о проекциях скорости НТС на его продольную и поперечную оси (VПР и VП) из сигналов однолучевых ДДС 10-1 и 10-2, 10-1 и 10-3 соответственно, кроме того, он осуществляет разделение использования сигналов о продольной скорости (VПР) от ДДС и МДС по величине скорости движения и по дорожным условиям по правилу: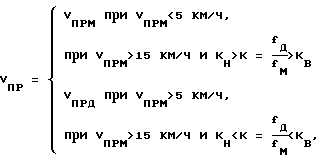
КН.В - нижнее и верхнее допустимые значения отношения частот ДДС к МДС;
VПРM - показания о VПР механического датчика скорости;
VПРД - показания о VПР ДДС, а при VПР=VПРД осуществляет подстройку показаний МДС до значения VПРД и переводит импульсы сигналов VП и VПР в приращения пути умножением на их "цены" ΔП и ΔПР.
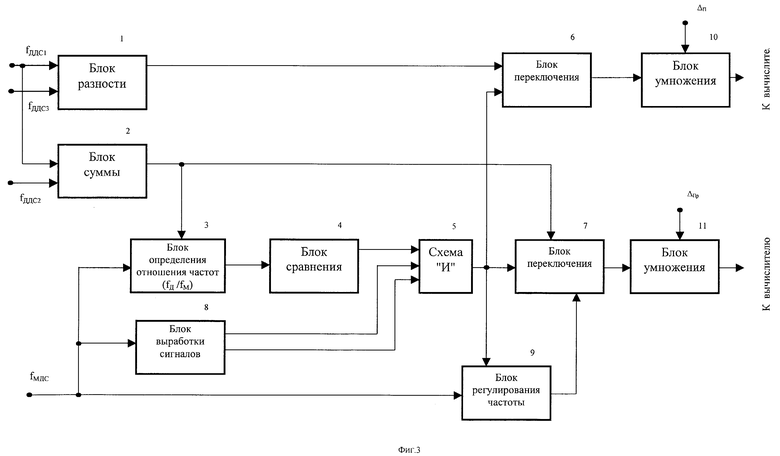
Для обеспечения выполнения этих функций блок комплексирования датчиков скорости (см.фиг.3) содержит блок разности 1, блок суммы 2, блок определения отношения частот 3, блок сравнения 4, схему И 5, два блока переключения 6, 7, блок выработки сигналов  блок регулирования частоты 9 и два блока умножения 10,11, при этом входы блока разности 1 соединены с выходами однолучевых ДДС 10-1 и 10-3 (см.фиг.2), входы блока суммы 2 - с выходами однолучевых ДДС 10-1 и 10-2, выход блока разности 1 (см.фиг.3) соединен с входом первого блока переключения 6, выход которого через блок умножения 10 на "цену импульса" канала поперечной скорости соединен с соответствующим входом вычислителя, входы блока определения отношения частот 3 соединены с выходом блока суммы 2 и выходом МДС 7 (см.фиг.2), выход МДС, кроме того, соединен с входом блока выработки сигналов
блок регулирования частоты 9 и два блока умножения 10,11, при этом входы блока разности 1 соединены с выходами однолучевых ДДС 10-1 и 10-3 (см.фиг.2), входы блока суммы 2 - с выходами однолучевых ДДС 10-1 и 10-2, выход блока разности 1 (см.фиг.3) соединен с входом первого блока переключения 6, выход которого через блок умножения 10 на "цену импульса" канала поперечной скорости соединен с соответствующим входом вычислителя, входы блока определения отношения частот 3 соединены с выходом блока суммы 2 и выходом МДС 7 (см.фиг.2), выход МДС, кроме того, соединен с входом блока выработки сигналов  (см. фиг. 3) и с входом блока регулирования частоты 9, выход блока определения отношения частот 3 соединен с входом блока сравнения 4, выход которого соединен с первым входом схемы И 5, второй и третий входы схемы И 5 соединены с выходами блока выработки сигналов
(см. фиг. 3) и с входом блока регулирования частоты 9, выход блока определения отношения частот 3 соединен с входом блока сравнения 4, выход которого соединен с первым входом схемы И 5, второй и третий входы схемы И 5 соединены с выходами блока выработки сигналов  а выход - с управляющими входами первого и второго блока переключения, первый вход второго блока переключения 7 соединен с выходом блока суммы 2, а второй - с выходом блока регулирования частоты 9, выход же через блок умножения на "цену импульса" канала VПР соединен с соответствующим входом вычислителя.
а выход - с управляющими входами первого и второго блока переключения, первый вход второго блока переключения 7 соединен с выходом блока суммы 2, а второй - с выходом блока регулирования частоты 9, выход же через блок умножения на "цену импульса" канала VПР соединен с соответствующим входом вычислителя.
Вычислитель 3 (см. фиг. 2) по сигналу КС о величине угла направления продольной оси НТС в геодезической системе координат (АПР) формирует значение cosAПР и sinAПР и передает их в вычислители приращений координаты Х от VПР и координаты Y от VП, а также в вычислители приращения координаты Y от VПР и координаты Х от VП соответственно, выходы вычислителей приращения координаты Х от VПР и VП суммируются и с выхода вычислителя поступают на сумматор 5, а выходы вычислителей приращений координаты Y от VПР и VП тоже суммируются и с выхода вычислителя поступают на сумматор 6.
Работа данной аппаратуры в части определения координат одинакова с АСК-прототипом, но поскольку курсовая система реально определяет положение продольной оси НТС, а не направление движения, то работа АСК-прототипа сопровождается соответствующими погрешностями. Введение в АСК блока доплеровских датчиков скорости 10 позволяет, с одной стороны, увеличить точность определения VПР, а с другой стороны, определить VП, что позволяет учесть "сносовое" движение. Обусловлено это тем, что каждый однолучевой ДДС вырабатывает сигнал, частота которого пропорциональна проекции скорости движения на направление посылки сигнала (на направление оси его диаграммы направленности) [3, с.319], [4, с.7-13]:
что позволяет представить частоту в функции проекции вектора скорости на оси НТС (продольную, поперечную и вертикальную):
Здесь: V - скорость движения,
λ - длина волны излучаемого сигнала, косинус угла между V и осью диаграммы направленности однолучевого ДДС,
косинус угла между V и осью диаграммы направленности однолучевого ДДС,
α, β, γ - направляющие углы, задающие положение оси диаграммы направленности в системе координат, связанной с НТС.
Учитывая, что однолучевой ДДС определяет модуль доплеровского сдвига частоты и определенные ранее углы посылки сигналов для однолучевых ДДС на выходах блока суммы и блока разности 11, получим частоты:
что позволяет суммировать приращение координат от обоих составляющих скорости, соотношение между которыми в зависимости от условий движения изменяется.
Заявляемая аппаратура предназначена для использования на транспортных средствах с опорой на поверхность земли через движители и через воздушную подушку, т. к. датчик линейных ускорений позволяет определять моменты трогания с места и реверса движения.
Кроме того, подобная АСК может размещаться в контейнере, храниться в нем и вместе с ним оперативно устанавливаться для использования в работе на транспортное средство или его прицеп.
В качестве датчика линейных ускорений могут использоваться акселерометры, применяемые в гироскопических приборах КС для контроля за горизонтированием.
Предложенное решение АСК действительно увеличивает точность счисления координат и расширяет ее применимость по сравнению с прототипом.
Источники информации
1. Топопривязчик. Техническое описание и инструкция по эксплуатации. БИ2.511.011 ТО.
2. Курсопрокладчик КП-4 (1В44). Техническое описание и инструкция по эксплуатации. БИ2.511.004 ТО.
3. Селезнев В.П. Навигационные устройства, М.: Машиностроение, 1974.
4. Флеров А.Г., Тимофеев В.Т. Доплеровские устройства и системы навигации, М.: Транспорт, 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ ПО ДВУМ СОСТАВЛЯЮЩИМ СКОРОСТИ | 2000 |
|
RU2184348C2 |
| КОМПЛЕКСНАЯ АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ | 2001 |
|
RU2195632C2 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ С КОМПЕНСАЦИЕЙ ПОГРЕШНОСТИ ОТ ВРАЩЕНИЯ АГРЕГАТА | 2000 |
|
RU2173834C1 |
| КОМПЛЕКСИРОВАННЫЙ ДОПЛЕРОВСКИЙ МОДУЛЬ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2213981C2 |
| ДОПЛЕРОВСКИЙ ДАТЧИК ПРИРАЩЕНИЙ ПУТИ С УСТРОЙСТВОМ СТЕНДОВОЙ КАЛИБРОВКИ | 2003 |
|
RU2246737C1 |
| КОМПЛЕКСИРОВАННЫЙ ДОПЛЕРОВСКИЙ МОДУЛЬ | 2001 |
|
RU2212686C2 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ С АВТОМАТИЧЕСКОЙ КОРРЕКЦИЕЙ ПОКАЗАНИЙ | 2000 |
|
RU2184349C1 |
| ДУБЛИРОВАННЫЙ ДАТЧИК ПРОЕКЦИЙ СКОРОСТИ ОТНОСИТЕЛЬНО ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2003 |
|
RU2246738C1 |
| ДАТЧИК ПРОЕКЦИЙ ВЕКТОРА СКОРОСТИ С УГЛОВОЙ КАЛИБРОВКОЙ | 2009 |
|
RU2422836C2 |
| КОМПЛЕКСНАЯ СПУТНИКОВАЯ НАВИГАЦИОННАЯ АППАРАТУРА | 2005 |
|
RU2294527C1 |

Изобретение относится к области навигации наземных транспортных средств. Аппаратура счисления координат широкого применения содержит курсовую систему, устройство съема пути, вычислитель, блок ввода начальных координат, два суммирующих устройства, механический датчик скорости, два блока знака движения, две схемы ИЛИ, блок доплеровских датчиков скорости, блок комплексирования датчиков скорости, два блока выработки сигнала "Стоянка-ход" и датчик линейных ускорений. Курсовая система, первая схема ИЛИ и блок комплексирования датчиков скорости соединены с вычислителем. Суммирующие устройства соединены с блоком ввода начальных координат, а выходы суммирующих устройств являются выходами аппаратуры счисления координат. Устройство съема пути соединено с механическим датчиком скорости. Механический датчик скорости соединен с блоком комплексирования датчиков скорости, с первым блоком выработки знака движения и первым блоком выработки сигнала "Стоянка-ход". Блок доплеровских датчиков скорости соединен с блоком комплексирования датчиков скорости. Датчик линейных ускорений соединен со вторым блоком знака движения и вторым блоком выработки сигнала "Стоянка-ход". Выходы обоих блоков выработки сигнала "Стоянка-ход" соединены с соответствующими входами второй схемы ИЛИ, выход которой соединен с входом управления блока доплеровских датчиков. Выходы обоих блоков знака движения соединены с соответствующими входами первой схемы ИЛИ. Технический результат состоит в повышении точности счисления координат и в расширении области применения аппаратуры счисления координат. 3 ил.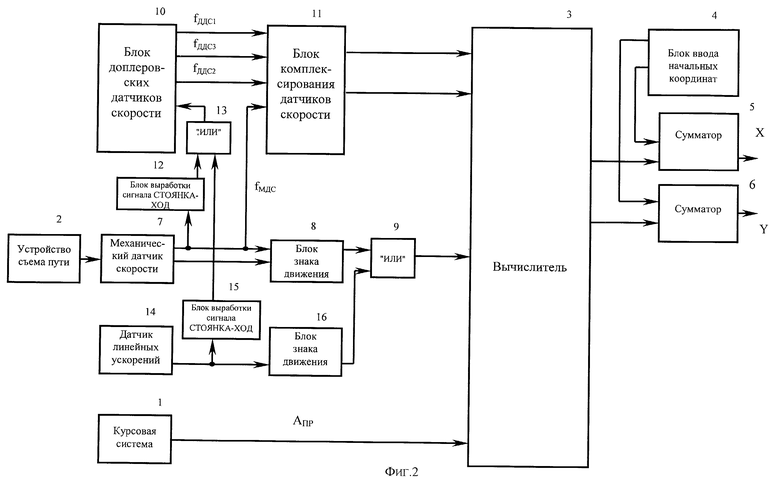
Аппаратура счисления координат широкого применения, включающая курсовую систему, устройство съема пути, вычислитель, блок ввода начальных координат и два суммирующих устройства, причем выход курсовой системы соединен с соответствующим входом вычислителя, выходы которого по приращениям координат Х и Y соединены с первыми входами соответствующих суммирующих устройств, вторые входы которых соединены с соответствующими выходами блока ввода начальных координат, а выходы являются выходами аппаратуры счисления координат, отличающаяся тем, что в нее введены механический датчик скорости, первый и второй блоки знака движения, первая и вторая схемы ИЛИ, блок доплеровских датчиков скорости, блок комплексирования датчиков скорости, первый и второй блоки выработки сигнала "Стоянка-ход", датчик линейных ускорений, при этом выходной вал устройства съема пути соединен с входным валом механического датчика скорости, выходы блока доплеровских датчиков скорости соединены с соответствующими входами блока комплексирования датчиков скорости, выходы которого по продольной и поперечной скорости соединены с соответствующими входами вычислителя, первый выход механического датчика скорости соединен с соответствующим входом блока комплексирования датчиков скорости и с входами первого блока выработки знака движения и первого блока выработки сигнала "Стоянка-ход", а второй выход, сигнал которого сдвинут относительно сигнала, первого во времени, соединен со вторым входом первого блока знака движения, выход датчика линейных ускорений соединен с входами второго блока знака движения и второго блока выработки сигнала "Стоянка-ход", выходы обоих блоков выработки сигнала "Стоянка-ход" соединены соответственно с первым и вторым входами второй схемы ИЛИ, выход которой соединен с входом управления блока доплеровских датчиков, выходы обоих блоков знака движения соединены соответственно с первым и вторым входами первой схемы ИЛИ, выход которой соединен с соответствующим входом вычислителя.
| Топопривязчик | |||
| Техническое обслуживание и инструкция по эксплуатации | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ КОРРЕКЦИИ И НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ СЧИСЛЕНИЯ ПУТИ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2151379C1 |
| Навигационный счислитель координат | 1989 |
|
SU1820218A1 |
| DE 3033279 A1, 08.04.1982 | |||
| Устройство для определения координат | 1989 |
|
SU1753275A1 |
| УСТРОЙСТВО АВТОНОМНОЙ КОРРЕКЦИИ | 1999 |
|
RU2161296C1 |
| СПОСОБ ЗАКАЛКИ СТАЛЬНЫХ ДЕТАЛЕЙ | 0 |
|
SU314806A1 |

