Изобретение относится к машиностроению, в частности к механизмам, создающим точное прямолинейное движение.
Известен механизм с точным прямолинейным движением звена [смотри А.Ф. Крайнев, Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - 183 с. ] , недостатком которого является то, что это движение обеспечивается направляющим звеном, присутствующим в схеме механизма, на котором возникает паразитная реакция.
Наиболее близким по сути является планетарный механизм, содержащий неподвижное центральное колесо, водило и сателлит [смотри А.Ф. Крайнев, Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - 356 с.], создающий точное прямолинейное движение точек на сателлите без направляющей, недостатком которого является жесткая геометрическая зависимость радиусов колес от эксцентриситета водила, ограничивающая его использование в машинах и являющаяся причиной невозможности установки более одного сателлита в схеме.
Технический результат - расширение возможности использования механизма в различных машинах.
Это достигается тем, что в отличие от планетарного механизма, имеющего один сателлит, не более, с радиусом, равным эксцентриситету водила, и неподвижное центральное колесо с радиусом, равным двум эксцентриситетам водила, предлагаемый механизм дополнительно снабжен блоком замыкающих колес, несколькими сателлитами, колесом, жестко соединенным с водилом, и подвижным центральным колесом, жестко соединенным в блок с центральным колесом, причем радиус центрального колеса меньше двух эксцентриситетов водила, каждый сателлит, образующий внутреннее зацепление с центральным колесом, соединен с водилом и имеет радиус, меньший эксцентриситета водила, колесо связано через блок замыкающих колес с подвижным центральным колесом, а блок центральных колес имеет угловую скорость, равную при 0<Δ<Е,
при 0<Δ<Е,
где Δ=Е-R3 и Δ=2•Е-R1;
Е - эксцентриситет водила;
R1 - радиус центрального колеса;
R3 - радиус сателлита;
W1 - угловая скорость центрального колеса;
W2 - угловая скорость водила.
На фиг. 1 изображен предлагаемый механизм. Он содержит водило, блок центральных колес, сателлиты и блок замыкающих колес. На водиле 2 закреплены с эксцентриситетом Е оси сателлитов 3. Блок центральных колес 1-1' состоит из двух жестко соединенных колес внутреннего зацепления, одно из которых - 1 образует зацепление с несколькими сателлитами, расположенными на водиле, другое - 1' через зацепление с колесом 5' блока замыкающих колес 5-5' и зацепление колеса 5' с колесом 4, жестко соединенном с водилом, образует замкнутый контур блока центральных колес с сателлитами.
Механизм работает следующим образом. При вращении водила 2 через оси с эксцентриситетом Е приводятся в движение сателлиты 3. В тоже время через колесо 4, жестко соединенное с водилом 2, через блок замыкающих колес 5-5' движение передается колесу 1', образующему в жестком соединении блок центральных колес с колесом 1. Окружная скорость в зацеплении колеса 1 с сателлитами и окружная скорость вращения осей сателлитов задают угловую скорость сателлитов, равную по величине, но противоположно направленную относительно водила, при которой на сателлитах появляются точки с точным прямолинейным движением. Таким образом, кинематика сателлитов образуется от сложения кинематики водила и центрального колеса. Радиус сателлита, меньший эксцентриситета водила, позволяет установить несколько сателлитов (на всех фигурах показаны два сателлита, но может быть и больше), каждый из которых имеет точки, совершающие точное прямолинейное движение.
На фиг.1 приведен план скоростей точек на звеньях механизма, где:
VВ - скорость оси вращения сателлита, положение которой определяется эксцентриситетом Е;
VA - скорость точки А, совершающей точное прямолинейное движение;
VC - скорость точки С, направленная для создания мгновенного центра скоростей т. О;
VД - скорость точки контакта колес 4 и 5;
VK - скорость точки контакта колес 5' и 1';
точка О - мгновенный центр скоростей всех точек на сателлите 3.
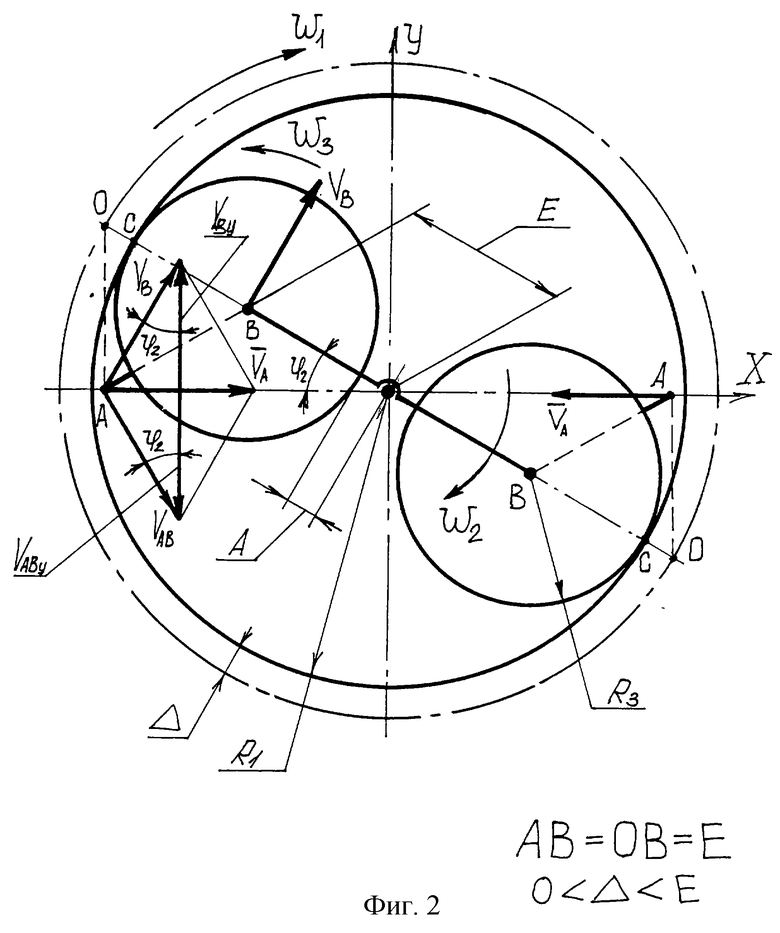
На фиг. 2 показано, что скорость точки А на сателлите 3 складывается из векторов двух скоростей:
VA=VB+VAB,
где VAB - скорость вращения т. А относительно т. В.
В проекциях на оси X-Y это выражение запишется так:
VAX=VBX+VABX;
VAY=VBY-VABY,
где VAX - проекция скорости VA на ось X;
VBX - проекция скорости VB на ось X;
VABX - проекция скорости VAB на ось X;
VAY - проекция скорости VA на ось Y;
VBY - проекция скорости VB на ось Y;
VABY - проекция скорости VAB на ось Y.
Точка А будет совершать точное прямолинейное движение в том случае, если VAY=0. Это возможно, если VBY=-VABY. Из фиг.2 следует:
VBY=W2•E•Cos(ϕ);
-VABY=-W3•E•Cos(ϕ),
таким образом должно выполнятся равенство W3=-W2.
При этом т. А движется со скоростью
VA=VAX=2•E•W2•Sin(ϕ)
или
VA=W2•OA,
т.к. ОА=2•E•Sin(ϕ).
Очевидно, что т. О является мгновенным центром скоростей всех точек сателлита.
Для т. С запишем:
VC=W3•Δ
или
VС=W1•R1=W1•(2•E-Δ).
Используя условие прямолинейного движения т. А W3=-W2, получаем требуемую частоту и направление вращения центрального колеса 1: .
.
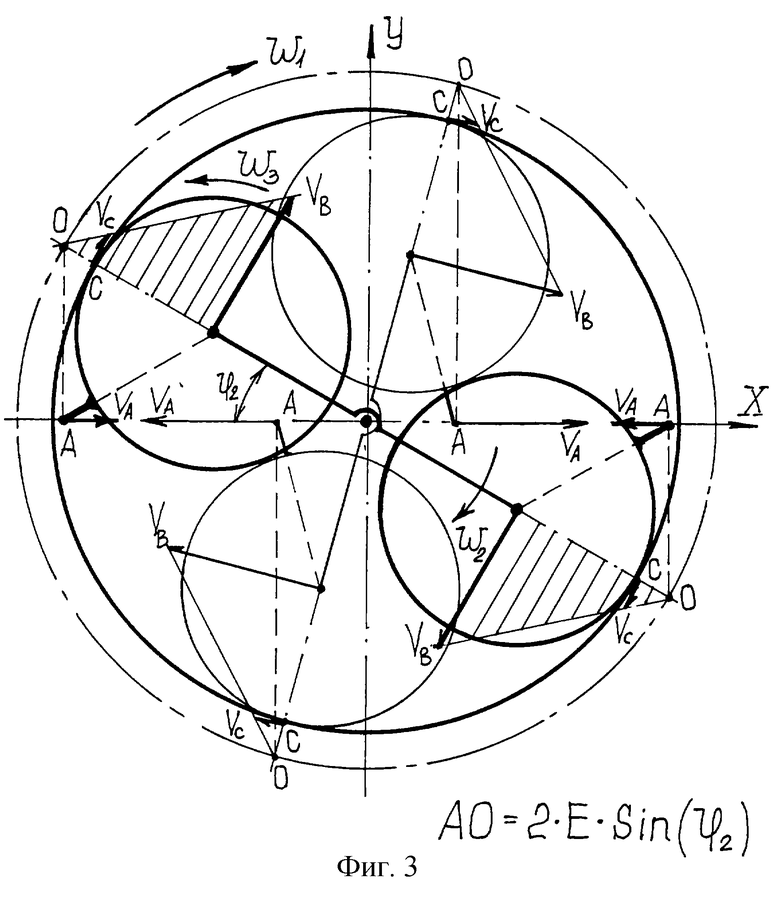
На фиг.3 показаны несколько положений мгновенного центра скоростей т. О и точек А, В, С.
Следовательно, точка А может двигаться точно прямолинейно со скоростью VA при подвижном центральном колесе также как и в прототипе.
Предлагаемое решение обладает новизной, изобретательским уровнем и промышленной применимостью.
Изобретение относится к машиностроению. Многосателлитный дифференциал с точным прямолинейным движением точек на сателлитах снабжен подвижным центральным колесом с радиусом, меньшим двух эксцентриситетов водила, дополнительными колесами и дополнительно несколькими сателлитами, образующими внутреннее зацепление с центральным колесом. Каждый сателлит имеет радиус, меньший эксцентриситета водила. Центральное колесо имеет скорость вращения, при которой скорости вращения сателлитов и водила принимают равную, но противоположную величину, заставляя точки на сателлите двигаться точно прямолинейно без направляющей. Технический результат - расширение возможности использования механизма в различных машинах. 3 ил.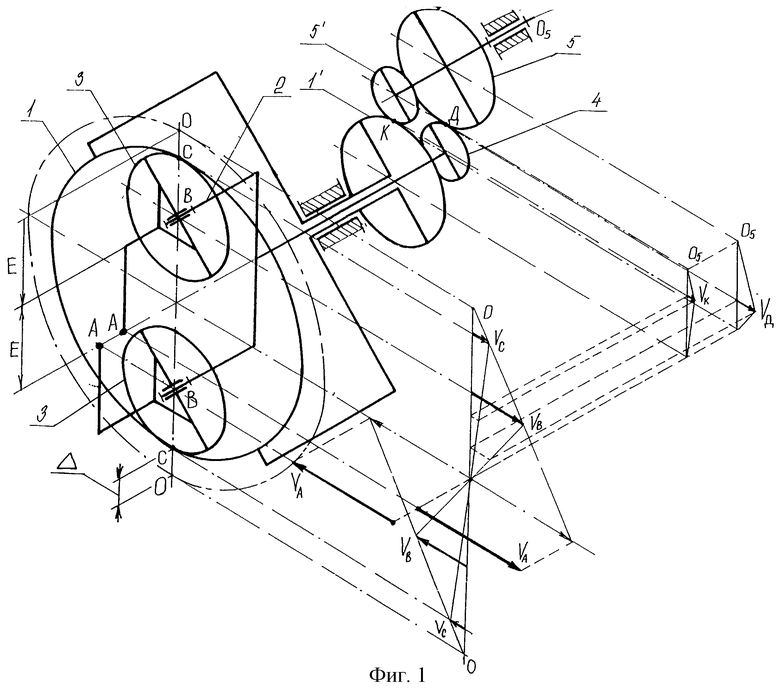
Многосателлитный дифференциал, содержащий центральное колесо, водило и сателлит, отличающийся тем, что он дополнительно снабжен блоком замыкающих колес, несколькими сателлитами, колесом, жестко соединенным с водилом, и подвижным центральным колесом, жестко соединенным в блок с центральным колесом, причем радиус центрального колеса меньше двух эксцентриситетов водила, каждый сателлит, образующий внутреннее зацепление с центральным колесом, соединен с водилом и имеет радиус, меньший эксцентриситета водила, колесо связано через блок замыкающих колес с подвижным центральным колесом, а блок центральных колес имеет угловую скорость, равную при 0<Δ<Е,
при 0<Δ<Е,
где Δ= E-R3 или Δ= 2•Е-R1;
Е - эксцентриситет водила;
R1 - радиус центрального колеса;
R3 - радиус сателлита;
W1 - угловая скорость центрального колеса;
W2 - угловая скорость водила,
при которой скорости вращения сателлитов и водила становятся равными, но противоположно направленными.
| ЗАМКНУТЫЙ ДИФФЕРЕНЦИАЛ С ТОЧКОЙ ТОЧНОГО ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ | 1994 |
|
RU2125195C1 |
| МЕХАНИЗМ ТОЧНОГО ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ ТОЧКИ | 1992 |
|
RU2102644C1 |
| КРАЙНЕВ А.Ф | |||
| Словарь-справочник по механизмам | |||
| - М.: Машиностроение, 1987, с.183 | |||
| КРАЙНЕВ А.Ф | |||
| Словарь-справочник по механизмам | |||
| - М.: Машиностроение, 1987, с.356. | |||
