Изобретение относится к области машиностроения, в частности к созданию точного прямолинейного движения точки.
Известен механизм точного прямолинейного движения точки [1] недостатком которого является то, что для обеспечения точного прямолинейного движения ползуна необходимо дополнительное направляющее звено, вызывающее реакцию между ползуном и направляющим звеном.
Наиболее близким по сути является планетарный механизм, содержащий неподвижное центральное колесо, водило и сателлит [2] недостатком которого является ограниченное его использование в силовых машинах из-за жесткой связи между диаметром сателлита и радиусом водила, применение высокопрочных материалов, а в зубчатых передачах коррегирование колес при малых эксцентриситетах водила.
Цель изобретения расширение возможности использования механизма в различных машинах.
Поставленная цель достигается тем, что в предлагаемом устройстве увеличен размер сателлита без изменения эксцентриситета водила (радиус Е./, а неподвижное центральное колесо делается подвижным и дополняется жестко связанным с ним дополнительным центральным колесом, которое через дополнительное колесо, жестко связанное с водилом, и объединяющее их еще одно дополнительное колесо с собственной опорой, обеспечивает такой же баланс скоростей, как в планетарном механизме, при этом точке контакта сателлита с основным центральным колесом сообщается скорость вращения противоположного направления скорости вращения водила и имеющая величину
при R3=E получаем ω10, т.е. известную схему планетарного механизма.
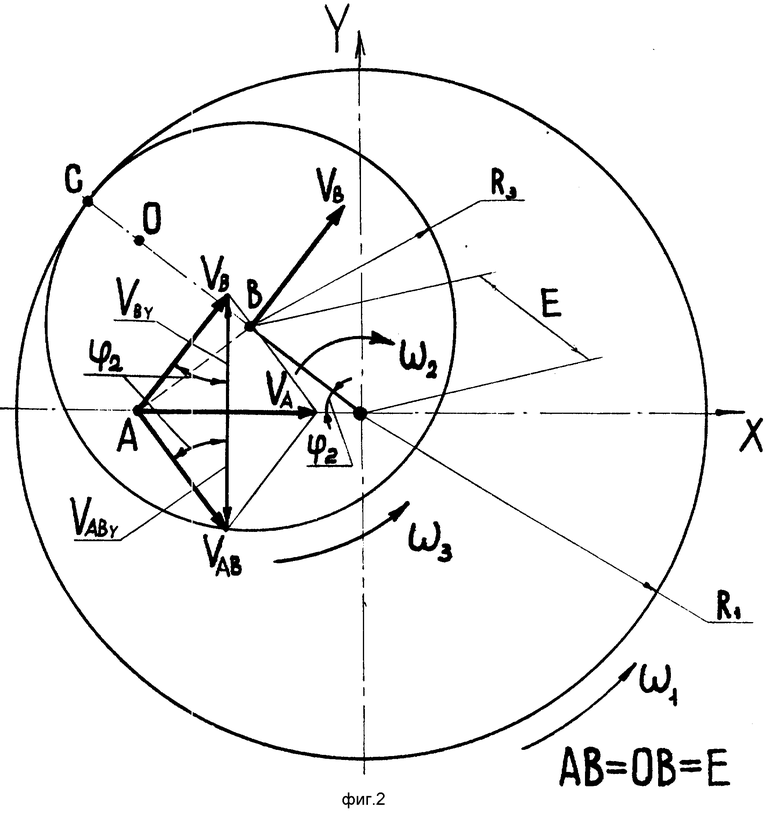
На фиг. 2 показано, что скорость точки A на сателлите 3 складывается из векторов двух скоростей
В проекциях на оси X-Y это выражение запишется так:
VAx=VBx+VABx; VAy=VBy-VABy.
Точка A будет совершать точное прямолинейное движение в том случае, если VAy=0. Это возможно если VBy=-VABy. 1 Из фиг.2 следует:
таким образом должно выполняться равенство ω3= -ω2.
При этом т. A движется со скоростью
VA=VAx=2EW2•sin ( ϕ2 )
или VA= ω2•OA т.к. OA = 2E•sin(ϕ2).
Очевидно, что т. О является мгновенным центром скоростей всех точек сателлита. Для т. С запишем
VC= VCO= ω3•CO = ω3(R3-E)
или
VC= ω1R1= ω1(R3+E).
Используя условие прямолинейного движения т. A ω3= -ω2получаем требуемую частоту и направление вращения центрального колеса 1:
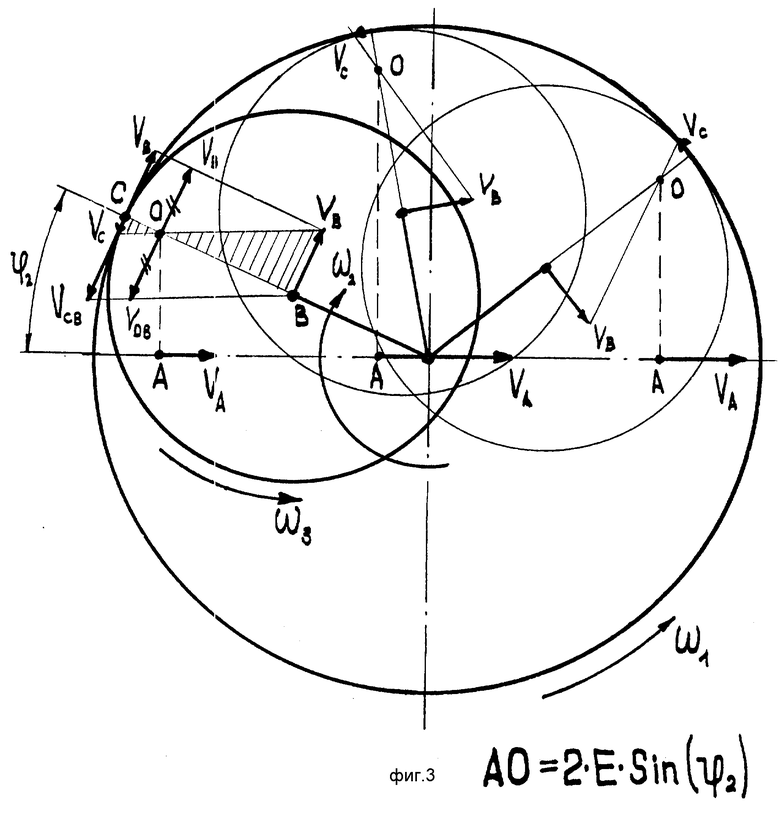
На фиг.3 показаны несколько положений мгновенного центра скоростей т. О и точек A, B, C.
Следовательно, точка A может двигаться точно прямолинейно со скоростью VA как при неподвижном центральном колесе, так и при подвижном, когда сателлит имеет диаметр больше радиуса колеса 1.
На фиг.1 в изометрии изображен предлагаемый механизм, состоящий из блока центральных подвижных колес 1-1', где 1 основное центральное колесо, а 1' -дополнительное центральное колесо, а также из водила 2 в блоке с дополнительным колесом 4, сателлита 3 и дополнительного колеса 5 с опорой для соединения кинематической связью колес 5 и 1'.
Механизм работает следующим образом: при вращении водила 2 через ось с эксцентриситетом E приводится в движение сателлит 3, а через дополнительное колесо 4, связанное жестко с водилом, дополнительное колесо 5 и дополнительное колесо 1' задается угловая скорость бока центральных колес 1-1'. При этом окружная скорость в зацеплении будет направлена противоположно окружной скорости оси сателлита, соединенного с водилом, что обеспечивает для сателлита такую картину линейных скоростей его точек, в которой имеется мгновенный центр скоростей, а точки, отстояние от оси сателлита на эксцентриситет E, движущиеся точно прямолинейно.
На фиг. 1 приведен план скоростей точек на звеньях механизма, где Vв скорость оси вращения сателлита, положение которой определяется эксцентриситетом E. Точка O это мгновенный центр скоростей всех точек на сателлите 3. VA скорость точки A, совершающей точно прямолинейное движение. VC скорость точки C, направленная в обратную сторону для создания мгновенного центра скоростей 0. VD скорость контакта колес 4 и 5, Vк скорость контакта колес 1' и 5.
Предлагаемое решение обладает новизной, изобретательским уровнем и промышленной применимостью.
Возможности применения механизма расширяется наличием двух валов 2 и 4, имеющих разные скорости вращения, каждый из которых может быть приводным валом.
При этом можно использовать следующую расчетную формулу:

Из формул видно, что подбором радиусов звеньев можно получить различную частоту вращения вала 5 по сравнению с частотой вращения водила 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАМКНУТЫЙ ДИФФЕРЕНЦИАЛ С ТОЧКОЙ ТОЧНОГО ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ | 1994 |
|
RU2125195C1 |
| МНОГОСАТЕЛЛИТНЫЙ ДИФФЕРЕНЦИАЛ С ТОЧНЫМ ПРЯМОЛИНЕЙНЫМ ДВИЖЕНИЕМ ТОЧЕК НА САТЕЛЛИТАХ | 1998 |
|
RU2196265C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ С КИНЕМАТИЧЕСКИМ ПРИНЦИПОМ СОЗДАНИЯ ТОЧНОГО ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ ТОЧКИ НА ОХВАТЫВАЮЩЕМ САТЕЛЛИТЕ | 1998 |
|
RU2196264C2 |
| ПЛАНЕТАРНЫЙ ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 2000 |
|
RU2172879C1 |
| Мотор-колесо | 1989 |
|
SU1703504A1 |
| Педальный привод (варианты) | 2016 |
|
RU2651314C1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА С РЕГУЛИРУЕМЫМ ПЕРЕДАТОЧНЫМ ОТНОШЕНИЕМ | 2019 |
|
RU2712714C1 |
| Рабочее оборудование роторного экскаватора с инерционной разгрузкой | 1990 |
|
SU1754849A1 |
| ЦИКЛОИДНАЯ ПЕРЕДАЧА С ТЕЛАМИ КАЧЕНИЯ | 2012 |
|
RU2497030C1 |
| Устройство для намотки ленточныхМАгНиТОпРОВОдОВ | 1979 |
|
SU853683A1 |
Использование: машиностроение. Сущность изобретения: механизм содержит основное и дополнительное центральные колеса, водило, сателлит, дополнительные колеса, предназначенные для соединения с водилом и для связи его с дополнительным центральным колесом. Сателлит выполнен диаметром большим, чем радиус центрального колеса. Сателлит установлен на водиле с возможность вращения со скоростью, равной противоположно направленной скорости водила и отличной от скорости дополнительного центрального колеса. Точки сателлита, отстоящие от его оси на величину эксцентриситета водила, имеют возможность совершать точное прямолинейное перемещение. 3 ил.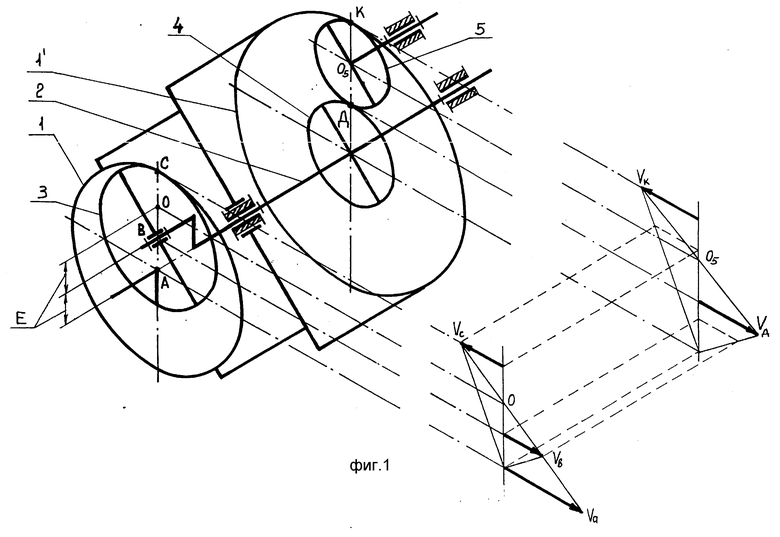
Механизм точного прямолинейного движения точки, содержащий центральное колесо, водило и сателлит, отличающийся тем, что он снабжен жестко связанным с основным дополнительным центральным колесом, которое установлено в механизме с возможностью вращения, и дополнительными колесами, из которых одно жестко соединено с водилом, другое установлено на валу для связи водила с дополнительным центральным колесом, а сателлит выполнен диаметром большим, чем радиус взаимодействующего с ним центрального колеса, и установлен на водиле с возможностью вращения со скоростью, равной и противоположной направленной скорости водила и отличной от скорости дополнительного центрального колеса, при которой точки сателлита, относящие от его оси на величину эксцентриситета водила, имеют возможность совершать точное прямолинейное перемещение.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Крайнев А.Ф | |||
| Словарь-справочник по механизмами | |||
| - М.: Машиностроение, 1987, с | |||
| Переносная мусоросжигательная печь-снеготаялка | 1920 |
|
SU183A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Крайнев А.Ф | |||
| Словарь-справочник по механизмам | |||
| - М.: Машиностроение, 1987, с | |||
| Приспособление для постепенного включения и выключения фрикционных муфт в самодвижущихся экипажах и т.п. | 1919 |
|
SU356A1 |
