Подъемные балки образуют составную часть подвесных перемещаемых составов вагонеток, в частности для подземных горных выработок. С помощью таких подъемных балок можно транспортировать любые грузы, в частности, контейнеры, штучные грузы или даже целые устройства, как, например, рамы для щитовой крепи.
Для этой цели подъемные балки имеют приводимые в действие пневматически, гидравлически или электрически подъемные приводы с двигателем, передачей и подъемной цепью. С помощью подъемных приводов грузы можно принимать, фиксировать для надежной транспортировки, а также снова опускать.
Подъемные приводы снабжены тормозами, которые служат для того, чтобы при отключении энергии привода двигателей подъемные приводы могли фиксировать грузы в любой момент в их положении.
Для того чтобы даже при отключении энергии привода иметь возможность поднимать и опускать грузы, для поддержания режима транспортировки, известна также возможность оснащать подъемные приводы кривошипными рукоятками и тормозами для опускания грузов. Благодаря этим вспомогательным приводам можно контролируемо поднимать и опускать грузы вручную.
Тормоза для опускания грузов, в частности, с блокировочными защелками, требуют, однако, много пространства. Это соответствует практическим требованиям, в частности, подземных горных выработок, лишь относительно. Кроме того, такие тормозные устройства подвержены сравнительно сильному износу. Это, с учетом специальных требований по обеспечению безопасности подземных работ, делает необходимым постоянный контроль и уход за тормозными устройствами. Однако особенности именно подземных горных работ приводят к тому, что постоянный контроль и уход не всегда могут проводиться с надлежащей тщательностью. Следовательно, нельзя исключать, что из-за отсутствия ухода ручной вспомогательный привод при отключении энергии не сработает. Могут возникнуть даже опасные ситуации для обслуживающего подъемную балку персонала, вызванные неконтролируемо опускающимся грузом.
Для того чтобы учитывать возникновение таких проблем, на практике вместо тормозов для опускания грузов применяют многодисковые тормоза. Многодисковые тормоза более надежны в работе по сравнению с тормозами для опускания грузов. Кроме того, они требуют значительно меньшего ухода, так как они, в целом, являются менее изнашиваемыми. Однако многодисковые тормоза в силу их конструкции имеют ту особенность, что при отключении энергии привода, хотя и возможно опускание груза, однако это опускание не может проводиться контролируемо. Скорее грузы опускаются неконтролируемо. Это также вызывает опасности, которые как раз противоречат ужесточенным требованиям безопасности подземных горных работ.
Поднятие вручную грузов при использовании многодисковых тормозов также до настоящего времени невозможно.
Исходя из уровня техники, в основе изобретения поэтому лежит задача создать приводимый в действие пневматически, гидравлически или электрически подъемный привод для установленной с возможностью перемещения по подвесным шинам подъемной балки, который также при использовании многодискового тормоза позволяет производить контролируемое поднятие и опускание груза при отключении энергии привода.
Решение этой задачи обеспечивается согласно изобретению признаками пункта 1 формулы изобретения.
С этой целью продлен проходящий через многодисковый тормоз и его муфту свободного хода концевой участок вала подъемного привода и снабжен на торцевой стороне поводковым углублением для ввода вставной цапфы кривошипной рукоятки. При этом поводковое углубление и вставная цапфа функционально так согласованы друг с другом, что при вращении кривошипной рукоятки в одном направлении - при условии отключения энергии привода - можно успешно поднимать, а при вращении кривошипной рукоятки в другом направлении без проблем контролируемо опускать груз.
В этой связи приданная многодисковому тормозу муфта свободного хода позволяет вручную вращать оператору, обслуживающему подъемный привод, вал подъемного привода и, используя муфту свободного хода, поднимать груз. Многодисковый тормоз остается в положении торможения. Таким образом, при прекращении вращения кривошипной рукоятки многодисковый тормоз в соединении с муфтой свободного хода автоматически обеспечивает фиксацию положения груза в положении достигнутой высоты подъема.
С другой стороны, оператор может при опускании груза целенаправленно уменьшить силу торможения многодискового тормоза так, что обеспечивается равномерное контролируемое опускание. При этом оператор может четко согласовывать прилагаемое им усилие с соответствующим весом груза. Несогласованности этого относительного взаимодействия могут приводить к тому, что груз будет стремиться опускаться быстрее. Тем самым будет как бы опережаться скорость вращения кривошипной рукоятки. Однако такой эффект автоматически приводит к тому, что тогда под действием натяжной пружины многодисковый тормоз снова замыкается. Тем самым оператор вынужден снова согласовать свое усилие при вращении кривошипной рукоятки с весом подлежащего опусканию груза.
Тем самым изобретение соединяет предпочтительным образом известные сами по себе свойства многодискового тормоза в плане надежности, небольшого объема и нетребовательности в уходе с возможностью контролированно поднимать и опускать грузы при отключении энергии привода.
При введении вставной цапфы кривошипной рукоятки в поводковое углубление поводковые пальцы скользят в аксиальных пазах, пока они не упрутся во внутренний конец аксиальных пазов. Если затем кривошипную рукоятку вращать в направлении, противоположном наклонным пазам, то захватывается вал подъемного привода с использованием муфты свободного хода и можно поднимать груз. Если же, наоборот, вращать кривошипную рукоятку в направлении наклонных пазов, то вставная цапфа за счет поводковых пальцев скользит глубже в поводковое углубление. За счет этого комбинированного радиально-аксиального перемещения происходит разгрузка многодискового тормоза, так что груз может опускаться.
Наклонные пазы могут проходить прямо или по винтовой линии. Поводковые пальцы могут выступать за периметр вставной цапфы. Однако они могут быть составной частью пронизывающего поперек вставную цапфу штыря.
Для того чтобы более точно определить положение поводковых пальцев на внутреннем конце аксиальных пазов, там предусмотрены фиксирующие канавки. Тем самым, при достижении поводковыми пальцами внутреннего конца аксиальных пазов поводковые пальцы заходят в фиксирующие канавки и занимают, тем самым, определенное положение, так что можно без помех вращать кривошипную рукоятку.
Изобретение обеспечивает по меньшей мере частичное уменьшение тормозного усилия многодискового тормоза. Для этого вставная цапфа кривошипной рукоятки имеет торцевой нажимной штифт. Этот нажимной штифт при введении поводковых пальцев в наклонные пазы вступает в соприкосновение с торцевой стороной чувствительного штифта, установленного в валу подъемного привода с возможностью аксиального перемещения. Чувствительный штифт, в свою очередь, упирается в поперечный штифт, который установлен в поршне, нагруженном с одной стороны натяжной пружиной, в частности, пакетом тарельчатых пружин, и с другой стороны, - по меньшей мере, опосредованно - энергией привода так, что многодисковый тормоз переводится в положение торможения или выводится из положения торможения, по меньшей мере, с частично уменьшенным усилием торможения. Таким образом, если отсутствует энергия привода, то оператор может за счет комбинированного аксиального и винтового перемещения вставной цапфы перемещать поршень против возвратной силы натяжной пружины так, что тормозное усилие многодискового тормоза, по меньшей мере, частично снимается.
Если для подъемного привода используется приводимый в действие гидравлически двигатель, то для разгрузки многодискового тормоза используется также рабочая жидкость для двигателя. При приводимом в действие пневматически двигателе это будет сжатый воздух. При приводимом в действие электрически двигателе разгрузка может производиться с помощью якорного магнита.
С помощью заявленного изобретения оператор получает возможность определять уровень износа тормозного устройства. Таким образом, если торцевая сторона чувствительного штифта еще находится на достаточном расстоянии от входа отверстия в валу подъемного привода, в котором расположен чувствительный штифт, то такое положение указывает оператору, что тормозное устройство находится в исправном состоянии. Приближение торцевой стороны чувствительного штифта к входу отверстия сигнализирует об увеличивающемся износе, что в конце концов вынуждает оператора принять соответствующие контрмеры непосредственно или опосредованно.
С помощью признаков пункта 3 формулы изобретения можно зафиксировать как нормальное рабочее положение подъемного привода, так и аварийное или вспомогательное положение. Если энергия привода подключена, то рычаг переключения повернут в положение, в котором энергия привода беспрепятственно поступает к двигателю подъемного привода, однако поводковое углубление для любых ручных манипуляций закрыто. Только при отключении энергии привода, например, при обрыве провода, рычаг переключения перемещается так, что больше невозможен подвод энергии привода к двигателю и двигатель может свободно вращаться. Кроме того, с помощью связи рычага переключения с запирающим рычагом освобождается вход поводкового углубления на конечном отрезке вала подъемного привода, так что теперь можно ввести вставную цапфу кривошипной рукоятки в поводковое углубление и возможно приведение в действие подъемного привода вручную. Рычаг переключения и запирающий рычаг представляют собой, предпочтительно, одноплечие рычаги, которые связаны друг с другом через сцепление с кулисным камнем.
Для защиты рычага переключения и запирающего рычага они в соответствии с признаками пункта 4 формулы изобретения закрыты торцевой пластиной. В этой торцевой пластине имеются лишь прорези для введения вставной цапфы кривошипной рукоятки в поводковое углубление, а также для приведения в действие соединенного с рычагом переключения вала, с помощью которого может быть прервана подача энергии к двигателю подъемного привода, так что двигатель затем может вращаться свободно.
Для исключения дополнительных вспомогательных средств согласно пункту 5 формулы изобретения рычаг переключения может поворачиваться с помощью кривошипной рукоятки. Для этого на кривошипной рукоятке, в частности, на аксиальном продолжении поворотной ручки расположено отверстие с внутренним многогранником, который может надеваться на внешний многогранник на валу рычага переключения, так что таким образом рычаг переключения может быть повернут из одного положения в другое.
Изобретение поясняется ниже на примере выполнения с помощью чертежей, на которых изображено:
фиг. 1 - схематичный вид сбоку подвешенной к рельсу подъемной балки с подъемным приводом;
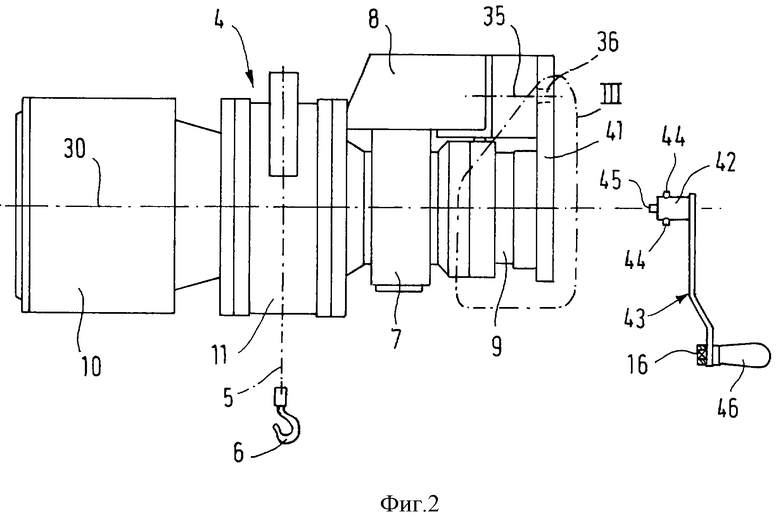
фиг. 2 - схематичный вид спереди в увеличенном масштабе подъемного привода подъемной балки по фиг.1;
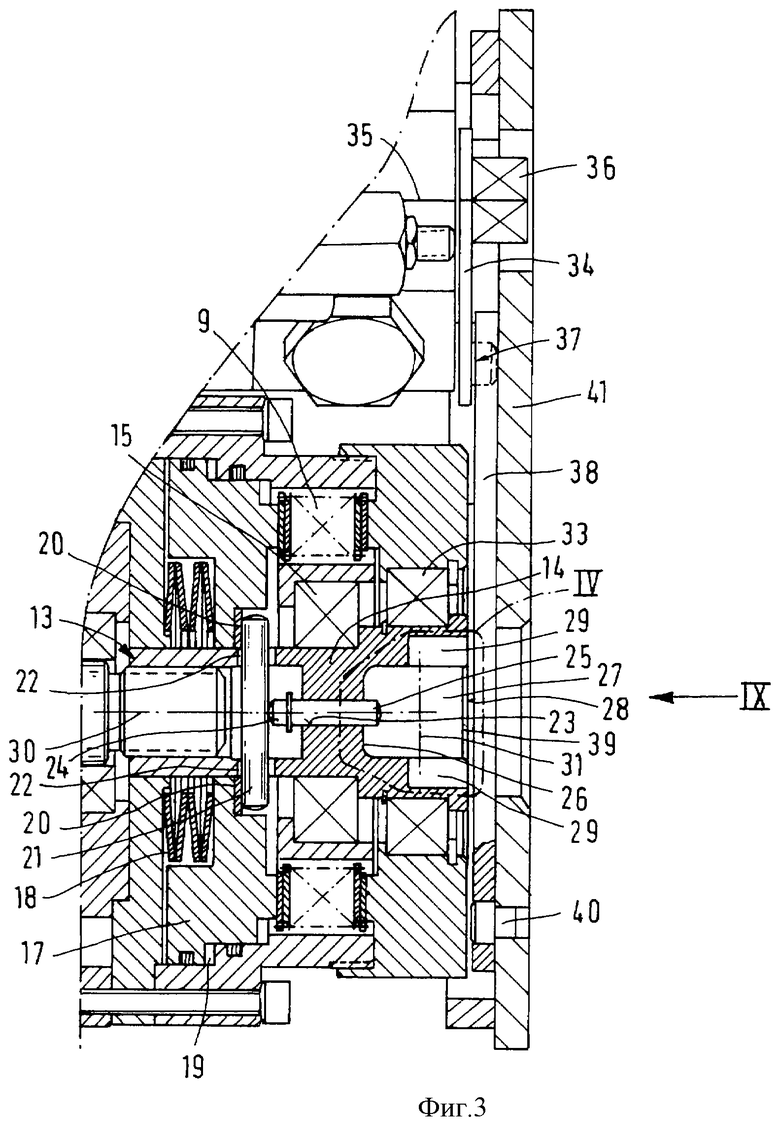
фиг. 3 - вертикальный частичный разрез подъемного привода в соответствии с вырезом III по фиг.2 в увеличенном масштабе;
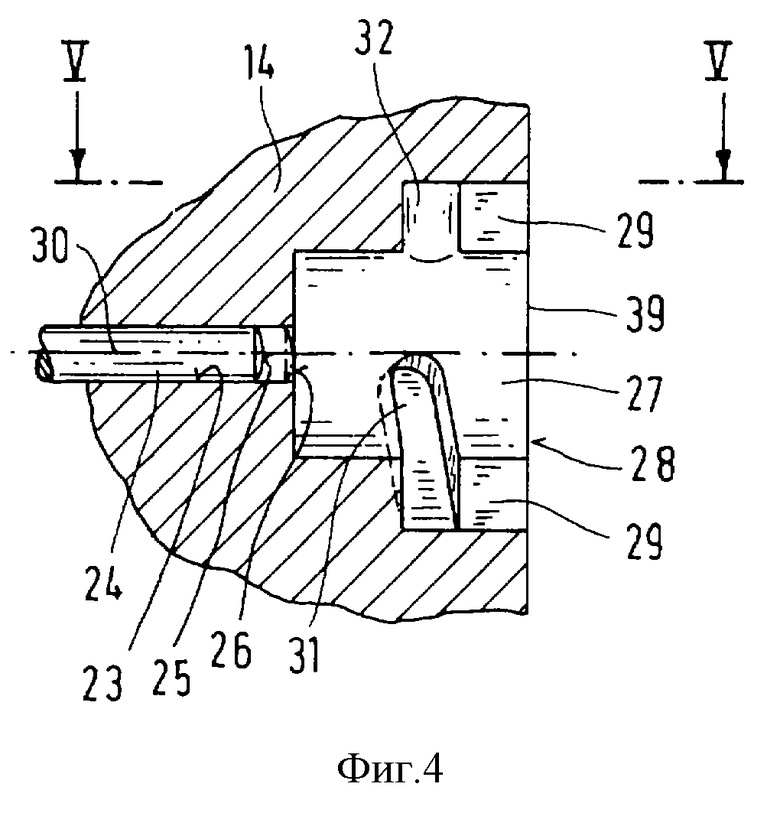
фиг.4 - деталь IV по фиг.3;
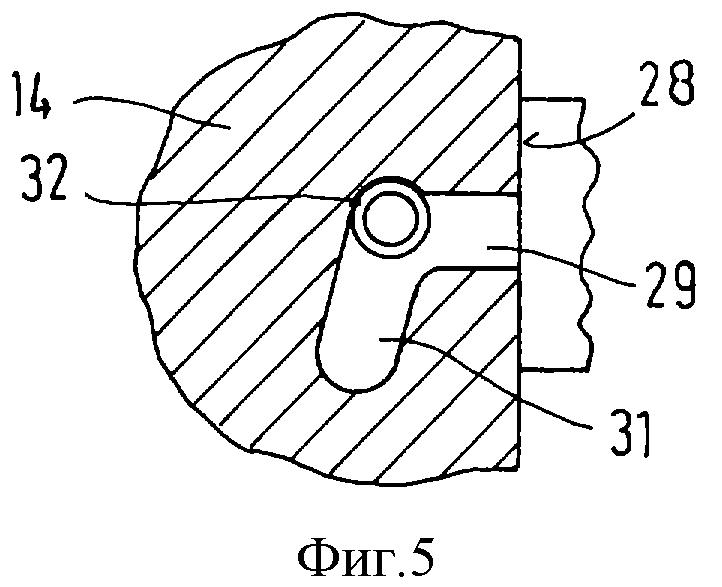
фиг.5 - горизонтальный разрез изображения по фиг.4 вдоль линии V-V;
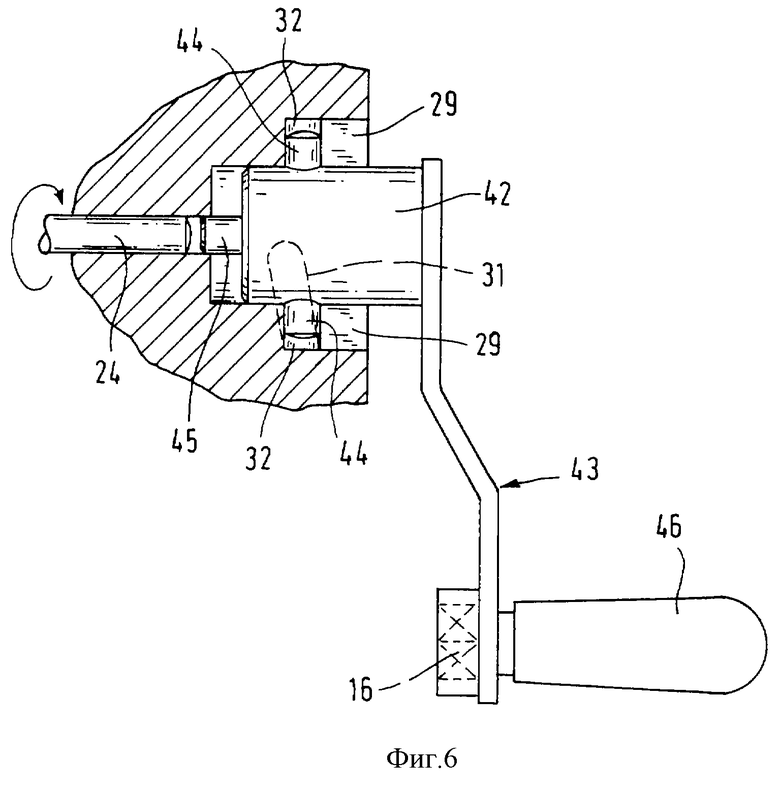
фиг. 6 - изображение по фиг.4 с введенной кривошипной рукояткой во время поднятия груза;
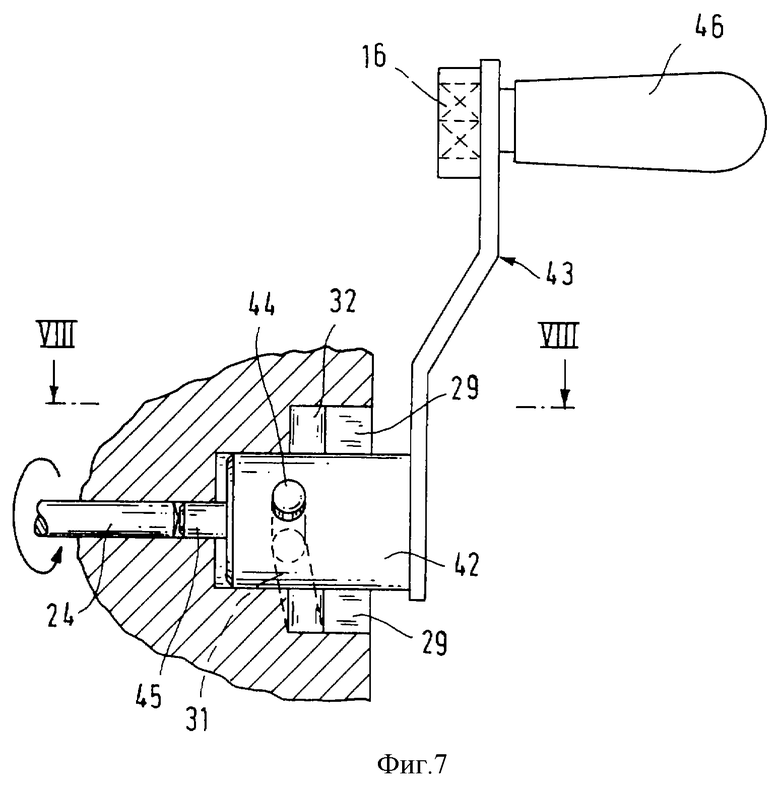
фиг. 7 - изображение по фиг.4 с введенной кривошипной рукояткой во время опускания груза;
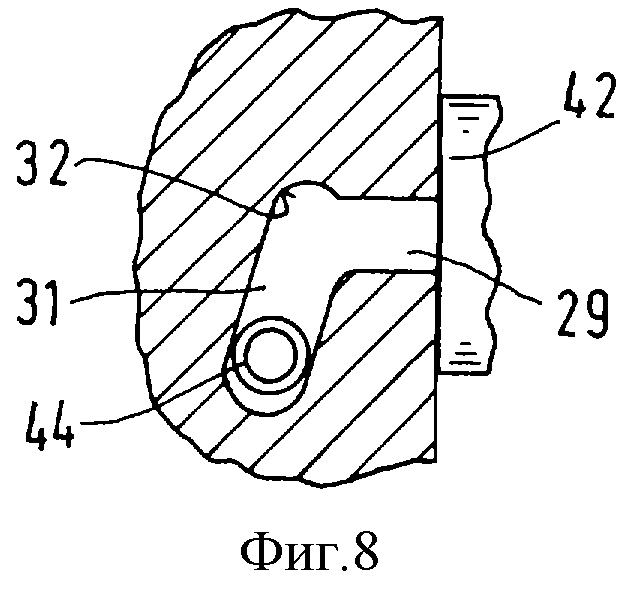
фиг. 8 - горизонтальный разрез изображения по фиг.7 вдоль линии VIII-VIII;
фиг. 9 - вид торца на изображение по фиг.3 вдоль стрелки IX в первом рабочем положении;
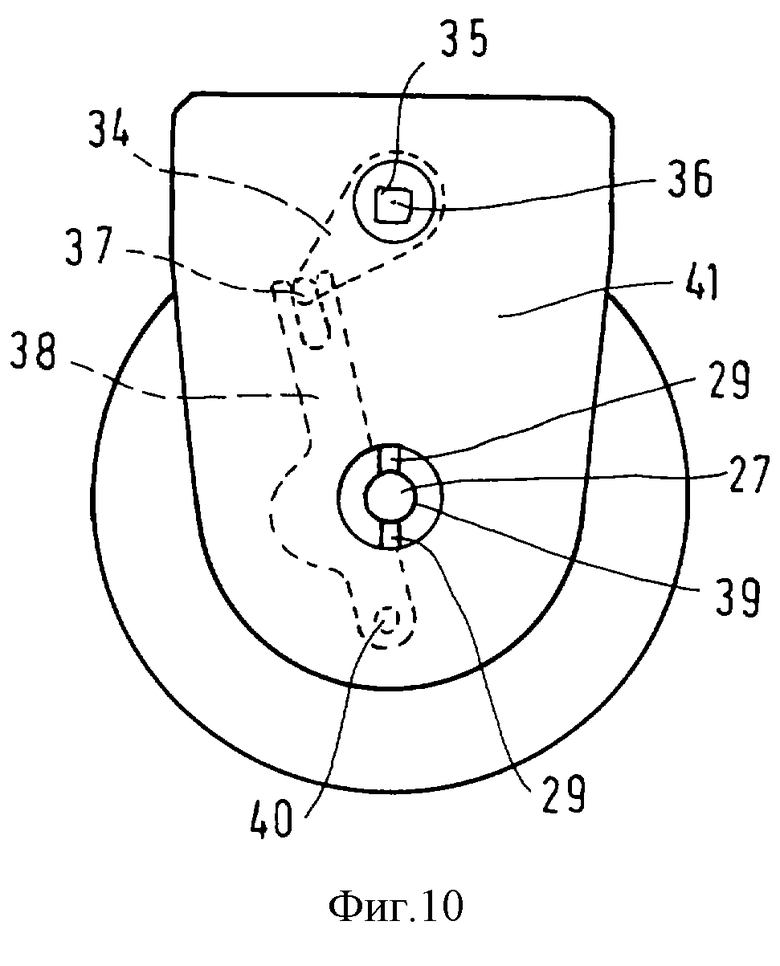
фиг. 10 - вид с торца на изображение по фиг.3 вдоль стрелки IX во втором рабочем положении.
На фиг. 1 позицией 1 обозначен двутавровый в поперечном сечении ходовой рельс, который не изображенным образом составлен из рельсовых отрезков и также не изображенным образом подвешен к крепи штрека подземной горной разработки.
На ходовом рельсе 1 установлена с возможностью перемещения подъемная балка 2 в качестве составляющей части в остальном не изображенного тягового устройства. Для этой цели по концам подъемной балки 2 предусмотрены опорные тележки 3. Подъемная балка 2 имеет на одном конце подъемный привод 4 с цепью 5 и грузовым крюком 6. Такая подъемная балка 2 может быть, например, выполнена с возможностью соединения с другой идентичной подъемной балкой 2 в параллельно-встречное устройство. В этом случае грузовые крюки 6 служат для приема образованного, например, контейнером груза L.
Подъемный привод 4 состоит, как показано на фиг.1 и 2, в принципе из приводимого в действие гидравлически двигателя 7 с управляющим устройством 8 и многодисковым тормозом 9, передачи 10, а также корпуса 11 для установки цепного колеса 12. Тяговое усилие передается от двигателя 7 через корпус 11 к передаче 10 и обратно от передачи 10 к цепному колесу 12.
Как показано более подробно на фиг.3, вал 13 подъемного привода с концевым отрезком 14 проходит через муфту свободного хода 15 как составляющую часть многодискового тормоза 9. На многодисковый тормоз 9 опирается поршень 17, который с одной стороны может быть нагружен натяжной пружиной 18 в виде пакета тарельчатых пружин и с другой стороны гидравлической жидкостью в пространстве 19. Если в пространстве 19 нет рабочей жидкости, то натяжная пружина 18 сжимает диски многодискового тормоза 9 вместе, так что они выполняют свою функцию торможения. При подаче рабочей жидкости в пространство 19, наоборот, сжимается натяжная пружина 18, так что диски многодискового тормоза 9 разгружаются, и функция торможения устраняется.
Поршень 17 имеет на торцевой поверхности по внутренней окружности радиальные выемки 20, в которые входит поперечный штифт 21, который установлен в пазах 22 вала 13 подъемного привода.
С поперечным штифтом 21 находится в контакте установленный в отверстии 23 вала 13 подъемного привода с возможностью аксиального перемещения чувствительный штифт 24 (смотри также фиг.4 и 5). Противоположная поперечному штифту 21 торцевая сторона 25 чувствительного штифта 24 расположена на расстоянии от входа 26 отверстия 23 в торцевом поводковом углублении 27 концевого участка 14 вала 13 подъемного привода. Поводковое углубление 27 имеет цилиндрическую конфигурацию. По периферии поводкового углубления 27 предусмотрены два исходящих от торцевой поверхности 28 вала 13 подъемного привода, расположенных диаметрально противоположно аксиальных паза 29. На внутреннем конце аксиальные пазы 29 переходят в наклонные пазы 31, которые проходят наклонно к средней оси 30 вала 13 подъемного привода. Кроме того, на фиг. 4 и 5 показано, что на внутреннем конце аксиальных пазов 29 предусмотрены фиксирующие канавки 32.
На фиг.3 позицией 33 обозначен подшипник качения для опоры вала 13 подъемного привода.
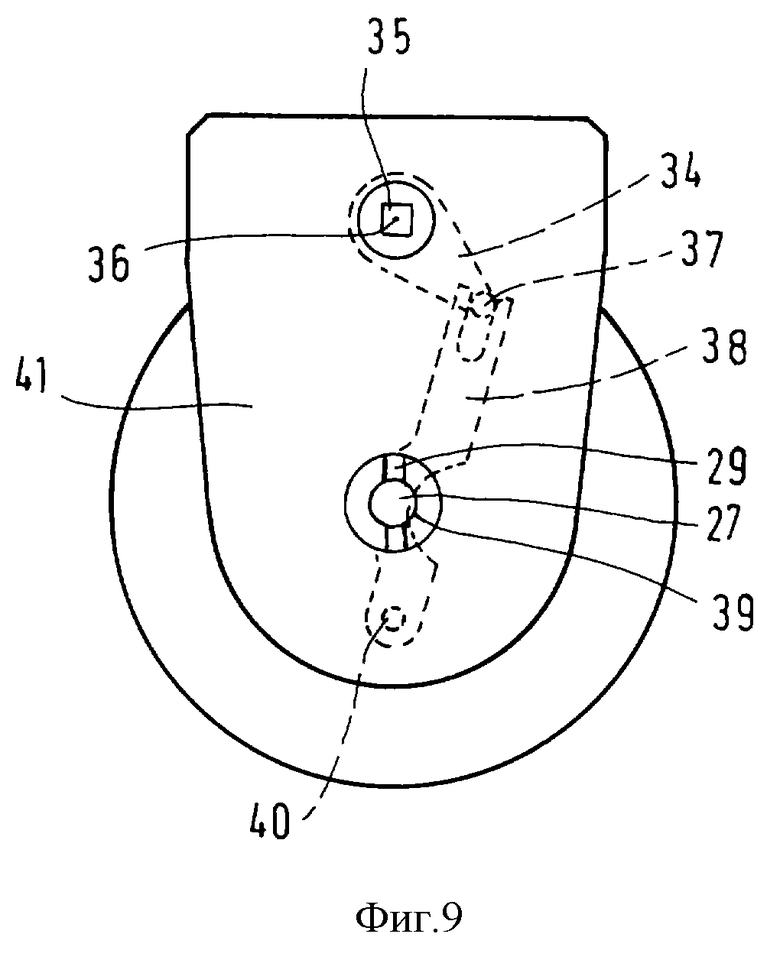
Как показано на фиг.3, 9 и 10, на торцевой стороне вала 13 подъемного привода установлен рычаг 34 переключения, вал 35 которого с торцевой стороны снабжен многогранным выступом 36 (смотри также фиг.2). Вал 35 соединен с не изображенным клапаном, через который можно прерывать и возобновлять подвод энергии к двигателю 7 подъемного привода 4.
Рычаг переключения 34 через направляющую 37 с кулисным камнем связан с запирающим рычагом 38, который служит для закрывания или открывания входа 39 поводкового углубления 27 (фиг.3, 4, 9 и 10). Запирающий рычаг 38 установлен с возможностью поворота на противоположной от вала 35 рычага 34 переключения стороне входа 39 поводкового углубления 27 вокруг оси 40.
Для защиты рычага 34 переключения и запирающего рычага 38 торцевая сторона подъемного привода 4 закрыта торцевой пластиной 41 (фиг.2, 3, 9 и 10).
В поводковое углубление 27 может вводиться вставная цапфа 42 показанной на фиг. 2, 6, 7 и 8 кривошипной рукоятки 43. Вставная цапфа 42 имеет установленные в радиальном направлении поводковые пальцы 44 для зацепления с аксиальными и наклонными пазами 29, 31 поводкового углубления 27 (фиг.6-8).
Кроме того, вставная цапфа 42 имеет со стороны торца нажимной штифт 45, который может описываемым подробно ниже способом входить в контакт с чувствительным штифтом 24.
Кроме того, кривошипная рукоятка 43 на продолжении ручки 46 имеет многогранную гильзу 16, которую можно с геометрическим замыканием состыковать с многогранным выступом 36 на валу 35 рычага 34 переключения.
В нормальном положении ручного привода рычаг 34 переключения повернут, как показано на фиг.9, направо. За счет этого в значительной степени закрывается вход 39 поводкового углубления 27. Во всяком случае, невозможно ввести в него вставную цапфу 42.
При отключении энергии привода и, если необходимо при таком отключении энергии поднять груз L вручную, то сперва с помощью кривошипной рукоятки 43 (а точнее, гильзы 16) необходимо повернуть рычаг 34 переключения в изображенное на фиг.10 положение переключения, так что поворачивается также запирающий рычаг 38 и освобождает вход 39 поводкового углубления 27. Одновременно через вал 35 рычага 34 переключения перекрывается любая дальнейшая подача энергии к двигателю 7 подъемного привода 4. Двигатель 7 может вращаться свободно. Затем вставную цапфу 42 вводят в поводковое углубление настолько, что поводковые пальцы 44 входят в показанные на фиг.4-6 фиксирующие канавки 32. При этом нажимной штифт 45 находится еще на расстоянии от чувствительного штифта 24. Теперь можно вращать кривошипную рукоятку 43, например, в направлении по часовой стрелке, так что вращается также вал 13 подъемного привода при использовании муфты 15 свободного хода, и оператор подъемного привода 4 может поднимать груз L. При этом многодисковый тормоз 9 находится под воздействием натяжной пружины 18 в положении торможения. Если оператор снова отпустит кривошипную рукоятку 43, то многодисковый тормоз 9 зафиксирует груз L в поднятом положении.
Для того чтобы опустить груз L, оператор вращает кривошипную рукоятку 43 в направлении против часовой стрелки. За счет этого вставная цапфа, согласно фиг. 7 и 8, скользит из фиксирующих канавок 32 в наклонные пазы 31. При этом аксиальном перемещении нажимной штифт 45 на торцевой стороне вставной цапфы 42 приходит в контакт с чувствительным штифтом 24. За счет этого чувствительный штифт 24 толкает поперечный штифт 21 и через поперечный штифт 21 также поршень 17 против возвратного усилия натяжной пружины 18 влево (фиг. 3), так что многодисковый тормоз разгружается. В зависимости от веса груза L оператор может, следовательно, осторожно опускать груз. Если при этом груз L превышает скорость вращения кривошипной рукоятки 43, то автоматически вступает в действие натяжная пружина 18 и воздействует на многодисковый тормоз 9 так, что дальнейшее движение вниз останавливается. Затем оператор должен снова начать процесс опускания.
Изобретение относится к оборудованию для подъема грузов. Приводимый в действие пневматически, гидравлически или электрически подъемный привод для установленной с возможностью перемещения по подвешенному ходовому рельсу балки имеет многодисковый тормоз с муфтой свободного хода, который с помощью механической натяжной пружины удерживается в положении торможения и может отпускаться с помощью растормаживающей силы и через который проходит вал подъемного привода. В выступающем из муфты свободного хода концевом участке вала подъемного привода с торцевой стороны предусмотрено поводковое углубление для вставной цапфы кривошипной рукоятки. С помощью кривошипной рукоятки при отключении энергии привода можно поднимать подвешенный на балку груз с использованием муфты свободного хода и опускать с преодолением возвратного усилия натяжной пружины при разгрузке многодискового тормоза. Изобретение обеспечивает контролируемые подъем и опускание груза при отключении энергии привода. 4 з.п. ф-лы, 10 ил.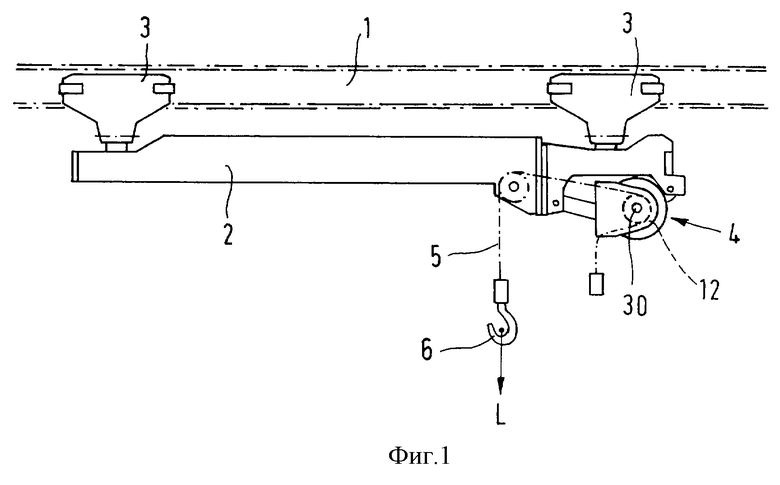
| DE 4401423 A1, 22.06.1995 | |||
| GB 1365655 A, 04.09.1974 | |||
| US 3682442 A, 08.08.1972 | |||
| СПУСКНОЙ КЛАПАН | 1998 |
|
RU2155904C2 |
| ЭЛЕКТРИЧЕСКАЯ ФРИКЦИОННО-БАРАБАННАЯ .ПЕБЕДКА | 0 |
|
SU310863A1 |
| РУЧНАЯ ЛЕБЕДКА | 0 |
|
SU205250A1 |

