Изобретение относится к области машиностроения, и может быть использовано в прецизионном позиционировании.
Известно устройство манипулирования, состоящее из механизма захвата и пьезоэлектрического привода. [S. Fatikov, К. Santa, J. Zoelner, R. Zoelner, A. Haag "Flexible piezoelectric micromanipulation robots for a microassembly desktop station" ICAR/97, Monterey, CA, July 7-9, 1997, p. 241-246]. Манипулятор управляется тремя биморфными пьезоприводами. Первый привод одним концом закреплен непосредственно к платформе и используется для перемещения манипулятора по оси Z, к свободному концу привода крепятся два других, которые образуют механизм захвата. Максимальный размер объектов манипулирования составляет 3 мм. Максимальное усилие, развиваемое манипулятором робота, составляет 0,23Н.
Недостатками данной конструкции являются небольшой диапазон движения манипулятора вдоль оси Z, невозможность осуществить вращение манипулятора вокруг собственной оси и наличие высокого механического напряжения в биморфных пьезоприводах механизма захвата, что ведет к их разрушению.
Наиболее близким по технической сущности и достигаемому результату к заявляемому изобретению является устройство, которое используется для выполнения манипуляций под микроскопом [О.В. Даринцев и др. Пьезоэлектрический мобильный микроробот. Интеллектуальные автономные системы, межд. научное издание, УГАТУ, Уфа, 1996, с. 63-68]. Система содержит две идентичные подсистемы, каждая из подсистем представляет собой магнитомягкую шаровую основу с приспособлением для крепления микроинструмента. На подвижной платформе микроробота установлены два магнита, компенсирующие силу тяжести и обеспечивающие постоянную силу прижатия шаровой основы к приводам. Движение манипуляторов генерируется с помощью трех приводов, представляющих собой трубчатые пьезокерамические элементы, оси которых пересекаются в центре шаровой основы под углом 90o друг к другу. В результате согласованного движения двух подсистем манипулирования осуществляется захват объектов.
Недостатками данной конструкции являются большие габариты, сложность удержания микрообъектов.
Задача, на решение которой направлено заявляемое изобретение является повышение производительности, связанное с повышением надежности захвата микрообъектов, увеличением степеней свободы манипулятора, уменьшением габаритов конструкции, освобождением пьезоприводов от поперечного механического напряжения.
Для этого в пьезоэлектрическом манипуляторе, содержащем магнитопроводящую шаровую основу, узел генерации движений и пьезоэлектрический схват с пьезоэлектрическим приводом, пьезоэлектрический схват выполнен в виде основы схвата, тяг, скоб и винта, а пьезоэлектрический привод выполнен в виде плоских пьезоэлектрических элементов, при этом магнитопроводящая шаровая основа соединена с основой схвата, к которой одними концами жестко прикреплены плоские пьезоэлектрические элементы, с вторыми концами которых соединены посредством скоб с возможностью скольжения вдоль пьезопривода тяги, которые прикреплены к основе схвата при помощи винта.
На чертеже показан пьезоэлектрический манипулятор.
Пьезоэлектрический манипулятор содержит магнитопроводящую шаровую основу 1 и пьезоэлектрический схват 2. Пьезоэлектрический схват содержит соединенную с магнитопроводящей шаровой основой манипулятора 1 основу cхвата 3, к которой одним концом жестко прикреплен пьезопривод 4. Второй конец пьезопривода 4 соединен с тягой 5 при помощи скобы 6. Соединение выполнено с возможностью скольжения тяги 5 вдоль пьезопривода 4. Аналогичным образом осуществлено соединение пьезопривода 7 с тягой 8 при помощи скобы 9. Тяги 5 и 8 прикреплены к основе схвата 3 при помощи винта 10. Пьезопривод выполнен в виде плоских пьезоэлектрических элементов.
Принцип работы данного устройства основан на обратном пьзоэлектрическом эффекте. Под действием электрического напряжения, поступающего с узла генерации, пьезоприводы 4 и 7 отклоняются в одном из направлений. Отклоняясь, пьезоприводы приводят в движение тяги 5 и 8, в результате чего происходит раскрытие или закрытие схвата. За счет изменения соотношения плеч тяг 4 и 7 достигается требуемый диапазон раскрытия схвата.
Узел генерации движения состоит из цифроаналогового преобразователя (ЦАП) и операционного усилителя (ОУ). Поступающий с компьютера цифровой код преобразуется в ЦАП в аналоговый сигнал, который усиливается ОУ и прикладывается к пьезоприводам. Точность выполнения движений зависит от разрядности ЦАП, величина отклонений - от типа пьезокерамики и величины прикладываемого напряжения.
Вращательное движение шаровой основы осуществляется, аналогично прототипу, путем прикладывания соответствующих напряжений к трем трубчатым пьезоэлектрическим элементам, оси которых пересекаются в центре шаровой основы под углом 90o друг к другу.
Итак, заявляемое изобретение позволяет повысить производительность и надежность захвата микрообъектов, увеличить число степеней свободы манипулятора, уменьшить габариты конструкции, освободить пьезоприводы от поперечного механического напряжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МИКРОРОБОТ | 1999 |
|
RU2164362C2 |
| КАПИЛЛЯРНЫЙ МИКРОЗАХВАТ С ОБРАТНОЙ СВЯЗЬЮ | 2004 |
|
RU2261795C1 |
| ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 2002 |
|
RU2210493C1 |
| МИКРОСХВАТ С СИЛОВЫМ ОЧУВСТВЛЕНИЕМ | 2004 |
|
RU2261170C1 |
| МОБИЛЬНЫЙ ВАКУУМНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МИКРОРОБОТ | 2002 |
|
RU2205475C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ МИКРОСХВАТ | 2004 |
|
RU2266190C1 |
| СХВАТ МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2259915C1 |
| ПРИВОД МИКРОМАНИПУЛЯТОРА | 2000 |
|
RU2175601C2 |
| МАГНИТОСТРИКЦИОННЫЙ МИКРОСХВАТ | 2009 |
|
RU2417877C1 |
| НАНОСТРУКТУРНОЕ ЗАХВАТНОЕ УСТРОЙСТВО МИКРОМАНИПУЛЯТОРА | 2006 |
|
RU2331505C1 |
Изобретение относится к области машиностроения и может найти применение в прецизионном позиционировании. Пьезоэлектрический схват выполнен в виде основы схвата, тяг, скоб и винта. Пьезоэлектрический привод выполнен в виде плоских пьезоэлектрических элементов. Магнитопроводящая шаровая основа соединена с основой схвата. К основе одними концами жестко прикреплены плоские пьезоэлектрические элементы. С вторыми концами этих элементов соединены посредством скоб с возможностью скольжения вдоль пьезопривода тяги. Тяги прикреплены к основе схвата при помощи винта. Такое выполнение пьезоэлектрического манипулятора позволяет повысить производительность и надежность захвата микрообъектов, увеличить число степеней свободы манипулятора, уменьшить габариты конструкции, освободить пьезоприводы от поперечного механического напряжения. 1 ил.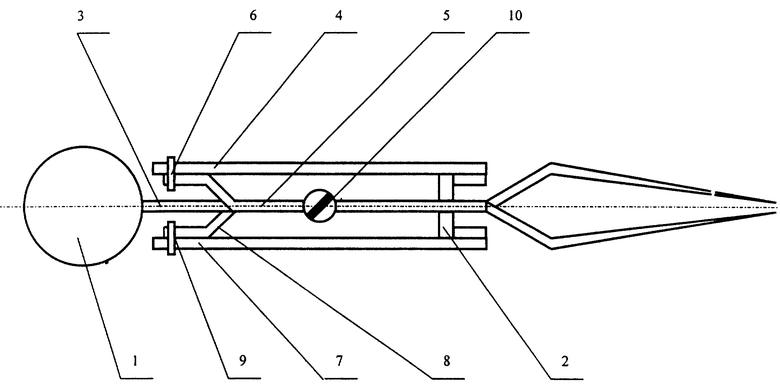
Пьезоэлектрический манипулятор, содержащий магнитопроводящую шаровую основу, узел генерации движений и пьезоэлектрический схват с пьезоэлектрическим приводом, отличающийся тем, что пьезоэлектрический схват выполнен в виде основы схвата, тяг, скоб и винта, а пьезоэлектрический привод выполнен в виде плоских пьезоэлектрических элементов, при этом магнитопроводящая шаровая основа соединена с основой схвата, к которой одними концами жестко прикреплены плоские пьезоэлектрические элементы, с вторыми концами которых соединены посредством скоб с возможностью скольжения вдоль пьезопривода тяги, прикрепленные к основе схвата при помощи винта.
| О.В.ДАРИНЦЕВ И ДР | |||
| Пьезоэлектрический мобильный микроробот | |||
| Интеллектуальные автономные системы | |||
| - Уфа, 1996, УГАТУ, с.63 - 68 | |||
| Манипулятор | 1982 |
|
SU1060461A1 |
| Микроманипулятор | 1983 |
|
SU1261789A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МАНИПУЛЯТОР ДЛЯ ТУННЕЛЬНОГО МИКРОСКОПА | 1993 |
|
RU2061295C1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| DE 4031138 A1, 11.04.1991. | |||

