Изобретение относится к области радиолокации и предназначено для использования в импульсно-доплеровских РЛС с малой скважностью и высокой частотой повторения импульсов.
Известен способ повышения вероятности обнаружения целей импульсно-доплеровскими РЛС с высокой частотой повторения импульсов, основанный на уменьшении длительности зондирующих импульсов [Л-1] . При фиксированной частоте повторения импульсов это позволяет уменьшить вероятность попадания отраженных oт цели сигналов в "слепые" зоны по дальности, возникающие во время излучения передатчиком мощных зондирующих сигналов.
Уменьшение длительности зондирующих импульсов приводит к необходимости для сохранения потенциальных характеристик РЛС повышать пиковую мощность передатчика и увеличивать количество каналов обработки сигнала, то есть усложнять аппаратуру PЛC.
Наиболее близким по технической сущности является способ, основанный на облучении цели, находящейся на определенной угловой позиции, несколькими сигналами с различными значениями частоты повторения [Л-2] , что также уменьшает вероятность попадания отраженных сигналов в "слепую" зону по дальности, но без усложнения аппаратуры РЛС.
Недостатком этого способа является увеличение времени наблюдения и соответственно увеличение периода обзора.
Целью предлагаемого способа является повышение вероятности обнаружения удаленных целей в импульсно-доплеровском радиолокаторе с высокой частотой повторения и малой скважностью импульсов путем улучшения потенциальных характеристик РЛС, увеличения максимальной дальности действия, сокращения времени обзора пространства и времени измерения координат цели.
Поставленная цель - повышение вероятности обнаружения цели или, что то же самое, увеличение предельной дальности действия РЛС - достигается при предлагаемом способе, благодаря следующим факторам.
1. Отсутствие "слепых" зон, распределенных по дальности с периодом следования импульсов, и энергетических потерь, связанных с попаданием отраженных импульсов в "слепые" зоны.
2. Сохранение средней мощности и передатчика путем уменьшения скважности и импульсов без потерь на "слепые" зоны.
3. Уменьшение потерь на дробление энергии сигнала по смежным каналам дальности путем увеличения степени перекрытия каналов дальности при уменьшении скважности при том же числе каналов.
4. Уменьшение уровня мешающих сигналов от ближайших местных предметов, земной поверхности и метеообразований из-за уменьшения количества отраженных от них импульсов, обрабатываемых в приемнике.
Сущность предлагаемого изобретения заключается в том, что излучают зондирующие импульсы с высокой частотой повторения, принимают отраженные от целей сигналы, причем зондирующие сигналы излучают сериями длительностью, равной времени задержки сигнала от наиболее удаленной цели при отключенном приемнике, а затем принимают их в течение такого же времени.
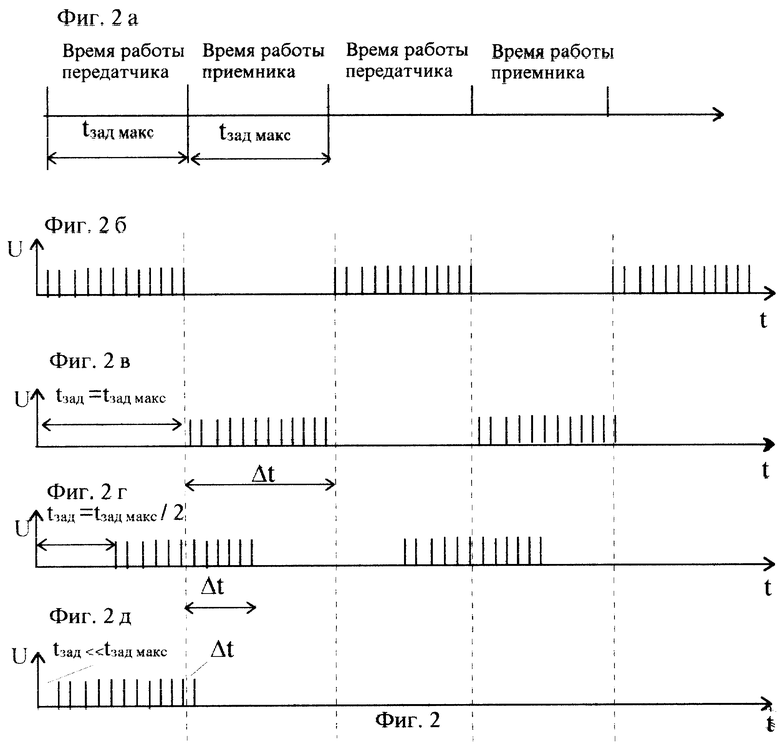
На фиг. 1 изображена блок-схема устройства, реализующего заявленный способ; на фиг.2а - временные диаграммы; на фиг.2б приведены эпюры сигналов на выходе передающего устройства; на фиг.2в - эпюры сигналов на входе антенны, отраженных от целей, находящейся на максимальной дальности Dмакс; на фиг.2г - от целей, находящихся на середине дистанции Dмакс/2; на фиг.2д - от целей, находящихся в начале дистанции.
Устройство, реализующее способ повышения вероятности обнаружения целей импульсно-доплеровской РЛС с высокой частотой повторения, состоит из передатчика 1, антенны 2, переключателя прием-передача 3 и приемника 4.
Устройство работает следующим образом. Генерируемые передатчиком 1 зондирующие сигналы с высокой частотой повторения и малой скважностью через антенну 2 излучаются в пространство. Переключатель прием-передача 3 через интервалы tзадмакс=2Dмакс/с, равные времени задержки сигнала от цели, находящейся на максимальной для данной РЛС дальности Dмакс, прерывает работу передатчика и открывает приемник 4 на такой же интервал времени. Периоды работы передатчика и приемника чередуются в течение времени, необходимого для когерентного накопления сигнала, фиг.2а.
На вход приемного устройства в период его работы поступает серия импульсов, длительностью t, равной полной длительности серии отраженных от цели импульсов при нахождении цели на максимальной дальности Dмакс, фиг.2в. От цели на середине дистанции Dмакс/2 поступает половина полной серии Δt = tзадмакс/2, фиг. 2г, а в начале дистанции Δt≪tзадмакс, пропорциональная дальности малая часть полной серии импульсов.
При предлагаемом способе работы РЛС прием отраженных от цели сигналов производится в периоды, когда передатчик не работает. Поэтому при предлагаемом способе отсутствуют слепые зоны, возникающие при поступлении отраженных импульсов в моменты генерации мощных зондирующих импульсов.
При наблюдении удаленных целей уменьшение длительности серии импульсов на входе приемника во время его работы при отражении от ближайших мешающих объектов создается положительный эффект временной селекции обрабатываемых сигналов.
Предлагаемый способ промышленно применим и может быть реализован при обнаружении целей импульсно-доплеровской РЛС, типа Ш-101 ГС1-642.003-25.
ЛИТЕРАТУРА:
1. Поттер Н.С. Устранение неоднозначности по дальности в РЛС с высокой частотой повторения, ВРЭ, сер. ОТ, вып. 11, 1977.
2. Справочник по радиолокации. Под ред. М. Сколника, т.3, М., Радио, 1977.
Изобретение относится к области радиолокации и может быть использовано в импульсно-доплеровских РЛС. Способ повышения вероятности обнаружения удаленных целей импульсно-доплеровской РЛС основан на излучении зондирующих импульсов сериями длительностью, равной задержке сигнала от наиболее удаленной цели, при отключенном приемнике, а затем принимают их в течение такого же времени при отключенном передатчике. Достигаемый технический результат - увеличение предельной дальности действия РЛС. 2 ил.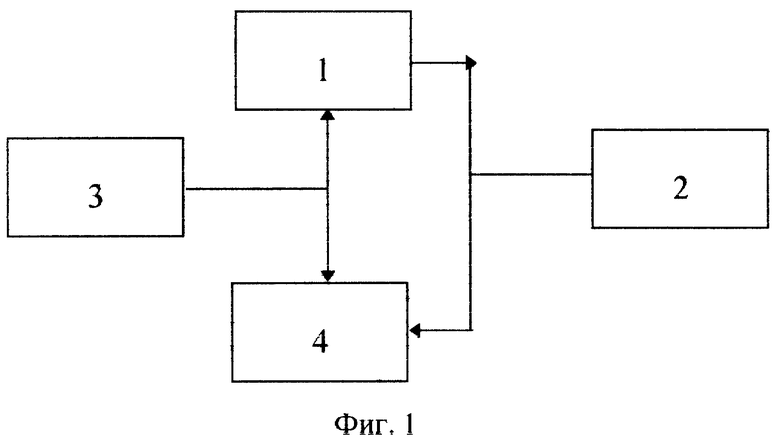
Способ повышения вероятности обнаружения удаленных целей импульсно-доплеровскими РЛС, основанный на излучении зондирующих импульсов и приеме отраженных от цели сигналов, отличающийся тем, что зондирующие импульсы излучают сериями длительностью, равной задержке сигнала tзадмакс= 2 Dмакс/с от наиболее удаленной для данной РЛС цели, при отключенном на время tзадмакс= 2 Dмакс/с приемнике, а затем принимают их в течение такого же времени при отключенном передатчике, где tзадмакс - время задержки сигнала от цели, Dмакс - максимальная дальность для данной РЛС, с - скорость света.
| RU 2053522 C1, 27.01.1996 | |||
| DE 3414156 A1, 24.10.1985 | |||
| US 4310842, 12.01.1982 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ ОТЛИВОК | 2002 |
|
RU2240894C2 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОГО ПОЛЯ ПОДВОДНОГО ТРАНСПОРТНОГО ПЛАВСРЕДСТВА | 1995 |
|
RU2080654C1 |

