Изобретение относится к радиолокационной технике, в частности к радилокационным станциям для определения координат целей.
Известен способ измерения скорости целей [Бакулев П.А.. Степин В.М. Методы и устройства селекции движущихся целей. - М.: Радио и связь, 1986, - 34 с], основанный на когерентном методе непрерывного излучения, в котором производится сравнение по фазе отраженного сигнала с опорным когерентным сигналом и выделяется огибающая, зависящая от радиальной скорости цели.
Наиболее близким по технической сущности, выбранным в качестве прототипа, является способ измерения радиальной скорости цели двухчастотной радиолокационной станцией [Бакулев П.А., Степин В.М. Методы и устройства селекции движущихся целей. - М.: Радио и связь, 1986, - 63 с], основанный на генерации, модуляции и излучении совмещенных во времени радиоимпульсов с одинаковым периодом повторения на несущих частотах f1 и f2, одновременном преобразовании указанных радиоимпульсов в опорный когерентный сигнал разностной частоты Δfоп=f2-f1, приеме отраженных от цели сигналов частотой f1+Fд1 и f2+Fд2, где Fд1 - доплеровский сдвиг на частоте f1, Fд2 - доплеровский сдвиг на частоте f2, преобразовании сигналов от цели в сигналы частотой Δf+ΔFд и сравнении фаз преобразованного сигнала цели и опорного сигнала.
Однако известный способ измерения скорости цели имеет ограниченное быстродействие.
Техническим результатом предлагаемого изобретения является повышение быстродействия радиолокационной станции для определения радиальной скорости цели.
Поставленная цель достигается тем, что предлагаемый способ измерения радиальной скорости цели радиолокационной станцией, основанный на генерации, модуляции и излучении совмещенных во времени радиоимпульсов с одинаковым периодом повторения на несущих частотах f1 и f2, одновременном преобразовании частоты указанных радиоимпульсов в опорный когерентный сигнал разностной частоты Δfоп=f2-f1, приеме отраженных от цели сигналов частотой f1+Fд1 и f2+Fд2, преобразовании сигналов от цели в сигналы частотой Δf+ΔFд и сравнении фаз преобразованного сигнала цели и опорного сигнала.
Новыми признаками заявляемого способа являются формирование последовательности из N-1, где N≥2, опорных сигналов, сдвинутых по фазе относительно сигнала опоры, каждый из которых имеет фазовый сдвиг в интервале 0-2π, с дискретом фазы ΔΨn, сравнении фазы преобразованного сигнала цели и сформированных опорных когерентных сигналов, получении результирующих сигналов, пропорциональных Ucos(2πFдt+ΔΨn), где ΔFд - доплеровская поправка на разностной частоте, t - текущее время, U - амплитуда сигнала, сравнении их по амплитуде с заранее заданным порогом и преобразовании полученных сигналов в цифровой код.
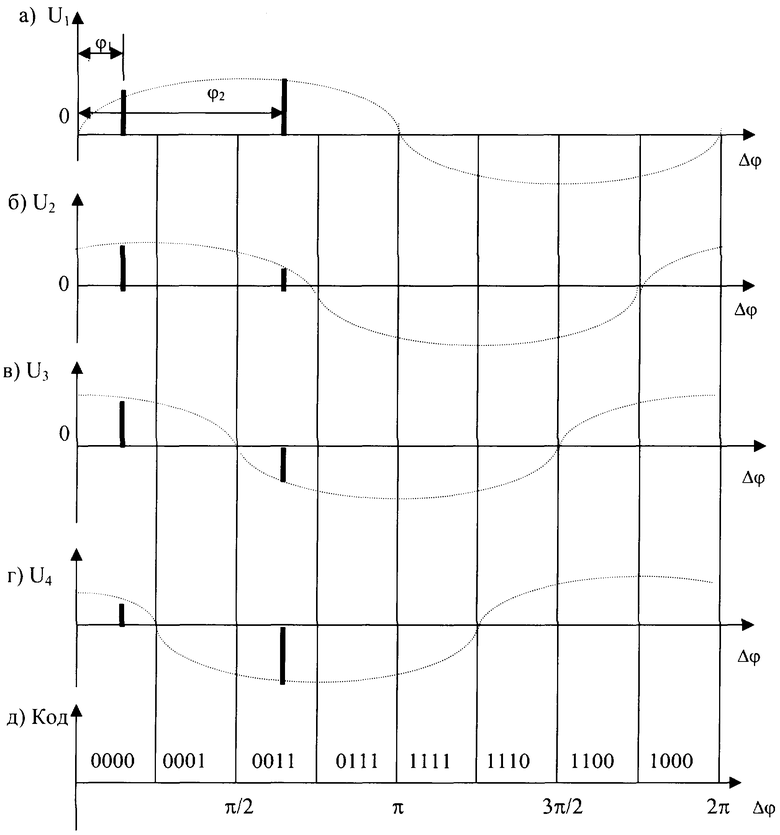
На чертеже представлены эпюры, поясняющие суть предлагаемого способа, где а-г - эпюры результирующих сигналов для двух реализаций принятых импульсов 1 и 2, отраженных от цели, д - цифровой код, соответствующий скорости цели.
В радиолокационной станции для определения радиальной скорости цели генерируются, модулируются, излучаются совмещенные во времени радиоимпульсы с одинаковым периодом повторения на несущих частотах f1 и f2, одновременно с этим формируется опорный когерентный сигнал разностной частоты Δfоп=f2-f1. Отраженные от цели сигналы f1+Fд1 и f2+Fд2 принимаются, преобразуются по частоте в Δf+ΔFд.
Каждый сигнал последовательности (гребенки) из N-1 опорных сигналов, где N≥2, сдвинут по фазе относительно сигнала опоры, имеет различный фазовый сдвиг в интервале 0-2π, с дискретом фазы ΔΨ=2π(1-к), где к - коэффициент пропорциональности, 0≤к≤1.
Далее каждый сигнал полученной последовательности (опорный когерентный сигнал разностной частоты Δfоп, имеющий сдвиг по фазе ΔΨn) сравнивают с отраженным от цели сигналом.
Поскольку частота опорного когерентного сигнала Δfоп равна разностной частоте Δf, на которой происходит сравнение фаз, т.е. Δfоп=Δf, разность фаз сравниваемых сигналов ϕn (t) равна:
и зависит как от доплеровской поправки, так и от начального сдвига фаз ΔΨn.
Полученные результирующие сигналы пропорциональные Ucos(2πΔFдt+ΔΨn), где ΔFд - доплеровская поправка на разностной частоте, t - текущее время, U - амплитуда сигнала, ΔΨn - начальный сдвиг фаз (а-г) сравнивают с заранее заданным порогом и преобразуют в цифровой код, например двоичный, пропорциональный скорости цели (д).
Таким образом, предлагаемый способ измерения радиальной скорости цели радиолокационной станцией позволяет получить значение скорости цели непосредственно в виде параллельного цифрового кода и за счет этого повысить быстродействие радиолокационной станции для определения радиальной скорости цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ОПРЕДЕЛЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ЦЕЛИ | 2003 |
|
RU2236694C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРАДИАЛЬНОЙ ПРОЕКЦИИ СКОРОСТИ ДВИЖУЩЕЙСЯ ЦЕЛИ | 2007 |
|
RU2367974C2 |
| Способ и система определения скорости локомотива и направления движения | 2023 |
|
RU2808863C1 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
| Способ обнаружения и высокоточного определения параметров морских ледовых полей и радиолокационная система для его реализации | 2019 |
|
RU2723437C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 2012 |
|
RU2510663C2 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ МАЛОЗАМЕТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2534217C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| СПОСОБ РАДИОПРИЕМА ВЫСОКОСКОРОСТНОЙ ИНФОРМАЦИИ КОСМИЧЕСКОЙ РАДИОЛИНИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2530322C1 |
Изобретение относятся к радиолокационной технике, в частности к радилокационным станциям для определения координат целей. Достигаемый технический результат - повышение быстродействия радиолокационной станции при определении радиальной скорости цели. Способ основан на генерации, модуляции и излучении совмещенных во времени радиоимпульсов с одинаковым периодом повторения на несущих частотах f1 и f2, одновременном преобразовании частоты указанных радиоимпульсов в опорный когерентный сигнал разностной частоты Δ fоп = f2 – f1, приеме отраженных от цели сигналов частотой f1 + Fд1 и f2 + Fд2, преобразовании сигналов от цели в сигналы Δf + ΔFд, где Δf – сигнал разностной частоты, ΔFд – доплеровская поправка на разностной частоте, при этом формируют последовательность из N опорных когерентных сигналов, каждый из которых имеет фазовый сдвиг в интервале 0-2π на дискрет ΔΨn относительно опорного когерентного сигнала разностной частоты, сравнивают фазы преобразованного сигнала цели и сформированных опорных когерентных сигналов, N результатов сравнивают по амплитуде с заранее заданным порогом и преобразуют их в параллельный цифровой код, соответствующий скорости цели. 1 ил.
Способ измерения радиальной скорости цели радиолокационной станцией, основанный на генерации, модуляции и излучении совмещенных во времени радиоимпульсов с одинаковым периодом повторения на несущих частотах f1 и f2, одновременном преобразовании частоты указанных радиоимпульсов в опорный когерентный сигнал разностной частоты Δ fоп = f2 – f1, приеме отраженных от цели сигналов частотой f1 + Fд1 и f2 + Fд2, преобразовании сигналов от цели в сигналы Δf + ΔFд, где Δf – сигнал разностной частоты, ΔFд – доплеровская поправка на разностной частоте, отличающийся тем, что формируют последовательность из N опорных когерентных сигналов, каждый из которых имеет фазовый сдвиг в интервале 0-2π на дискрет ΔΨn относительно опорного когерентного сигнала разностной частоты, сравнивают фазы преобразованного сигнала цели и сформированных опорных когерентных сигналов, затем N результирующих сигналов сравнивают по амплитуде с заранее заданным порогом и преобразуют N полученных сигналов в параллельный цифровой код, соответствующий скорости цели.
| Бакулев П.А | |||
| Степин В.М | |||
| Методы и устройства селекции движущихся целей | |||
| Москва, Радио и связь, 1986, с.34, 63 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ | 1998 |
|
RU2158937C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ | 1998 |
|
RU2127437C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ В ДОПЛЕРОВСКИХ ИЗМЕРИТЕЛЯХ ВЕКТОРА СКОРОСТИ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1992 |
|
RU2018864C1 |
| ЦИФРОВОЙ БЛОК ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 1998 |
|
RU2123709C1 |
| US 3704465, 28.11.1972.US 4439766, 27.03.1984 | |||
| US 4292635, 29.09.1981 | |||
| US 4488154, 11.12.1984 | |||
| US 4806935, 21.02.1989. | |||

