Изобретение относится к области космической техники и может быть использовано для выведения космических аппаратов (КА) с переходных высокоэллиптических орбит на круговую или квазикруговую рабочую орбиту, например геостационарную.
Известен способ выведения КА на квазикруговую конечную орбиту с некоторой исходной квазикруговой орбиты отделения КА от носителя [1]. Данный способ выведения заключается в следующем. После отделения КА от носителя и перехода его в полетную конфигурацию осуществляют единственное включение двигательной установки малой тяги (ДУ МТ) на разгон в непрерывном режиме. При этом траектория КА представляет из себя постепенно раскручивающуюся спираль. В поцессе раскрутки происходит также изменение наклонения плоскости текущей орбиты посредством отклонения вектора тяги по углу рыскания. Причем величину угла отклонения вектора тяги по рысканию изменяют в зависимости от текущей высоты орбиты и ее наклонения к плоскости экватора таким образом, чтобы высота заданной конечной квазикруговой орбиты достигалась одновременно с ее заданным наклонением.
Недостатакми данного способа выведения являются значительная продолжительность выведения КА на рабочую орбиту и необходимость непрерывного расчета угла отклонения вектора тяги по рысканию. Требование непрерывного расчета угла отклонения вектора тяги по рысканию в течение продолжительного времени приводит к необходимости применять сложную систему управления, осуществлять постоянный контроль параметров текущей орбиты с помощью наземных средств, что увеличивает стоимость всего КА и процесса его выведения.
Наиболее близким по технической сути является способ выведения на конечную заданную орбиту космического аппарата с использованием двигателей, обладающих большим удельным импульсом и малой тягой, приведенный в [2], когда круговую или конечную заданную орбиту с меньшим эксцентриситетом формируют путем непрерывной работы ДУ МТ в течение всего этапа выведения. Причем в области апогея вектор тяги ориентируют таким образом, чтобы осуществлять как подъем высоты перигея, так и изменять наклонение орбиты, а в области перигея таким образом, чтобы уменьшать высоту апогея и изменять наклонение орбиты. При этом величину максимального угла отклонения вектора тяги по рысканию для изменения наклонения плоскости орбиты изменяют от витка к витку и выбирают таким образом, чтобы достижение заданного наклонения рабочей орбиты совпало с достижением высот апогея и перигея заданных конечных значений. Благодаря этому осуществляют индивидуальный контроль высоты перигея и апогея в предварительно определенных постоянных направлениях.
Недостатком такого способа выведения является необходимость расчета нового значения угла отклонения вектора тяги по рысканию и, следовательно, сложность и дороговизна системы управления, а также сложность в управлении КА, требующей постоянного контроля баллистических параметров КА на каждом витке и ввод их в бортовую систему управления, что может быть затруднено из-за ограниченного числа наземных измерительных пунктов (НИП).
Задачей изобретения является упрощение и удешевление системы управления и самого процесса управления выведения КА на конечную заданную орбиту.
Задача решается тем, что в способе выведения космического аппарата на конечную заданную орбиту с использованием двигателей малой тяги, состоящем в выведении космического аппарата с помощью средств выведения с двигателем большой тяги на начальную эллиптическую орбиту с высотой перигея ниже высоты перигея конечной заданной орбиты, высотой апогея выше высоты апогея конечной заданной орбиты и величиной наклонения плоскости орбиты, также отличной от величины наклонения конечной заданной орбиты и включающий участки торможения в области перигея и разгона с изменением наклонения орбиты в области апогея, величины угловых секторов работы двигателей малой тяги в области апогея и перигея и максимальную величину угла отклонения вектора тяги по рысканию выбирают постоянными для всего этапа выведения.
На чертеже представлена схема рабочих участков ДУ МТ при выведении КА с эллиптической переходной орбиты на конечную заданную орбиту с меньшим эксцентриситетом.
Позициями 1 и 2 обозначены, соответственно, точки перигея и апогея переходной орбиты, позицией 3 обозначен участок работы ДУ МТ КА в области перигея 1 на понижение высоты апогея, а позицией 4 - участок работы ДУ МТ КА в области апогея 2 на повышение высоты перигея и изменение наклонения орбиты. Позициями 5 обозначены пассивные участки траектории.
Способ выведения осуществляется следующим образом.
После вывода КА с ДУ МТ на высокоэллиптическую переходную орбиту с помощью разгонного блока (РБ) с двигательной установкой большой тяги КА отделяется от разгонного блока и начинает выведение на конечную заданную орбиту путем включения ДУ МТ на торможение в области перигея для понижения высоты апогея на угловом секторе истинной аномалии ν = ±ϕ1, где ϕ1≤90°, и разгон в области апогея для подъема высоты перигея на угловом секторе истинной аномалии ν = 180°±ϕ2, где ϕ2≤90°. Также в области апогея осуществляется изменение наклонения плоскости орбиты путем отклонения вектора тяги F по рысканию на некоторый угол |α|≤90°. При этом значения углов ϕ1,ϕ2 и максимальное значение α принимают постоянными на всем этапе выведения. В результате этого высоты апогея, перигея и величина наклонения плоскости орбиты к экватору достигают заданных значений конечной орбиты одновременно естественным образом, т. е. без специального управления каждым параметром орбиты отдельно со стороны системы управления. Благодаря постоянству заданных угловых величин ϕ1,ϕ2 и α функцией системы управления является лишь своевременное включение ДУ МТ и отслеживание достижения заданных заранее величин управляющих углов в зависимости от ν. Это не требует перерасчета величины угла отклонения вектора тяги по рысканию α для каждой промежуточной орбиты, что упрощает и, значит, удешевляет систему управления. Кроме этого, не требуется постоянный баллистический контроль параметров текущей орбиты с целью перерасчета величины угла отклонения вектора тяги по рысканию α, что также снижает затраты на управление выведением КА на заданную рабочую орбиту.
ЛИТЕРАТУРА
1. В. Н. Лебедев. Расчет движения космического аппарата с малой тягой. Математические методы в динамике космических аппаратов. Выпуск 5, ВЦ АН СССР, М., 1968, с.47-50.
2. Заявка RU 97105571, 6 В 64 G 1/00, приоритет 05.04.96, опубликована 04.04.97.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСТАЦИОНАРНУЮ ОРБИТУ С ИСПОЛЬЗОВАНИЕМ ДВИГАТЕЛЕЙ МАЛОЙ ТЯГИ | 2001 |
|
RU2207306C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АКТИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА, СТЫКУЕМОГО С ПАССИВНЫМ КОСМИЧЕСКИМ ОБЪЕКТОМ | 2010 |
|
RU2440281C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНОЙ КОСМИЧЕСКОЙ СИСТЕМОЙ | 2015 |
|
RU2605463C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АКТИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА, СТЫКУЕМОГО С ПАССИВНЫМ КОСМИЧЕСКИМ ОБЪЕКТОМ | 2010 |
|
RU2441821C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНОЙ КОСМИЧЕСКОЙ СИСТЕМОЙ | 2015 |
|
RU2614466C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНОЙ КОСМИЧЕСКОЙ СИСТЕМОЙ ПРИ ПЕРЕЛЁТЕ КОСМИЧЕСКОГО КОРАБЛЯ С ОРБИТЫ ЛУНЫ НА ОРБИТУ ЗЕМЛИ | 2019 |
|
RU2725091C1 |
| СПОСОБ ОДНОВРЕМЕННОГО ВЫВЕДЕНИЯ ГРУППЫ СПУТНИКОВ НА НЕКОМПЛАНАРНЫЕ ОРБИТЫ (ВАРИАНТЫ) | 2015 |
|
RU2583507C1 |
| СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСТАЦИОНАРНУЮ ОРБИТУ С ИСПОЛЬЗОВАНИЕМ ДВИГАТЕЛЕЙ МАЛОЙ ТЯГИ | 2014 |
|
RU2586945C2 |
| СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКОГО АППАРАТА НА ЦЕЛЕВУЮ ОРБИТУ | 2024 |
|
RU2837937C1 |
| СПОСОБ УПРАВЛЕНИЯ КИНЕТИЧЕСКИМ МОМЕНТОМ КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ КОРРЕКЦИИ ОРБИТЫ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2178761C1 |
Использование: в космической технике. Сущность изобретения: способ выведения космического аппарата на заданную орбиту с использованием двигателей малой тяги состоит в выведении космического аппарата с помощью средств выведения с двигателем большой тяги на начальную эллиптическую орбиту с высотой перигея ниже высоты перигея заданной орбиты, высотой апогея выше высоты апогея заданной орбиты и величиной наклонения плоскости орбиты, также отличной от величины наклонения заданной орбиты, и включает участки торможения в области перигея и участки разгона с изменением наклонения орбиты в области апогея, причем величины угловых секторов работы двигателей малой тяги в области апогея и перигея и максимальную величину угла отклонения вектора тяги по рысканию выбирают постоянными для всего этапа выведения. Технический результат - упрощение и удешевление системы управления и самого процесса управления выведением космического аппарата на конечную заданную орбиту. 1 ил.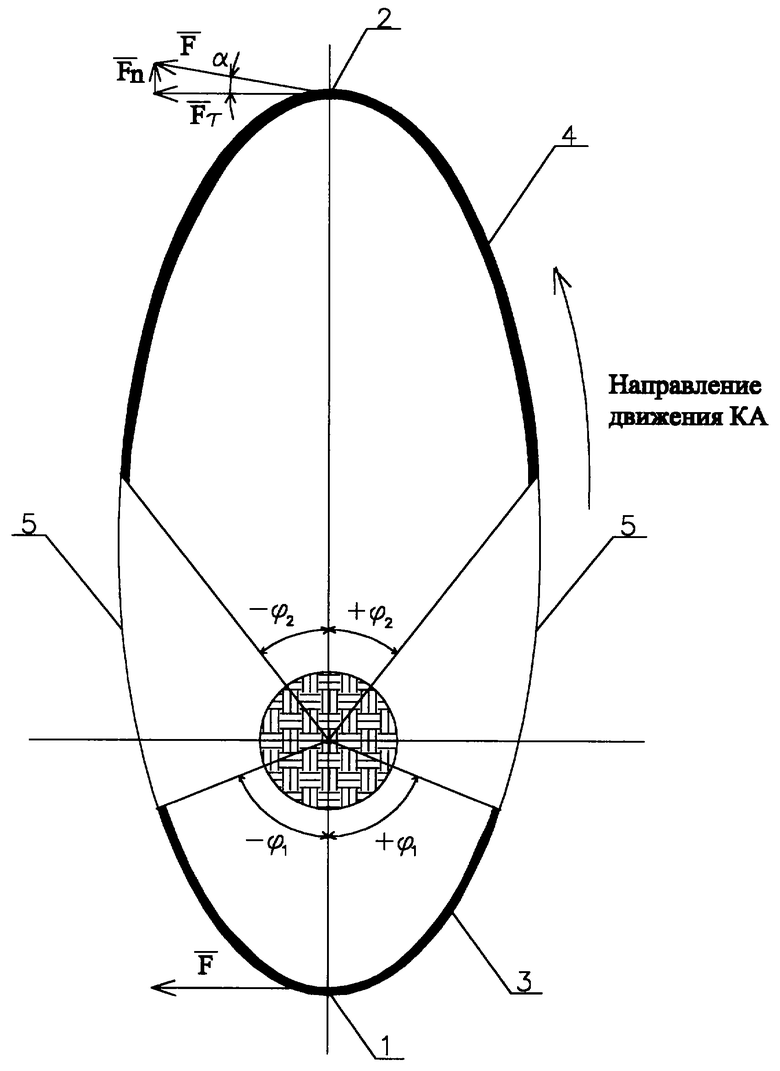
Способ выведения космического аппарата на заданную орбиту с использованием двигателей малой тяги, состоящий в выведении космического аппарата с помощью средств выведения с двигателем большой тяги на начальную эллиптическую орбиту с высотой перигея ниже высоты перигея заданной орбиты, высотой апогея выше высоты апогея заданной орбиты и величиной наклонения плоскости орбиты, также отличной от величины наклонения заданной орбиты, и включающий участки торможения в области перигея и участки разгона с изменением наклонения орбиты в области апогея, отличающийся тем, что величины угловых секторов истинной аномалии (ν), в которых работают двигатели малой тяги в указанных областях апогея и перигея, и максимальную величину угла отклонения вектора тяги по рысканью выбирают постоянными для всего этапа выведения, причем значения углов Ф1 и Ф2 указанных угловых секторов истинной аномалии, соответственно в области перигея (ν=±Ф1) и области апогея (ν=180o±Ф2), выбирают меньшими 90o.
| СПОСОБ ВЫВЕДЕНИЯ СПУТНИКА НА ГЕОСТАЦИОНАРНУЮ ОРБИТУ | 1999 |
|
RU2164880C1 |
| СПОСОБ ВЫВОДА ИСКУССТВЕННОГО СПУТНИКА НА ГЕОСТАЦИОНАРНУЮ ОРБИТУ | 1998 |
|
RU2162050C1 |
| US 6182928 B1, 09.10.1998 | |||
| ГИГИЕНИЧЕСКИЙ СМЕСИТЕЛЬ | 2019 |
|
RU2768399C1 |

