Предлагаемый способ управления может быть использован в космической технике при выведении космического корабля (КК), находящегося на окололунной орбите на заданную околоземную орбиту.
Для перелета к Земле с орбиты Луны необходимо выполнить отлетный импульс, величина которого в зависимости от высоты и вида окололунной орбиты варьируется от 450 до 950 м/с. Нижняя оценка соответствует отлету с гало-орбиты NRHO (Near Rectilinear Halo Orbit), на которой планируется развернуть будущую окололунную станцию Deep Space Gateway [1. Whitley R., Martinez R., 2015 "Options for Staging Orbits in Cis-Lunar Space", https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20150019648.pdf]. Эта орбита является высокоэллиптической с высотой в периселении около 2500 км и в апоселении около 70000 км. Оптимальный отлетный импульс разбивается на два. Первый импульс ~250 м/с выполняется при сходе с орбиты NRHO для пролета Луны на заданном расстоянии, а второй импульс ~200 м/с - пертурбационный при пролете Луны [1]. Верхняя оценка соответствует низкой окололунной круговой орбите высотой 100÷200 км [2. Е.В. Тарасов, «Космонавтика», Машиностроение, 1977]. Отлетный импульс определяется таким образом, чтобы пройти относительно Земли на заданном расстоянии Н, соответствующем высоте заданной околоземной орбиты, на которой, например, может располагаться орбитальная станция. После отлета КК движется по геоцентрической орбите с перигеем высотой Н, а скорость в перигее ~11.0 км/с, что близко к 2-ой космической скорости [2]. Для снижения скорости до 1-ой космической (~8 км/с) и перехода на заданную околоземную орбиту требуется приложения к КК тормозного импульса [2].
Определим величину импульса V1 для перевода КК на круговую околоземную орбиту высотой Н=400 км:
где μ - гравитационный параметр Земли, 
r - радиус орбиты Земли и r=Н+r3, где
r3=6378 км - радиус Земли [2],
ν∞ - скорость входа (скорость на бесконечности) в перицентре высотой Н=400 км геоцентрической орбиты при перелете от Луны к Земле в течение 3.5 суток составит  Таким образом, подставляя в формулу (2) необходимые значения получим V1~3200 м/с.
Таким образом, подставляя в формулу (2) необходимые значения получим V1~3200 м/с.
Известен способ управления, выбранный в качестве аналога, в котором для выведения КК на заданную околоземную орбиту посредством отлетного импульса Vотл формируется траектория пролета Земли на заданном высоте Н. Точка прохождения на заданном расстоянии от Земли является одновременно и точкой заданной околоземной орбиты. В окрестности этой точки выполняется тормозной импульс V1 для перевода КК с перелетной орбиты на заданную орбиту вокруг Земли [3. В.И. Левантовский, «Механика космического полета в элементарном изложении», Наука, 1980 г.].
Несмотря на самый простой и быстрый переход на заданную орбиту, недостатком этого способа является значительная величина тормозного импульса V1 требующая больших затрат топлива и, соответственно мощного разгонного блока (РБ). В условиях дефицита топлива этот фактор может быть критическим.
Известен способ управления движением КО при перелете с орбиты Луны на орбиту Земли, выбранный в качестве прототипа [4. Муртазин Р.Ф. Способ управления транспортной космической системой. Патент 2605463 РФ. М.: Роспатент, ФИПС, бюл. №35, 2016], включающий приложение к КК отлетного импульса Vотл для перелета с окололунной орбиты по траектории с прохождением от Земли на заданной высоте Н и выполнение аэродинамического торможения с заданными изменениями параметров
орбиты КК в процессе его последовательных прохождений на заданном расстоянии от Земли, для чего после каждого прохождения апогея орбиты прикладывают корректирующий импульс Vкор, для формирования заданной высоты орбиты перигея Нπ до выполнения условия Нα=НОС, где Нα - высота апогея орбиты КК, НОС - высота заданной околоземной орбиты, после чего в апогее орбиты прикладывают импульс перехода Vпер на круговую орбиту НОС. Из-за расположения высоты Н в атмосфере Земли, за счет аэроторможения обеспечивается снижение скорости КК до 1-ой космической скорости по методу «тормозных» эллипсов [3]. После очередного прохода КК в атмосфере и снижения высоты апогея Нα до заданной высоты околоземной орбиты НОС, прикладывая к КК в апогее разгонный импульс Vпер можно поднять перигей орбиты до высоты НОС, после чего КК переходит на заданную околоземную орбиту. На этой орбите может располагаться ОС, с которой проводят сближение и стыковку.
Этот способ позволяет отказаться от большого импульса торможения V1, что позволяет сэкономить значительное количество топлива.
Основными недостатками такого способа управления являются необходимость иметь аэродинамический зонт с многоразовой теплозащитой и длительное время полета по переходным «тормозным» эллипсам [4], что приводит к необходимости неоднократно пересекать радиационные пояса Земли. Многоразовый аэродинамический зонт требует дополнительных ответственных профилактических работ на околоземной ОС при подготовке последующих перелетов, что также существенно увеличивает стоимость эксплуатации транспортной системы (ТС).
Техническим результатом изобретения является сокращение длительности полета КК по «тормозным» эллипсам, что снизит объем ответственных профилактических работ на околоземной ОС и приведет к снижению стоимости ТС.
Технический результат достигается благодаря тому, что в способе управления транспортной космической системой при перелете КК с орбиты Луны на орбиту Земли, включающий приложение к КК отлетного импульса Vотл для перелета с окололунной орбиты по траектории с прохождением от Земли на заданной высоте Н и выполнение аэродинамического торможения с заданными изменениями параметров орбиты КК в процессе его последовательных прохождений на заданном расстоянии от Земли, для чего после каждого прохождения апогея орбиты прикладывают корректирующий импульс Vкор, для формирования заданной высоты орбиты перигея Нπ до выполнения условия Нα=НОС, где Нα - высота апогея орбиты КК, НОС - высота заданной околоземной орбиты, после чего в апогее орбиты прикладывают импульс перехода Vпер на круговую орбиту НОС, в отличие от известного, определяют отлетный импульс Vотл для прохождения на высоте Н от Земли без аэродинамического зонта, определяют высоту апогея начальной переходной эллиптической орбиты Нαн с учетом энергетических возможностей КК по выполнению импульса величиной V1 для перевода КК на начальную переходную эллиптическую орбиту с высотой апогея Нαн, по достижению высоты Н от Земли к КК прикладывают тормозной импульс V1 для его перевода на начальную переходную эллиптическую орбиту с высотой апогея Нαн, после чего КК стыкуют с космическим аппаратом (КА), несущим аэродинамический зонт и топливо для дозаправки КК, достаточное для реализации повторного полета на окололунную орбиту, и предварительно запущенным на начальную переходную эллиптическую орбиту, определенную с учетом энергетических возможностей КК, проводят дозаправку КК топливом, затем отстыковывают КА от КК с аэродинамическим зонтом, и, при прохождении апогея орбиты Нα, к КК прикладывают тормозной импульс V2 для его перевода на орбиту с заданной высотой перигея Нπ и выполнения аэродинамического торможения, а, после достижения высоты апогея Нα=НОС, в апогее орбиты высотой НОС к КК
прикладывают разгонный импульс Vпер для перехода на заданную околоземную орбиту.
Технический результат в предлагаемом способе управления достигается за счет того, что, по сравнению с прототипом КК доставляется на окололунную орбиту без аэродинамического зонта, что существенно улучшает массовые характеристики КК, так как его масса оценивается в 25% от массы КК. Кроме того КА, доставляющий на начальную эллиптическую орбиту аэродинамический зонт может выполнить дозаправку КК для обеспечения выполнения последующих полетов. Это позволит улучшить стоимостные характеристики ТС. Также, за счет частичного торможения КК у Земли, последующий вход КК в атмосферу будет выполняться с меньшей скоростью, что позволяет уменьшить массовые характеристики аэродинамического зонта.
Сущность изобретения поясняется на фиг. 1+3, где:
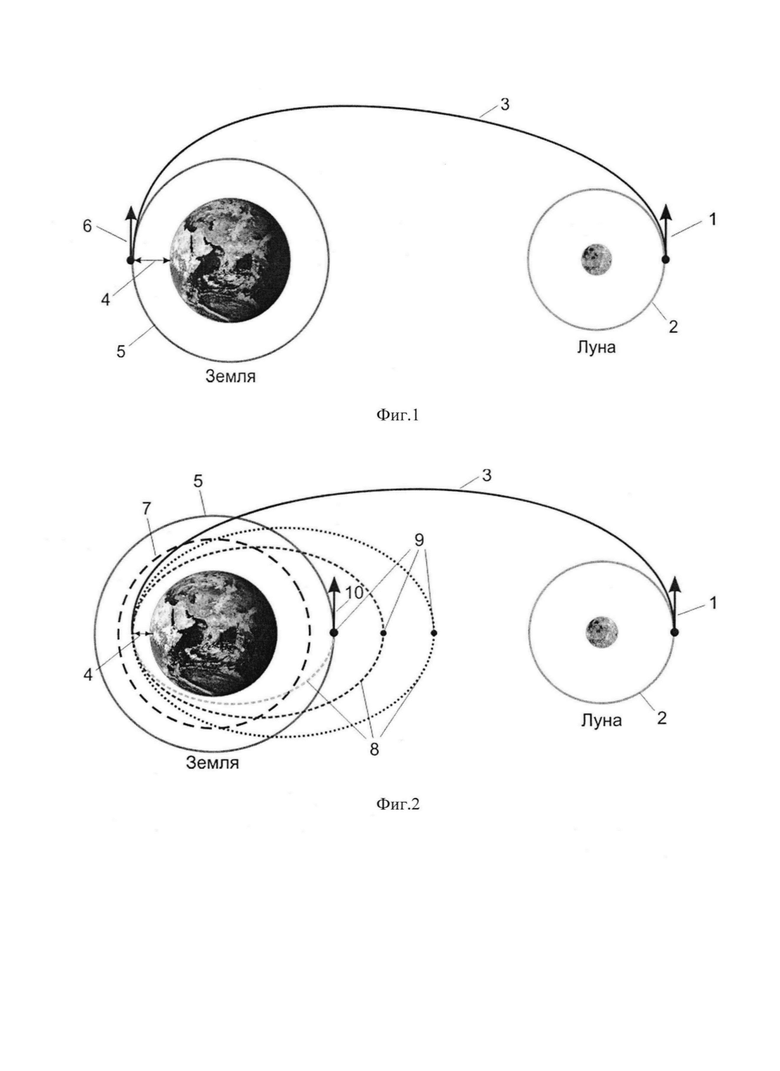
на фиг. 1 показана схема выведения на круговую околоземную орбиту при помощи одного тормозного импульса V1 по способу-аналогу;
на фиг. 2 показана схема выведения на круговую околоземную орбиту с использованием аэроторможения по способу- прототипу;
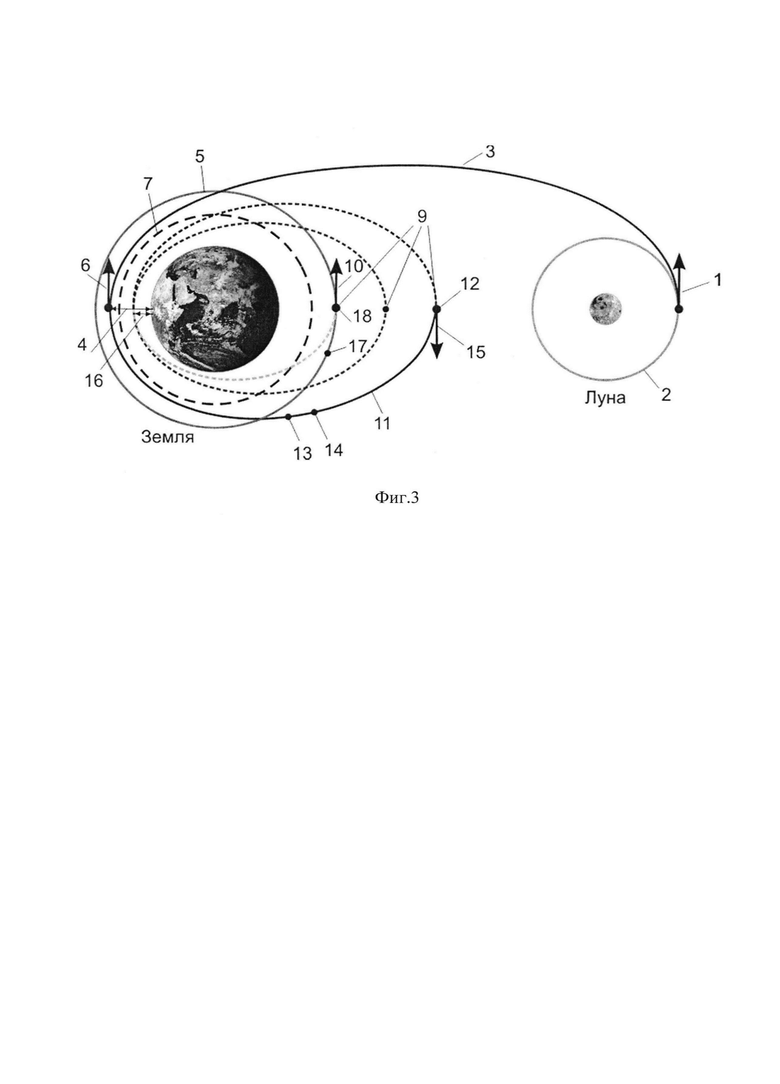
на фиг. 3 показана схема выведения на круговую околоземную орбиту при использовании РБ и КА с аэродинамическим зонтом по предлагаемому способу управления;
На фиг. 1 показана схема выведения аналога на круговую околоземную орбиту при помощи одного тормозного импульса V1. Вначале КК отлетным импульсом Vотл (1) с окололунной орбиты (2) переводится на траекторию полета к Земле (3) с пролетом относительно Земли на расстоянии, соответствующем высоте Н (4). Точка прохождения на заданном расстоянии от Земли является одновременно и точкой заданной околоземной орбиты (5). В окрестности этой точки выполняется тормозной импульс V1 (6) для перевода КК с перелетной орбиты на заданную орбиту вокруг Земли.
На фиг. 2 показана схема выведения на круговую околоземную орбиту с использованием способа-прототипа. Вначале, также как и способе-аналоге, К с отлетным импульсом Vотл (1) с окололунной орбиты (2) переводится на траекторию полета к Земле (3) с пролетом относительно Земли на расстоянии, соответствующем высоте Н (4). Из-за расположения высоты Н в атмосфере Земли (7), за счет аэроторможения обеспечивается снижение скорости КК до 1-ой космической скорости путем последовательных погружений в атмосферу и переходом на «тормозные» эллипсы (8), с монотонно уменьшающейся высотой апогея Нαi (9). И наконец, после очередного прохода КК в атмосфере и снижения высоты апогея промежуточного эллипса Нα до заданной высоты HOC околоземной орбиты (5) к КК в апогее прикладывается разгонный импульс Vпер (10) для подъема перигея орбиты с высоты Н до высоты HOC, после чего КК переходит на заданную околоземную орбиту. На этой орбите может располагаться ОС, с которой впоследствии КК выполняет сближение и стыковку.
На фиг. 3 показана схема выведения на круговую околоземную орбиту по предлагаемому способу управления. Вначале КК выполняет отлетный импульс Vотл (1) посредством которого формируется траектория полета к Земле (3) на заданном высоте Н (4), превышающей высоту атмосферы Земли (7). В окрестности этой точки выполняется тормозной импульс V1 (6) для перевода КК с орбиты (3) на переходную эллиптическую орбиту вокруг Земли (11) с заданной высотой апогея Нα (12). Затем КК стыкуется с КА (13), несущем аэродинамический зонт и предварительно запущенным на эту эллиптическую орбиту. КА также доставляет и топливо для дозаправки КК, достаточное для реализации повторного полета КК на окололунную орбиту. После дозаправки КК топливом КА отстыковывается (14), а КК в апогее выполняет тормозной импульс V2 (15), чтобы уменьшить высоту перигея орбиты до заданной Нπ (16) внутри атмосферы Земли и выполнения аэродинамического торможения. После выполнения нескольких погружений в атмосферу, за счет аэроторможения текущая высота апогея Нα достигнет
высоты орбиты станции HOC. Аэродинамический зонт отделяется от КК (17), освобождая стыковочный узел для стыковки с ОС, после чего в апогее высотой HOC (18) к КК прикладывают разгонный импульс Vпер (10) для перехода на орбиту ОС (5). Затем КК стыкуется с ОС.
Предлагаемый способ рассмотрим на примере. Пусть в качестве заданной околоземной орбиты (5) рассматривается круговая орбита высотой 400 км. Рассмотрим задачу перелета КК с круговой орбиты вокруг Луны (2) высотой 100 км. Схема перелета включает отлетный импульс Vотл (1), формирующий пролет у Земли на расстоянии около 200 км, тормозной импульс V1 (6) для перевода КК на переходную эллиптическую орбиту вокруг Земли. Величина тормозного импульса соответствует всему оставшемуся в КК топлива на момент пролета Земли на расстоянии превышающим высоту атмосферы Земли (4), например 200 км. После перехода на начальную эллиптическую орбиту с высотой апогея Нαн КК стыкуется с КА (13), несущим аэродинамический зонт и предварительно запущенным на начальную переходную эллиптическую орбиту. КА также доставляет на эту орбиту топливо для дозаправки КК, достаточного чтобы КК выполнил следующий полет на заданную окололунную орбиту. После дозапрвки КА отстыковывается (14), а КК в апогее выполняет тормозной импульс (15), чтобы уменьшить высоту перигея орбиты до заданной Нπ (16), расположенной внутри атмосферы Земли и выполнения аэродинамического торможения. После выполнения нескольких погружений в атмосферу, за счет аэроторможения текущая высота апогея Нα достигнет высоты орбиты станции HOC. Аэродинамический зонт отделяется от КК, освобождая стыковочный узел для стыковки с ОС, после чего в апогее высотой HOC к КК прикладывают разгонный импульс Vпер (10) для перехода на заданную околоземную орбиту (5). Затем КК стыкуется с ОС. Оптимизация предлагаемого способа заключается в определении высоты апогея Нαн - начальной переходной эллиптической орбиты, позволяющей полностью использовать топливо КК на окололунной орбите и минимизировать размерность КА с аэродинамическим зонтом.
Рассмотрим пример. Предположим, что сухая отлетная масса КК с окололунной орбиты составляет Мсух=6000 кг. Пусть в качестве окололунной орбиты КК рассматривается, описанная выше гало-орбита NRHO. Определим потребное топливо, которое необходимо КК для достижения ΔVпотр~1000 м/с. исходя из удельного импульса в 334 сек [4. Вестник НПО им. Лавочкина №2, 2017].
Согласно формуле Циолковского [2]:

где m0 - начальная отлетная масса КК m0=Мсух+Мтопл, а mк - конечная масса или mк=Мсух. Очевидно, преобразуя формулу (2) получим:

т.е. отлетная масса КК с окололунной орбиты m0=Мсух+Мтопл=7.5 тн. Из соответствующей этой массе топлива характеристической скорости ΔVпотр~1000 м/с необходимо вычесть величину отлетного импульса Vотл, чтобы получить располагаемую величину тормозного импульса V1 для перевода КК на начальную переходную высокоэллиптическую орбиту вокруг Земли с высотой апогея Нαн.

Если отлетная скорость к Луне с околоземной орбиты высотой 200 км к Луне в импульсной постановке составляет около 3150 м/с [2], то с учетом значения V1 можно принять, что для достижения переходной эллиптической орбиты с низкой околоземной орбиты к КК должен быть приложен импульс

Т.е. в перигее эллиптической орбиты скорость определяется как  По величине V определим высоту апогея Нαн начальной переходной эллиптической орбиты, используя формулу для энергии орбиты [2]:
По величине V определим высоту апогея Нαн начальной переходной эллиптической орбиты, используя формулу для энергии орбиты [2]:
где  - большая полуось орбиты. Подставляя известные значения в формулу (4) можно получить:
- большая полуось орбиты. Подставляя известные значения в формулу (4) можно получить:

или Нαн~51.6 тыс. км.
Определим массу топлива КА с аэродинамическим зонтом, выводимого на начальную переходную эллиптическую орбиту. Будем ориентироваться на грузоподъемность РН в 8400 кг [5. Isakowittz S. International Reference Guide to Space Launch Systems Forth edition, 2004]. По формуле Циолковского можно определить конечную массу КА mК на начальной переходной эллиптической орбите с высотой апогея Нαн:

Если принять сухую массу КА с аэродинамическим зонтом Мсух=1885 кг, то масса доставляемая для дозаправки КК топлива Мтдз=mк-Мсух=2000 кг. Если сравнивать это значение с Мтопл=1500 кг, необходимое для перехода КК с окололунной орбиты на переходную эллиптическую орбиту, полученное ранее, то можно констатировать достаточность доставки топлива на КА для дозаправки КК для его последующего полета по маршруту ОС-лунная станция-ОС.
Предлагаемый способ может быть использован при управлении ТС, позволяющей делать перелеты с окололунной ОС на околоземную ОС.
Изобретение относится к управлению транспортной системой (ТС) при перелетах космического корабля (КК) с окололунной на околоземную орбитальную станцию (ОС). Способ включает выполнение КК перелета от Луны к Земле по траектории с пролетом Земли на заданной высоте без аэродинамического зонта. По достижении этой высоты выполняют тормозной импульс для перевода КК на переходную эллиптическую орбиту вокруг Земли, где КК стыкуется с КА, несущим аэродинамический зонт для торможения КК в атмосфере. Кроме того, КА несёт топливо дозаправки КК для проведения его следующего полета к окололунной ОС. После расстыковки с КА в апогее орбиты КК выполняет тормозной импульс с целью перехода на орбиту с заданной высотой перигея для проведения торможения в атмосфере по методу «тормозных» эллипсов. После снижения апогея орбиты КК до высоты орбиты околоземной ОС аэродинамический зонт отделяется, и в этом апогее КК импульсно переводят на орбиту ОС. После стыковки с ОС и профилактических работ КК готов к следующему полету к лунной ОС. Техническим результатом является сокращение длительности полета КК по «тормозным» эллипсам и снижение тем самым объема профилактических работ на ОС, с возможностью выведения указанного выше КА посредством РН среднего класса. 3 ил.
Способ управления транспортной космической системой при перелете космического корабля с орбиты Луны на орбиту Земли, включающий приложение к космическому кораблю отлетного импульса Vотл для перелета с окололунной орбиты по траектории с прохождением от Земли на заданной высоте Н и выполнение аэродинамического торможения с заданными изменениями параметров орбиты космического корабля в процессе его последовательных прохождений на заданном расстоянии от Земли, для чего после каждого прохождения апогея орбиты прикладывают корректирующий импульс Vкор для формирования заданной высоты орбиты перигея Нπ до выполнения условия Нα=НОС, где Нα - высота апогея орбиты космического корабля, НОС - высота заданной околоземной орбиты, после чего в апогее орбиты прикладывают импульс перехода Vпер на круговую орбиту НОС, отличающийся тем, что определяют отлетный импульс Vотл для прохождения на высоте Н от Земли без аэродинамического зонта, определяют высоту апогея начальной переходной эллиптической орбиты Нαн с учетом энергетических возможностей космического корабля по выполнению импульса величиной V1 для перевода космического корабля на начальную переходную эллиптическую орбиту с высотой апогея Нαн, по достижении высоты Н от Земли к космическому кораблю прикладывают тормозной импульс V1 для его перевода на начальную переходную эллиптическую орбиту с высотой апогея Нαн, после чего космический корабль стыкуют с космическим аппаратом, несущим аэродинамический зонт и топливо для дозаправки космического корабля, достаточное для реализации повторного полета на окололунную орбиту, и предварительно запущенным на начальную переходную эллиптическую орбиту, определенную с учетом энергетических возможностей космического корабля, проводят дозаправку космического корабля топливом, затем отстыковывают космический аппарат от космического корабля с аэродинамическим зонтом, и, при прохождении апогея орбиты Нα, к космическому кораблю прикладывают тормозной импульс V2 для его перевода на орбиту с заданной высотой перигея Нπ и выполнения аэродинамического торможения, а после достижения высоты апогея Нα=НОС, в апогее орбиты высотой НОС к космическому кораблю прикладывают разгонный импульс Vпер для перехода на заданную околоземную орбиту.
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНОЙ КОСМИЧЕСКОЙ СИСТЕМОЙ | 2015 |
|
RU2605463C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНОЙ КОСМИЧЕСКОЙ СИСТЕМОЙ | 2015 |
|
RU2614466C2 |
| RU 2004137448 A, 10.06.2006 | |||
| US 6364252 B1, 02.04.2002 | |||
| В.И | |||
| Левантовский | |||
| Механика космического полёта в элементарном изложении | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| "Наука" | |||
| М., 1980, с.256, 259, 262, 274. | |||

