Изобретение относится к области автоматического регулирования тепловых двигателей и может быть использовано в машиностроении при производстве топливной аппаратуры двигателей.
Известен способ регулирования двигателей по отклонению регулируемого параметра - скорости вала двигателя от заданного значения, реализованный в так называемых одноимпульсных системах автоматического регулирования, широко применяемых в машиностроении (Крутов В.И. Автоматическое регулирование двигателей внутреннего сгорания. М.: Машиностроение, 1968, с. 97-118).
Известен также способ двухимпульсного регулирования, когда при формировании управляющего сигнала наряду с сигналом об изменении скорости вала двигателя используют также сигнал об изменении нагрузки на валу двигателя (Крутов В. И. Автоматическое регулирование двигателей внутреннего сгорания. М. : Машиностроение, 1968, с. 272-286). Поскольку прямое измерение момента сопротивления на валу двигателя связано со значительными трудностями, в известных двухимпульсных системах автоматического регулирования для оценки нагрузки на валу двигателя используется косвенный параметр - производная от скорости вала двигателя. Например, в механических всережимных регуляторах используют механическое дифференцирующее устройство (Двухимпульсный регулятор по скорости и ускорению двигателя внутреннего сгорания. А.С. СССР 981654, F 02 D 01/08). В электронных системах автоматического регулирования двигателей с помощью дифференцирующего устройства выделяют сигнал производной от регулируемого параметра - скорости вала двигателя - и используют его при формировании управляющего сигнала (Регулятор числа оборотов двигателя. А.С. СССР 708065, F 02 D 31/00). В качестве прототипа принят способ автоматического регулирования, описанный в (Крутов В.И. Автоматическое регулирование двигателей внутреннего сгорания. М.: Машиностроение, 1968, с. 272-286), а прототипа устройства для реализации способа двухимпульсного регулирования двигателя - регулятор, описанный в (Двухимпульсный регулятор по скорости и ускорению двигателя внутреннего сгорания. А. С. СССР 981654, F 02 D 01/08).
Недостатком известного способа двухимпульсного автоматического регулирования скорости вала двигателя и известных устройств, реализующих этот способ, является то, что для оценки нагрузки на валу двигателя используют не прямой, а косвенный параметр регулирования - производную от скорости вала двигателя, для чего приходится применять дифференцирующие устройства, чувствительные к шумам в системе регулирования, а для устранения влияния шумов применять фильтры, что усложняет систему регулирования.
Решаемая изобретением задача направлена на повышение эффективности и точности системы автоматического регулирования скорости вала двигателя за счет формирования структуры системы автоматического регулирования на основе адаптивных методов оценивания нагрузки на валу двигателя и использования в системе регулирования информации о действующем моменте сопротивления на валу двигателя и скорости его изменения.
Таким образом, предлагается способ трехимпульсного автоматического регулирования скорости вала двигателя.
Технический результат достигается путем совершенствования известного способа автоматического регулирования скорости вала теплового двигателя, заключающегося в том, что управляющий сигнал на исполнительное устройство изменения топливоподачи в двигатель формируют с использованием сигнала ошибки регулирования скорости вала двигателя и дополнительного сигнала, косвенно учитывающего изменение момента сопротивления на валу двигателя, за счет того, что при работе двигателя непрерывно оценивают момент сопротивления на валу двигателя и скорость его изменения и используют эти оценки при формировании управляющего сигнала.
Несмещенные оценки момента сопротивления на валу двигателя и скорости его изменения получают с помощью наблюдателя вектора состояния системы, на первый вход которого подают сигнал с датчика положения органа топливоподачи, а на второй - с датчика скорости вала двигателя. На выходах наблюдателя получают оценки момента сопротивления на валу двигателя и скорости его изменения, а также оценку скорости вала двигателя, которые подают на вход регулятора, связанного первым входом с первым выходом наблюдателя, вторым входом - со вторым выходом наблюдателя, третьим входом - с третьим выходом наблюдателя, четвертым входом - с датчиком положения органа топливоподачи, пятым входом - с задатчиком скорости вала двигателя, а выходом - со входом исполнительного устройства.
При формировании структуры наблюдателя вектора состояния системы используют стохастическую стационарную модель двигателя
где FД(ω) - относительный момент двигателя по внешней характеристике (при) 
 относительное положение органа топливоподачи (например, рейки топливного насоса),
относительное положение органа топливоподачи (например, рейки топливного насоса), - относительный момент сопротивления на валу двигателя,
- относительный момент сопротивления на валу двигателя,
a - параметр объекта регулирования 
МN - момент при номинальной мощности;
IД - момент инерции двигателя.
Структуру наблюдателя вектора состояния представляют в следующем виде:
где ω - скорость вала двигателя, измеряемая датчиком, оценка скорости вала двигателя,
оценка скорости вала двигателя, интегральная составляющая оценки момента сопротивлений на валу двигателя,
интегральная составляющая оценки момента сопротивлений на валу двигателя, относительное положение органа топливоподачи, измеряемое датчиком,
относительное положение органа топливоподачи, измеряемое датчиком,
К4 и К5 - постоянные коэффициенты, значения которых определяют при синтезе наблюдателя.
Входными воздействиями в наблюдателе являются положение органа топливоподачи  и скорость вала двигателя ω, которые измеряют с помощью известных датчиков. На выходах наблюдателя получают оценку момента сопротивления на валу двигателя
и скорость вала двигателя ω, которые измеряют с помощью известных датчиков. На выходах наблюдателя получают оценку момента сопротивления на валу двигателя  оценку скорости изменения момента сопротивления
оценку скорости изменения момента сопротивления  и оценку скорости вала двигателя
и оценку скорости вала двигателя  Указанные оценки используют при формировании управляющего сигнала в регуляторе, который представляют в виде
Указанные оценки используют при формировании управляющего сигнала в регуляторе, который представляют в виде
где  сигнал заданного положения органа топливоподачи;
сигнал заданного положения органа топливоподачи; сигнал положения органа топливоподачи, который получают с помощью известного датчика;
сигнал положения органа топливоподачи, который получают с помощью известного датчика;
Ku - коэффициент усиления.
При регулировании двигателя по предлагаемому способу первую составляющую сигнала заданного положения органа топливоподачи формируют с использованием сигнала ошибки регулирования:
где ωЗ - сигнал заданной скорости вала двигателя, который получают с помощью задатчика скоростного режима, на который воздействия осуществляют от органа управления двигателем либо от внешних задающих устройств; сигнал оценки скорости вала двигателя, который получают с одного из выходов наблюдателя вектора состояния системы;
сигнал оценки скорости вала двигателя, который получают с одного из выходов наблюдателя вектора состояния системы;
К1 - коэффициент усиления.
Отметим, что при формировании первой составляющей заданного положения органа топливоподачи  могут использовать вместо сигнала
могут использовать вместо сигнала  сигнал ω скорости вала двигателя, который получают с помощью датчика.
сигнал ω скорости вала двигателя, который получают с помощью датчика.
Вторую составляющую заданного положения органа топливоподачи определяют с использованием оценки 

Третью составляющую формируют следующим образом:
Определяют суммарный сигнал заданного положения органа топливоподачи
Сигнал заданного положения органа топливоподачи  сравнивают с сигналом
сравнивают с сигналом  который получают с датчика положения органа топливоподачи, и формируют управляющий сигнал
который получают с датчика положения органа топливоподачи, и формируют управляющий сигнал  который подают на исполнительное устройство, изменяющее положение органа топливоподачи.
который подают на исполнительное устройство, изменяющее положение органа топливоподачи.
Поскольку положение органа топливоподачи  устанавливается в соответствии с действующим моментом сопротивления на валу двигателя, на установившемся режиме работы двигателя ошибка регулирования ε = 0.
устанавливается в соответствии с действующим моментом сопротивления на валу двигателя, на установившемся режиме работы двигателя ошибка регулирования ε = 0.
При изменении момента сопротивления на валу двигателя сразу же соответствующим образом изменяются составляющие  за счет чего изменяют заданное положение органа топливоподачи. Качество автоматического регулирования двигателя улучшается.
за счет чего изменяют заданное положение органа топливоподачи. Качество автоматического регулирования двигателя улучшается.
На чертеже показана структурная схема устройства трехимпульсной системы автоматического регулирования скорости вала двигателя, реализующего предлагаемый способ автоматического регулирования двигателя.
Устройство содержит наблюдатель вектора состояния системы 1, регулятор 2, формирующий управляющий сигнал u на исполнительное устройство 3 объекта регулирования, включающего в себя топливный насос высокого давления 4 и тепловой двигатель 5. Положение органа топливоподачи  измеряется с помощью датчика положения органа топливоподачи 6, скорость вала двигателя измеряется с помощью датчика 7. Сигнал заданной скорости вала двигателя формируется задатчиком скорости вала двигателя, включающим в себя селектор задающего сигнала 18, задатчик скоростного режима 8, на который воздействия осуществляются от органа управления двигателем, и внешние задающие устройства скоростного режима 9.
измеряется с помощью датчика положения органа топливоподачи 6, скорость вала двигателя измеряется с помощью датчика 7. Сигнал заданной скорости вала двигателя формируется задатчиком скорости вала двигателя, включающим в себя селектор задающего сигнала 18, задатчик скоростного режима 8, на который воздействия осуществляются от органа управления двигателем, и внешние задающие устройства скоростного режима 9.
Наблюдатель вектора состояния 1 содержит первый элемент сравнения 10 сигналов скорости вала двигателя и ее оценки, выход сигнала ошибки которого связан с входами усилительного устройства 11, один выход которого связан напрямую, а второй через интегратор 12 - с суммирующим устройством 13 и третьим выходом наблюдателя, выход суммирующего устройства 13 связан со вторым выходом наблюдателя 1 и первым входом второго элемента сравнения 14, второй вход которого связан с функциональным преобразователем 17, а выход через усилительное устройство 13 и интегратор 16 - с первым выходом наблюдателя 1.
Регулятор 2 содержит устройство формирования заданного положения органа топливоподачи, включающее в себя элемент сравнения 19 сигналов заданной скорости вала двигателя и оценки скорости вала двигателя, подаваемого с первого выхода наблюдателя 1, усилительное устройство 20, связанное первым входом с выходом сигнала ошибки элемента сравнения 19, вторым входом - со вторым выходом наблюдателя 1, третьим входом - с третьим выходом наблюдателя 1, а выходами - с сумматором 21, и устройство формирования управляющего сигнала, включающее в себя элемент сравнения 22, связанный одним входом с выходом сумматора 21 устройства формирования заданного положения органа топливоподачи, вторым входом - с датчиком положения органа топливоподачи 6, а выходом через усилительное устройство 23 - с исполнительным устройством 3 изменения топливоподачи в двигатель. Регулятор 2 содержит также селектор задающего сигнала 18, связанный входами с задатчиком скоростного режима 8, на который воздействия осуществляются от органа управления двигателем, и с внешними задающими устройствами скоростного режима 9.
Устройство автоматического регулирования скорости вала двигателя работает следующим образом. Сигнал заданной скорости вала двигателя ωЗ устанавливается с помощью задатчика скоростного режима 8 при воздействии на орган управления двигателем или от внешних задающих устройств скоростного режима 9 (например, от системы автоматического переключения передач, от стабилизатора скорости транспортной машины, от системы автоматического запуска двигателя, от противобуксовочной системы и т.д.)
Селектор задающего сигнала 18 пропускает на вход регулятора соответствующий сигнал ωЗ. На элементе сравнения 19 выделяется сигнал ошибки регулирования ε, который подается на первый вход усилительного устройства 20. На второй и третий входы устройства 20 подаются с наблюдателя 1 сигналы, пропорциональные моменту сопротивления  на валу двигателя и скорости изменения момента сопротивления
на валу двигателя и скорости изменения момента сопротивления 
На выходе сумматора 21 формируется сигнал заданного положения органа топливоподачи:
На элементе сравнения 22 сигнал заданного положения органа топливоподачи сравнивается с сигналом  поступающим с датчика положения органа топливоподачи 6, и формируется управляющий сигнал, который усиливается на усилительном устройстве 23:
поступающим с датчика положения органа топливоподачи 6, и формируется управляющий сигнал, который усиливается на усилительном устройстве 23:
Управляющий сигнал подается на вход исполнительного устройства 3, которое устанавливает орган топливоподачи в заданное положение. На установившемся режиме работы двигателя
Поскольку  то на установившемся режиме левая часть уравнения равна 0. Следовательно, равна нулю и правая часть уравнения, а это значит, что ошибка регулирования
то на установившемся режиме левая часть уравнения равна 0. Следовательно, равна нулю и правая часть уравнения, а это значит, что ошибка регулирования  тоже равна нулю.
тоже равна нулю.
При отклонении от установившегося режима изменяются оценки  что сразу отражается на положении органа топливоподачи.
что сразу отражается на положении органа топливоподачи.
Отметим, что в структуре наблюдателя можно принять  Исследования показывают, что такое допущение практически не влияет на качество регулирования, но позволяет упростить конструкцию наблюдателя. При исследовании системы автоматического регулирования двигателя на полунатурной модели получены практически нулевые ошибки регулирования. Система адаптивна к скачкообразным изменениям нагрузки на валу двигателя.
Исследования показывают, что такое допущение практически не влияет на качество регулирования, но позволяет упростить конструкцию наблюдателя. При исследовании системы автоматического регулирования двигателя на полунатурной модели получены практически нулевые ошибки регулирования. Система адаптивна к скачкообразным изменениям нагрузки на валу двигателя.
Достоинством системы автоматического регулирования является также то, что в структуре системы нет дифференцирующих устройств, и в то же время при формировании управляющего сигнала используется оценка непосредственно момента сопротивления на валу двигателя и скорости его изменения, что делает систему помехозащищенной, повышает точность регулирования скорости вала двигателя, снижает стоимость системы в сравнении с известными системами регулирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2234116C1 |
| СПОРТИВНЫЙ ТРЕНАЖЕР | 1994 |
|
RU2128072C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ | 1992 |
|
RU2046618C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ ДИЗЕЛЬ-ГЕНЕРАТОРА В РЕЖИМАХ ХОЛОСТОГО ХОДА И МАЛЫХ НАГРУЗОК | 2022 |
|
RU2795143C1 |
| АВТОМАТИЧЕСКАЯ САМОНАСТРАИВАЮЩАЯСЯ МИКРОПРОЦЕССОРНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ВАЛА ТЕПЛОВОЙ МАШИНЫ | 2012 |
|
RU2504678C1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ДИЗЕЛЯ НА РЕЖИМАХ МАЛЫХ ПОДАЧ И МИНИМАЛЬНО УСТОЙЧИВЫХ ОБОРОТОВ ПОД НАГРУЗКОЙ И ХОЛОСТОГО ХОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2513529C1 |
| Всережимный регулятор частоты вра-щЕНия ТРАНСпОРТНОгО дВигАТЕля ВНуТ-РЕННЕгО СгОРАНия | 1979 |
|
SU850883A1 |
| СТЕНД ОБКАТКИ АВТОТРАКТОРНЫХ ДВИГАТЕЛЕЙ | 1994 |
|
RU2105176C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧАСТОТОЙ ВРАЩЕНИЯ ДИЗЕЛЯ НА РЕЖИМАХ ХОЛОСТОГО ХОДА | 2010 |
|
RU2441169C1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
Изобретение относится к автоматическому регулированию тепловых двигателей и может быть использовано в машиностроении при производстве топливной аппаратуры двигателей. Способ автоматического регулирования скорости вала теплового двигателя заключается в том, что управляющий сигнал на исполнительное устройство изменения топливоподачи в двигатель формируют с использованием сигнала ошибки регулирования и дополнительного сигнала, косвенно учитывающего изменение момента сил сопротивлений на валу двигателя. При работе двигателя непрерывно оценивают момент сил сопротивлений на валу двигателя и скорость его изменения и используют эти оценки при формировании управляющего сигнала. Устройство для осуществления способа автоматического регулирования скорости вала теплового двигателя содержит задатчик скоростного режима, датчик скорости вала двигателя, датчик положения органа топливоподачи, устройство формирования управляющего сигнала и исполнительное устройство. Имеющийся наблюдатель вектора состояния системы связан первым входом с датчиком положения органа топливоподачи, а вторым входом с - датчиком угловой скорости вала двигателя и регулятором. Регулятор связан первым входом с первым выходом наблюдателя, вторым входом - со вторым выходом наблюдателя, третьим входом - с третьим выходом наблюдателя, четвертым входом - с датчиком положения органа топливоподачи, пятым входом - с задатчиком скорости вала двигателя, а выходом - с входом исполнительного устройства. Технический результат заключается в повышении эффективности и точности системы автоматического регулирования скорости вала двигателя за счет формирования структуры системы автоматического регулирования на основе адаптивных методов оценивания нагрузки на валу двигателя и использования в системе регулирования информации о действующем моменте нагрузки на валу двигателя и скорости его изменения. 2 с. и 3 з.п. ф-лы, 1 ил.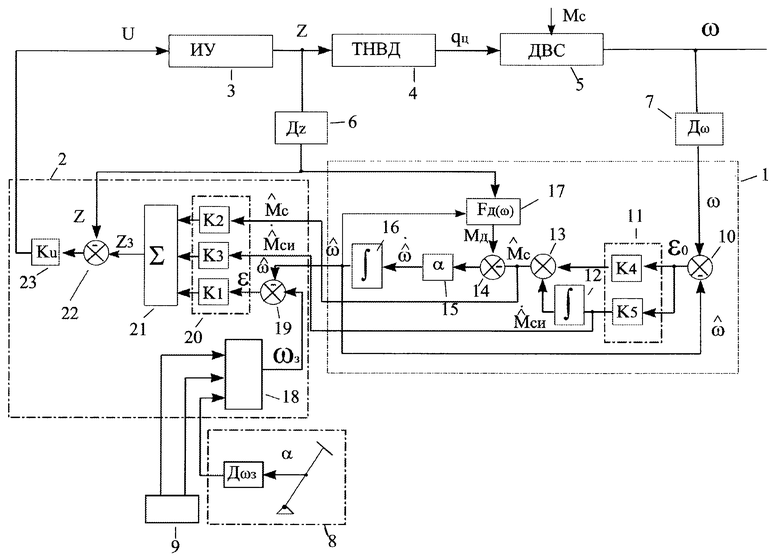
| В.И.КРУТОВ Автоматическое регулирование двигателей внутреннего сгорания | |||
| - М.: Машиностроение, 1968, с.97-118 | |||
| Двухимпульсный регулятор по скорости и ускорению двигателя внутреннего сгорания | 1980 |
|
SU981654A1 |
| Промежуточный привод ленточного конвейера | 1987 |
|
SU1474037A1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА И СПОСОБ РЕГУЛИРОВКИ ЧАСТОТЫ ВРАЩЕНИЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) | 1995 |
|
RU2142567C1 |
| Клеверотерка | 1934 |
|
SU42364A1 |
| DE 3344585 А1, 13.06.1985 | |||
| US 4635601 А, 13.01.1987. | |||

