Область техники
Изобретение относится к области навигационной техники, а именно - к конструкции микромеханических вибрационных гироскопов.
Предшествующий уровень техники
К настоящему времени известно большое количество конструкций вибрационных гироскопов, например, представленных в статье И. Шахновича «МЭМС-гироскопы -единство выбора», журнал «Электроника: Наука, Технология, Бизнес» - системы навигации, 1/2007, стр. 75-85. Принцип действия этих гироскопов основан на использовании инерционной массы в упругом подвесе, которая приводится, например, в колебательное движение. При вращении такой системы по оси, перпендикулярной оси колебаний, на массу действует сила Кориолиса, создающая момент, ортогональный оси колебаний и оси вращения системы, приводящий к угловым смещениям массы, пропорциональным угловой скорости вращения системы. Используются различные конструкции упругих подвесов колеблющейся массы, которые определяют чувствительность и точность вибрационных гироскопов. В статье описаны разнообразные упругие подвесы колеблющейся массы, например, в виде торсионов, полукруглых спиц, Z-образных перемычек.
Аналогом данного изобретения является гироскоп по патенту США №5535902, содержащий диск - резонатор (инерционную массу) в двойном упругом подвесе в виде полукруглых спиц и торсиона. Привод крутильных колебаний использует зубчатую структуру на периферии диска. Определение выходных угловых смещений диска осуществляется с помощью емкостного датчика в виде электродов, взаимодействующих с проводящей поверхностью диска. Недостатки такого гироскопа - сложность упругого подвеса и возможность измерения угловой скорости только относительно одной оси (однокомпонентный гироскоп).
Известен также гибридный микромеханический вибрационный гироскоп по патенту РФ №2485444, 2013, в котором упругий подвес диска-ротора выполнен в виде четырех Г-образных перемычек (названных не вполне корректно «четырьмя спиралями с прямоугольными участками»), помещенных в рамки с дополнительными упругими элементами в виде двух взаимно перпендикулярных торсионов. Привод крутильных колебаний диска содержит печатные обмотки, взаимодействующие с магнитными полями постоянных магнитов. Датчики моментов, компенсирующих выходные угловые смещения диска по двум взаимно перпендикулярным осям (двухкомпонентный гироскоп), также выполнены в виде печатных обмоток и постоянных магнитов. Такая конструкция является весьма сложной, в частности, из-за применения специфичного комбинированного упругого подвеса диска-ротора.
За прототип изобретения принят двухкомпонентный вибрационный гироскоп по патенту США №5511419, в котором центральная часть диска-ротора соединена с корпусом с помощью упругого подвеса в виде двухзаходной многовитковой спиральной пружины. Для определения выходных угловых смещений ротора использованы емкостные датчики. Привод колебательных движений ротора выполнен в виде конденсаторов с подвижными пластинами-электродами, размещенными на периферии ротора. Для обеспечения эффективной работы такого привода требуется вакуумирование рабочей полости прибора, чтобы обеспечить высокую допустимую напряженность электрического поля между пластинами конденсаторов привода, установленных с зазорами порядка нескольких микрометров. Главный недостаток этого гироскопа состоит в том, что двухзаходная спиральная пружина подвеса ротора не обеспечивает равенства мод собственных угловых колебаний ротора, необходимого для обеспечения высокой чувствительности гироскопа.
Приблизиться к этому равенству мод, например, для двух выходных осей ротора, можно при использовании большого числа витков пружины. Однако за этим следует существенное снижение линейных жесткостей по всем трем координатным осям подвеса, что обусловливает соответствующее уменьшение перегрузочной способности гироскопа даже при использовании облегченного ротора с отверстиями при массе, равной десятым долям грамма. В свою очередь это вступает в противоречие со стремлением обеспечить высокую точность измерения угловых скоростей благодаря увеличению кинетического момента ротора при большом моменте инерции по оси крутильных колебаний.
Кроме этого, выполнение большого числа витков пружины, помещенной в центральную часть миниротора, вызывает явные затруднения при изготовлении ее из таких материалов, как кварцевое стекло и кремний.
Сущность изобретения
Технический результат изобретения заключается в повышении точности и упрощении изготовления вибрационного гироскопа с использованием угловых колебаний дискового ротора в упругом подвесе при помощи емкостных датчиков для определения выходных угловых смещений ротора.
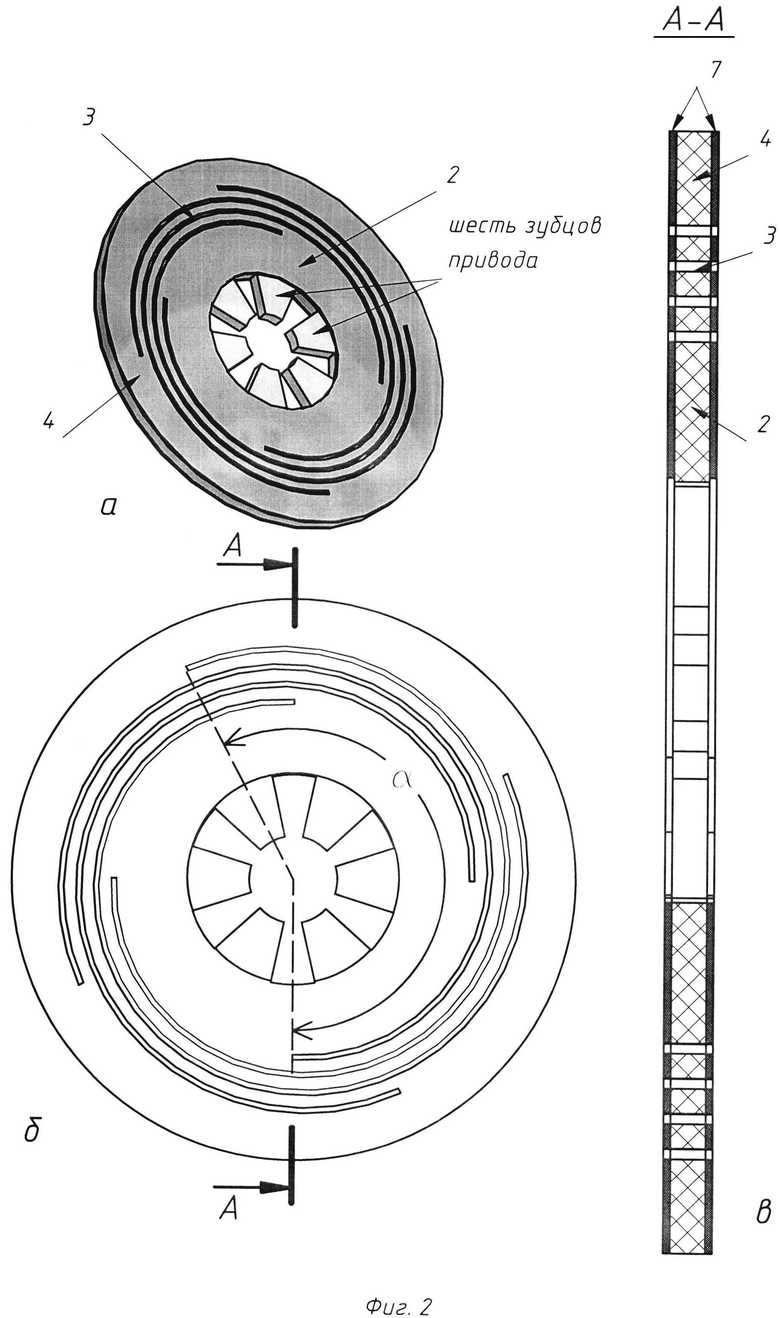
Технический результат достигается тем, что ротор, пружина и неподвижная опора (корпус) выполнены из одной пластины диэлектрического материала, например кварцевого стекла, с электропроводящим покрытием, при этом пружина, соединяющая внешнюю часть ротора с неподвижной опорой, выполнена в виде четырехзаходной спирали с ограниченным разворотом витков на угол, примерно равный α=π(1±0,2), а в центральной части ротора, свободной от электропроводящего покрытия, выполнено отверстие с 2n (n=2, 3, 4…) зубцами для взаимодействия соответственно с 2n электродами привода крутильных колебаний.
Для повышения точности гироскопа ротор, пружина и неподвижная опора могут быть составлены из двух прилегающих друг к другу частей, одна из которых имеет пружину с вращением витков спиралей в сторону, противоположную вращению спиралей другой части.
Перечень чертежей
На фиг. 1 представлен общий вид (а), вид в плане (б) со штриховыми скрытыми линиями и вид в разрезе (в) предложенного гироскопа.
На фиг. 2 показаны ротор, спиральная пружина и неподвижная часть, примененные в гироскопе (а - общий вид, б - вид в плане, в - вид в разрезе) с внутренним отверстием с шестью зубцами в центральной части диэлектрической пластины.
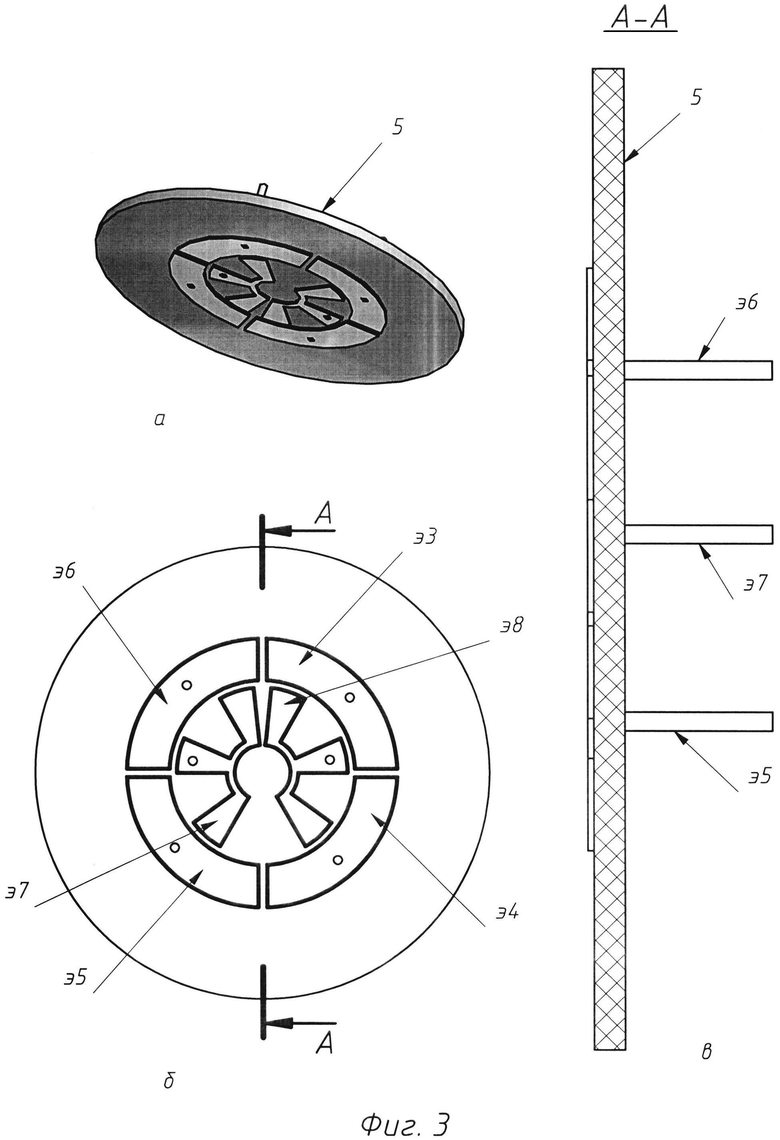
На фиг. 3 показан общий вид (а), вид в плане (б) и разрез (в) одного из статоров гироскопа с выводами от электродов датчиков угловых смещений ротора и электродов привода колебаний ротора.
На фиг. 4 показан активный элемент предложенного гироскопа, составленный из двух частей со спиральными пружинами с разным направлением вращения витков.
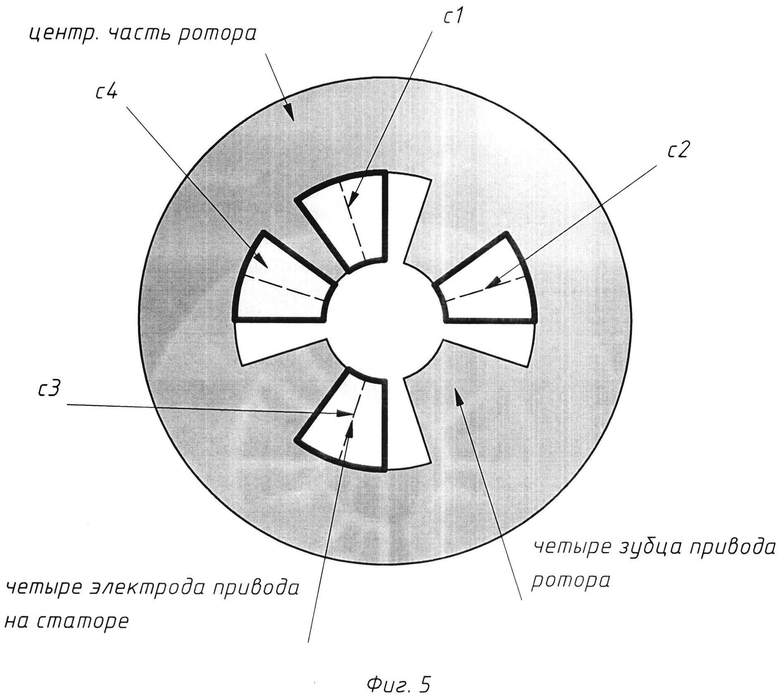
Фиг. 5 иллюстрирует взаимное статическое положение отверстия с зубцами ротора и электродов привода колебаний при четырехзубцовом исполнении.
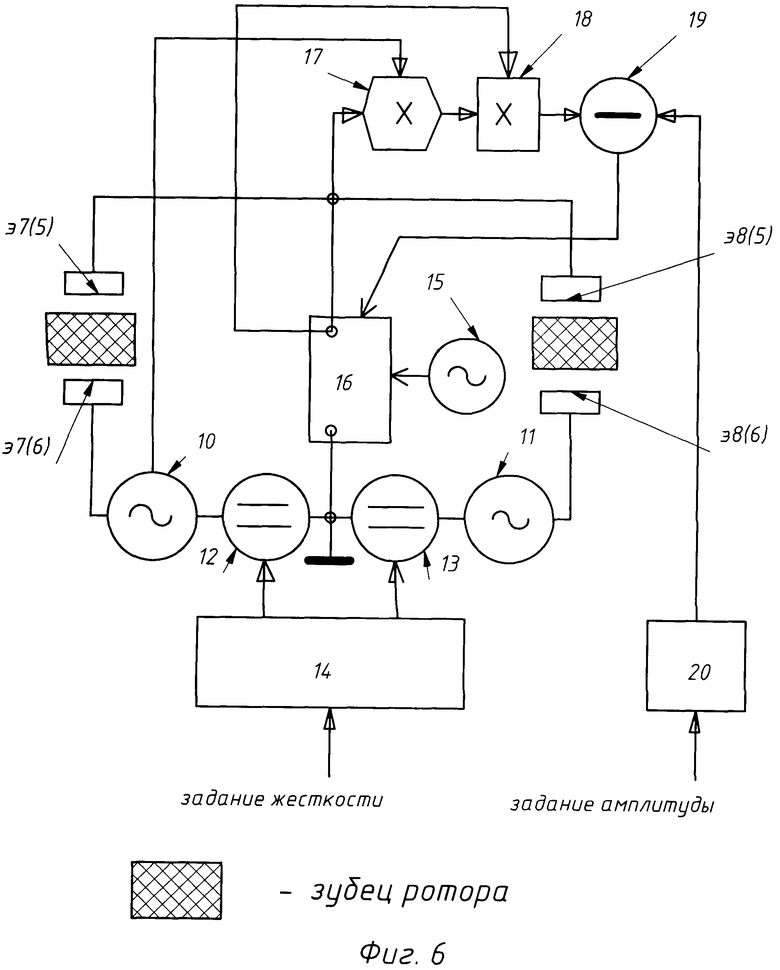
На фиг. 6 показана блок-схема электронного обеспечения привода крутильных колебаний ротора с элементами подстройки моды его угловых колебаний и стабилизации амплитуды этих колебаний.
На фиг. 7 показана блок-схема стабилизации ротора относительно его выходных угловых смещений, определяющих составляющие угловой скорости движения прибора.
На фиг. 1-7 приняты следующие обозначения:
1 - гироскоп,
2 - ротор гироскопа,
3 - спиральная пружина,
4 - неподвижная опора,
5 - первый статор,
6 - второй статор,
7 - электропроводящее покрытие,
8, 9 - проставки,
10, 11 - инвертированные источники высокочастотных напряжений схемы привода,
12, 13 - разнополярные источники опорных постоянных напряжений схемы привода,
14 - регулятор величины опорных напряжений схемы привода,
15 - источник напряжения с частотой колебаний ротора,
16 - усилитель с регулируемым коэффициентом усиления,
17 - высокочастотный демодулятор схемы привода,
18 - низкочастотный демодулятор,
19 - схема сравнения,
20 - задатчик - регулятор амплитуды колебаний ротора,
21 - источник постоянного регулируемого опорного напряжения схемы стабилизации,
22 - источник высокочастотного напряжения схемы стабилизации,
23, 24 - дифференциальные датчики токов емкостных датчиков угловых смещений ротора,
25, 26 - высокочастотные демодуляторы схемы стабилизации,
27, 28 - усилители - инверторы схемы стабилизации.
Вибрационный гироскоп 1 (фиг. 1а) содержит ротор 2 (фиг. 1в), пружину 3 и неподвижную опору 4, выполненные из одной пластины диэлектрического материала (например, кварцевого стекла) с двухсторонним электропроводящим покрытием 7 (например, из напыленного алюминия). Электрические выводы э1 и э2 от покрытий выполнены в виде выступов проставок 8 и 9. Пружина 3, соединяющая внешнюю часть ротора с неподвижной опорой, выполнена в виде четырехзаходной спирали (фиг. 2) с ограниченным разворотом витков на угол, равный α=π(1±0,2). Пружина образована четырьмя спиральными прорезями с углом разворота больше 270° при помощи, например, СВЧ-лазера. В центральной части ротора, свободной от электропроводящего покрытия, выполнено (фиг. 2а) отверстие с 2n (n=2, 3, 4…) зубцами (на фиг. дано исполнение с шестью зубцами), к которым с двух сторон прилегает соответственно по шесть электродов привода крутильных колебаний, расположенных на статорах. Каждый статор (фиг. 3) выполнен в виде диэлектрической пластины, периферийная часть которой является частью корпуса гироскопа. На стороне пластины, прилегающей к ротору, из пленки электропроводящего покрытия образованы четыре электрода э3-э6 емкостных датчиков выходных угловых смещений ротора, а также - шесть электродов привода крутильных колебаний, объединенных в две группы с выводами э7 и э8. Для увеличения диапазона угловых колебаний может быть применена система из четырех зубцов и электродов с выводами c1-с4, показанная на фиг. 5.
Активный элемент «ротор - пружина - опора» с целью усреднения погрешностей изготовления и достижения максимального равенства мод угловых колебаний ротора по трем ортогональным осям составлен (фиг. 4) из двух прилегающих друг к другу частей, одна из которых имеет пружину с вращением витков спиралей в сторону, противоположную вращению спиралей другой части. Касание спиралей исключается либо применением проставок между двумя частями в зонах, не занятых спиралями, либо - удалением материала пластины в зоне расположения спирали. При этом две сопрягаемые части имеют электропроводящее покрытие только на внешних поверхностях.
Предложенный гироскоп установлен на печатной плате с электронными компонентами, обеспечивающими работу привода крутильных колебаний (схема фиг. 6) и стабилизацию выходных угловых смещений ротора (схема фиг. 7), определяющих составляющие угловой скорости, действующей на прибор.
Схема привода (фиг. 6) содержит инвертированные источники 10 и 11 высокочастотных напряжений, разнополярные источники 12 и 13 опорных постоянных напряжений, регулятор 14 величины опорных напряжений, источник 15 напряжения с частотой колебаний ротора, усилитель 16 с регулируемым коэффициентом усиления, высокочастотный демодулятор 17, низкочастотный демодулятор 18, схему сравнения 19 и задатчик - регулятор 20 амплитуды колебаний ротора. Группы симметричных относительно плоскости ротора электродов привода э7 и э8 принадлежат статорам 5 и 6 (обозначения в скобках).
Схема стабилизации выходных угловых смещений ротора (фиг. 7) содержит источник 21 постоянного регулируемого опорного напряжения, источник 22 высокочастотного напряжения, дифференциальные датчики 23 и 24 токов емкостных датчиков угловых смещений ротора с выводами э3-э6 статора 5, высокочастотные демодуляторы 25 и 26 и усилители-инверторы 27 и 28, подключенные к электродам э3-э6 статора 6.
При вращении корпуса гироскопа с колеблющимся ротором составляющие угловой скорости этого вращения по ортогональным осям расположения емкостных датчиков угловых смещений ротора вызывают вторичные колебания (из-за сил Кориолиса), являющиеся мерой этих составляющих. Для повышения эффективности измерения применяют схемы стабилизации (компенсации) этих вторичных колебаний с помощью датчиков момента. Предлагаемая схема такой стабилизации (фиг. 7) использует в качестве датчиков момента электроды емкостных датчиков статора 6. Это пример простого разделения функций измерения угла и создания вращающего момента. Возможны другие построения: с совмещением этих функций (патент РФ №2209393) или разделение функций по времени при переключении режима работы датчика угла на режим датчика момента (патент РФ №2485444).
Эффективность работы вибрационных гироскопов определяется также равенством мод угловых колебаний ротора по его трем осям симметрии. Для дискового ротора с малой толщиной (когда момент инерции по оси колебаний примерно равен удвоенному моменту инерции по оси вторичного колебания) применение предложенной спиральной пружины с ограниченным разворотом витков на угол, примерно равный α=π(1±0,2), (как подтверждает компьютерный модальный анализ) теоретически позволяет выполнить это условие в некотором диапазоне изменений шага и толщины витков пружины, а также соотношения моментов инерции ротора из-за выполнения в нем центрального отверстия. Если на практике ввиду погрешности изготовления получается расхождение по указанным модам, то применяется коррекция жесткостей подвеса ротора электронным способом - с помощью регулятора величины опорных напряжений 14 (фиг. 5) и при изменении величины опорного напряжения источника 21 (фиг. 7) для работы датчиков момента.
Работа привода крутильных колебаний предложенного гироскопа основана на периодическом втягивании диэлектрических зубцов ротора (фиг. 6) с частотой источника 15 между соответствующими электродами э7 и э8 статоров 5 и 6. Постоянство амплитуды колебаний обеспечивается автоматическим регулятором по схеме «задатчик 20 - схема сравнения 19 - усилитель 16 с регулируемым коэффициентом усиления». В отличие от прототипа такой привод работоспособен при высоких значениях напряженности электрического поля между электродами, разделенными диэлектриком, т.е. не обязательно требует вакуумирования.
В предложенном гироскопе корпус (пригодный даже для создания высокого вакуума) естественно образован внешними частями статоров, проставок и пластины с пружиной и ротором. Благодаря использованию кварцевого стекла в качестве основного материала ротора, специальной пружины и статоров гироскоп отличается повышенной точностью и стабильностью в широком диапазоне изменения температуры окружающей среды.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 2015 |
|
RU2579156C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ГИРОСКОП | 2015 |
|
RU2589939C1 |
| УНИВЕРСАЛЬНЫЙ НЕКОНТАКТНЫЙ ГИРОСКОП | 2013 |
|
RU2521765C1 |
| УСТРОЙСТВО ПОДВЕСА ФЕРРОМАГНИТНОГО СФЕРИЧЕСКОГО РОТОРА | 1996 |
|
RU2156441C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ВЕКТОРА КИНЕТИЧЕСКОГО МОМЕНТА НЕКОНТАКТНОГО ГИРОСКОПА | 1993 |
|
RU2065134C1 |
| БЕСПОДШИПНИКОВАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2014 |
|
RU2562448C1 |
| НЕКОНТАКТНЫЙ ПОДВЕС РОТОРА | 2013 |
|
RU2545310C2 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2010 |
|
RU2485444C2 |
| СПОСОБ СБОРКИ ГИРОСКОПОВ И ВИБРАЦИОННЫЙ ГИРОСКОП | 2007 |
|
RU2334946C1 |
| БЕСПОДШИПНИКОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2017 |
|
RU2652792C1 |


Изобретение относится к области навигационной техники, а именно к конструкции микромеханических вибрационных гироскопов. Вибрационный гироскоп содержит дисковый ротор в упругом подвесе в виде пружины, связывающей ротор с неподвижной опорой, и статоры с электродами привода крутильных колебаний ротора и емкостных датчиков для определения его угловых смещений относительно двух взаимно перпендикулярных осей, ортогональных к оси крутильных колебаний ротора. Ротор, пружина и неподвижная опора выполнены из одной пластины диэлектрического материала с электропроводящим покрытием, при этом пружина соединяет внешнюю часть ротора с неподвижной опорой и выполнена в виде четырехзаходной спирали с ограниченным разворотом витков на угол, примерно равный α=π(1±0,2). В центральной части ротора, свободной от электропроводящего покрытия, выполнено отверстие с 2n (n=2, 3, 4…) зубцами для взаимодействия соответственно с 2n электродами привода крутильных колебаний. Технический результат - повышение точности и упрощение изготовления вибрационного гироскопа. 1 з.п. ф-лы, 7 ил.
1. Вибрационный гироскоп, содержащий дисковый ротор в упругом подвесе в виде спиральной пружины, связывающей ротор с неподвижной опорой, и статоры, прилегающие с зазором к ротору, с электродами привода крутильных колебаний ротора и емкостных датчиков для определения его угловых смещений относительно двух взаимно перпендикулярных осей, ортогональных к оси крутильных колебаний, отличающийся тем, что ротор, пружина и неподвижная опора выполнены из одной пластины диэлектрического материала, например кварцевого стекла, с электропроводящим покрытием, при этом пружина, соединяющая внешнюю часть ротора с неподвижной опорой, выполнена в виде четырехзаходной спирали с ограниченным разворотом витков на угол, примерно равный α=π(1±0,2), а в центральной части ротора, свободной от электропроводящего покрытия, выполнено отверстие с 2n (n=2, 3, 4…) зубцами для взаимодействия соответственно с 2n электродами привода крутильных колебаний.
2. Вибрационный гироскоп по п. 1, отличающийся тем, что ротор, пружина и неподвижная опора составлены из двух прилегающих друг к другу частей, одна из которых имеет пружину с вращением витков спиралей в сторону, противоположную вращению спиралей другой части.
| US 5511419 A, 30.04.1996 | |||
| US 5881598 A1, 16.03.1999 | |||
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2001 |
|
RU2216712C2 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2002 |
|
RU2217699C2 |

