Заявляемый способ относится к области прицеливания ракет-носителей (РН) перед пуском. От точности прицеливания напрямую зависит точность выведения космического аппарата (КА) на заданную орбиту.
Известно несколько способов прицеливания, классифицируемых по различным признакам, выбранных в качестве прототипа (см. Автоматизированные системы управления подготовкой и пуском ракет космического назначения: В.И. Полянский и др., С-Пб.: ВИККА, 1997. - С. 290-299). Эти способы имеют ряд недостатков, среди которых можно отметить следующие:
- способы не учитывают погрешности в азимуте пуска, связанные с несоответствием моментов времени между запуском двигателей и отрывом РН от пускового стола;
- дороговизна оборудования систем прицеливания;
- низкая помехозащищенность в зависимости от состояния атмосферы.
Предлагаемый ниже способ прицеливания РН в полете обеспечивает необходимую точность выведения КА по азимуту через определение азимута плоскости полета РН на участке 1-й ступени.
Этот участок выбран ввиду необходимости установки на борт РН дополнительной аппаратуры, а это предпочтительнее делать на 1-й ступени, также при реализации способа желательно управление полетом РН осуществлять по жесткой траектории, что в перспективных РН, по-видимому, сохранится только на участке 1-й ступени. Последнее обстоятельство объясняется особой экономической выгодностью использования малых зон отчуждения для падения 1-х ступеней.
Сущность предлагаемого способа заключается в следующем:
1. После грубого прицеливания наведением корпуса РН с погрешностями 0,5-1o (для падения 1-й ступени в выбранную зону отчуждения) и окончания вертикального участка полета 1-й ступени РН определяют координаты наклонного участка полета 1-й ступени РН, причем в течение наклонного участка полета сеансы определения координат проводят неоднократно от начала и до конца наклонного участка.
2. По координатам положения РН после их статистической обработки определяют генеральную линию траектории участка и азимут ее плоскости.
3. Полученный азимут используют для определения положения гиростабилизатора по азимуту и дальнейшего корректирования (при необходимости) полета РН на участке 1-й ступени и управления полетом остальных ступеней.
Необходимая точность определения координат РН может быть получена исходя из достаточной точности определения азимута плоскости участка 1-й ступени и горизонтальной дальности наклонного участка полета 1-й ступени. Существующие системы прицеливания вместе с системами приведения гиростабилизаторов и с учетом погрешностей в положении гиростабилизаторов, вызванных разрывом между запуском двигателя 1-й ступени и отрывом РН от пусковой системы, дают погрешность в 30 и более угловых секунд. Погрешность в определении координат определяется по формуле:
ΔL = L•sin(ΔAз),
где ΔL - погрешность в определении координат;
L - горизонтальная дальность участка 1-й ступени;
ΔАз - погрешность в задании азимута пуска наземными системами прицеливания.
При L= 100 км и ΔАз≈30' и учитывая малость ΔАз, получим Δ = ΔAз•L (где ΔАз задана в радианах) или Δ<15 м.
Такие точности определения координат РН на участке 1-й ступени могут быть получены при использовании спутниковой навигационной системы, абонентом-потребителем которой является аппаратура, установленная на 1-й ступени РН и аналогичная аппаратуре, устанавливаемой на других летательных аппаратах (самолетах, вертолетах). Такой системой является широко известная система NAVSTAR. Согласно описаниям данная система обеспечивает точность определения координат абонента в грубом режиме (SPS) с предельной ошибкой измерения в горизонтальной плоскости до 100 м. В прецизионном режиме (PPS), предназначенном для военных потребителей, ошибка измерения снижается до 22 м, а при двухчастотном режиме (с 2-я приемниками) до 17 м. Испытания различных типов аппаратуры потребителей показали реальность снижения погрешностей измерения до 5-10 м. Длительность одного сеанса наблюдений от долей секунды до нескольких секунд.
Таким образом, для пессимистического (SPS) и оптимистического варианта (PPS) ошибок измерений можно получить следующие ошибки определения азимутов плоскостей пуска (см. табл. 1).
При базе измерений (длине горизонтальной дальности участка 1-й ступени) в 200, 300, 400 и т.д. км величины ошибок уменьшаются соответственно в 2, 3, 4 и т.д. раз.
Предварительные оценки возможных ошибок определения азимута пуска по измерениям траектории участка 1-й ступени РН с использованием спутниковой навигационной системы (например, NAVSTAR) показывают реальность достижения точностей прицеливания не хуже получаемых с помощью современных систем прицеливания РН.
Фиг.1 поясняет предлагаемый метод. На нем обозначено:
х - сеансы связи со спутниковой навигационной системой;
оj - проекции положения РН на поверхность Земли при сеансах связи;
- - - - генеральная линия-проекция траектории участка полета 1-й ступени;
-- - -- - средняя генеральная линия;
{ - зона окончания участка полета 1-й ступени по азимуту при грубом прицеливании; - граница проекций окончаний участка полета 1-й ступени на поверхность Земли в зависимости от азимута пуска;
- граница проекций окончаний участка полета 1-й ступени на поверхность Земли в зависимости от азимута пуска;
Δi - точки на проекции окончаний с известными азимутами (i=1, 2,..., NΔ);
Ап - заданный азимут для прицеливания на стартовой позиции с предельной погрешностью;
Ап j - реальный азимут пуска; - азимут i-й точки на проекции окончаний участка полета 1-й ступени.
- азимут i-й точки на проекции окончаний участка полета 1-й ступени.
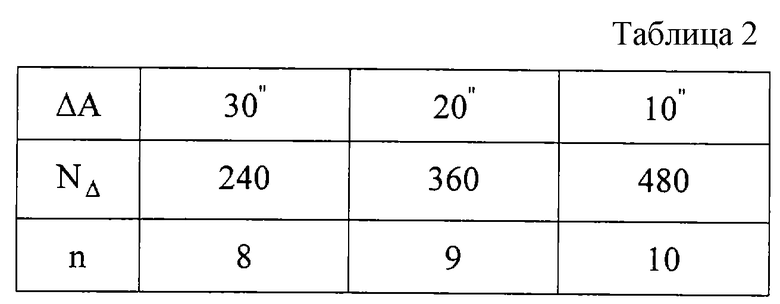
Количество точек (NΔ) с известными азимутами на проекции возможных окончаний участков 1-й ступени (для погрешности стартового прицеливания ±1o) определяется табл. 2, где ΔА - промежуток квантования азимута, n - необходимое количество разрядов для записи азимута точки ΔА в пределах двух градусов.
На фиг.2 показан процесс определения реального азимута пуска в виде блок-схемы, где ΔGi - модуль расстояния между точкой Δi и ближайшей к ней точкой генеральной линии.


Изобретение относится к космонавтике, в частности к выведению ракет-носителей на заданную орбиту. Сущность изобретения заключается в том, что после грубого прицеливания ракеты-носителя на старте и окончания ее вертикального участка полета определяют координаты наклонного участка, генеральную линию и азимут плоскости траектории полета, после чего с помощью указанного азимута плоскости определяют положение гиростабилизатора и корректируют дальнейший полет ракеты-носителя. 2 ил., 2 табл.
Способ прицеливания ракеты-носителя (РН), основанный на доприцеливании ее после старта, отличающийся тем, что после грубого прицеливания РН на старте и окончания ее вертикального участка полета определяют координаты наклонного участка, генеральную линию и азимут плоскости траектории, после чего с помощью азимута плоскости определяют положение гиростабилизатора и корректируют дальнейший полет РН.
| СПОСОБ ПРЕДСТАРТОВОЙ ВЫСТАВКИ ВЫСОКОТОЧНЫХ РАКЕТ | 1995 |
|
RU2150124C1 |
| US 4306691, 22.12.1981 | |||
| ПРИВОДНАЯ КОЛОНКА ДЛЯ РЕГУЛИРУЮЩЕГО КЛАПАНА ПАРОВОЙ ТУРБИНЫ | 2002 |
|
RU2237168C1 |
| СТОПОР ДЛЯ ОТСЕЧКИ ШЛАКА В КОНВЕРТЕРЕ | 1998 |
|
RU2148656C1 |
| DE 3812783 A1, 26.10.1989. | |||

