Изобретение относится к области радиолокации и может быть использовано для обнаружения флюктуирующих эхо-сигналов от воздушных объектов (ВО) с характеристиками, которые обеспечиваются использованием критерия отношения правдоподобия с учетом различия величин отношения сигнал/ шум в каждой составляющей пачечный сигнал.
Известен способ использования обнаружителей радиолокационных сигналов /см. "Теоретические основы радиолокации", под редакцией Я.Д.Ширмана, М., "Сов. радио", 1970 г., стр.157/, заключающийся в том, что после детектирования аналоговые эхо-сигналы поступают для последующей обработки, в которой накапливают эхо-сигналы радиолокационной пачки от каждого ВО и формируют результирующее значение, которое затем сравнивают с некоторой величиной назначаемого порога, при превышении которого констатируют обнаружение ВО.
Известно устройство осуществления указанного выше способа /см. "Справочник по радиолокации", М.Сколник, М., "Сов. радио", 1976 г., том 1, стр.194 и 195/, содержащее последовательно соединенные высокочастотную часть приемника РЛС, детектор, аналого-цифровой преобразователь (АЦП), входное запоминающее устройство (ЗУ), блок выдачи и выход устройства с индикатором на выходе, а также регистр порога, связанный с компаратором, выход превышения порога которого связан со входом разрешения выдачи блока выдачи.
Другим близким по технической сущности к заявленному способу является способ /см. "Справочник по радиолокации", М.Сколник, М., "Сов. радио", 1976 г., том 1, стр.183-194/, заключающийся в том, что после детектирования аналоговые эхо-сигналы преобразуют в цифровую форму с помощью АЦП и регистрируют во входном ЗУ для последующей первичной обработки, в т.ч. обнаружения ВО посредством получения величины результирующего сигнала путем накопления эхо-сигналов радиолокационной пачки от каждого ВО и последующего сравнения результирующего сигнала с величиной порога, которую назначают в зависимости от конкретной шумовой и помеховой ситуации в процессе работы, причем при превышении порога констатируют обнаружение ВО и отображают его на индикаторах индивидуального и коллективного пользования.
Известно также устройство, близкое по технической сущности к заявленному устройству /см. "Справочник по радиолокации", М.Сколник, М. "Сов. радио", 1976 г., том 1, стр.191/, содержащее последовательно соединенные высокочастотную часть приемника РЛС, детектор, АЦП, входное ЗУ со счетчиками адреса записи и чтения, блок выдачи и выход устройства с индикатором на выходе, а также блок формирования азимута, вход которого связан с антенным сельсином, а выход которого связан со вторым входом блока выдачи, и, кроме того, пульт оператора и регистр порога, вход которого связан с первым выходом пульта оператора и выход которого связан с первым входом компаратора, выход превышения порога которого связан со входом блока разрешения выдачи информации.
Недостатком известных способов и устройств является то, что они в основных случаях, когда смесь сигнал+шум характеризуется, например, распределением Райса, не обеспечивают строгую реализацию обнаружения по критерию отношения правдоподобия, т.к. накопление эхо-сигналов осуществляется простейшим суммированием, что обусловлено недостаточным быстродействием ЭВМ, используемых в период разработки этих схем и устройств.
Наиболее близким по технической сущности к заявленному способу является способ /см. патент № 2210790 РФ МПК 7 G 01 S 13/56 за 2003 г., Бюл. № 23/, заключающийся в том, что в обнаружителях после детектирования аналоговые эхо-сигналы преобразуют в цифровую форму с помощью АЦП и регистрируют во входном запоминающем устройстве для последующей первичной обработки и обнаружения ВО посредством получения величины результирующего сигнала путем накопления эхо-сигналов радиолокационной пачки от каждого ВО и последующего сравнения результирующего сигнала с величиной порога, которую назначают в зависимости от конкретной шумовой и помеховой ситуации в процессе работы, причем если величина результирующего сигнала превышает величину порога, то принимается решение об обнаружении ВО, который отображается на индикаторах индивидуального и коллективного пользования, при этом априорно до начала обработки этой информации регистрируют с помощью устройства ввода в перепрограммируемое постоянное ЗУ (ППЗУ) соответствия известную функцию отношения правдоподобия для единичного эхо-сигнала в виде таблицы соответствия эхо-сигнала и значения самой функции, а затем в процессе обработки информации для каждого единичного эхо-сигнала, выбираемого из входного ЗУ, определяют значения функций отношения правдоподобия, которые регистрируют в ЗУ значений отношения правдоподобия и получают таким образом все значения функции отношения правдоподобия для каждой радиолокационной пачки, далее с помощью вычислителя для этих значений функции отношения правдоподобия определяют их произведение, а потом среднее геометрическое значение функции отношения правдоподобия, которое затем используют в качестве адреса обращения к ППЗУ соответствия и считывают из этого ППЗУ величину, эквивалентную радиолокационной пачке эхо-сигналов в качестве первого операнда в вычислитель, в качестве второго операнда, в который аналогично считывают из того же ППЗУ величину эхо-сигналов, когда в качестве адреса обращения к ППЗУ соответствия используют максимальное значение функции отношения правдоподобия, если оно реализуется не при нулевом значении аргумента, далее в вычислителе для указанных двух операндов определяют абсолютную разницу, которую затем используют в качестве величины результирующего сигнала радиолокационной пачки для сравнения с величиной порога, причем при превышении порога принимают решение об обнаружении ВО.
Наиболее близким по технической сущности к заявленному устройству является устройство /см. патент № 2210790 РФ МПК 7 G 01 S 13/56 за 2003 г, Бюл. № 23/, содержащее высокочастотную часть приемника РЛС с антенной, детектор, АЦП, входное ЗУ со счетчиками адреса записи и чтения, блок выдачи информации об обнаруживаемых ВО и выход устройства, которые соединены последовательно друг с другом в указанном порядке от антенного входа до выхода всего устройства, причем кроме указанных элементов устройство содержит антенный сельсин, связанный с блоком формирования азимута, который в свою очередь связан с блоком выдачи информации, индикатор, вычислитель, ЗУ значений функции отношения правдоподобия, первый и второй счетчики адреса, компаратор, блок управления работой всего устройства и пульт оператора, с которого вводится информация в регистр порога, а таблица соответствия значений функции отношения правдоподобия и ее аргумента вводится в перепрограммируемое постоянное ЗУ через устройство ввода. С помощью вычислителя и компаратора рассчитывают величину результирующего сигнала, при превышении порогового значения которой констатируют обнаружение ВО. В результате обеспечивается обнаружение ВО с характеристиками, соответствующими характеристикам обнаружения по критерию отношения правдоподобия для пачечного эхо-сигнала с прямоугольной формой огибающей.
Недостатком этого способа и устройства его осуществления является то, что когда огибающая пачечного эхо-сигнала характеризуется произвольной, но известной формой, не обеспечиваются характеристики обнаружения, реализуемые применением критерия отношения правдоподобия из-за того, что способ и устройство рассчитаны на обнаружение пачечного эхо-сигнала с прямоугольной формой огибающей.
Целью заявленного изобретения является обеспечение обнаружения по критерию отношения правдоподобия пачечных радиолокационных сигналов в случае, когда их огибающая отличается по форме от прямоугольной, путем использования, с одной стороны, вычислителя с достаточным быстродействием, а с другой - путем априорной регистрации до начала обработки сигналов информации об огибающей пачечного эхо-сигнала, а также обеспечение обнаружения медленно флюктуирующих пачечных эхо-сигналов с потерями, определяемыми лишь неизвестностью точных значений отношений сигнал/шум для составляющих таких пачечных сигналов.
Поставленная цель достигается тем, что способ обнаружения по критерию отношения правдоподобия пачечных сигналов с огибающей известной формы, заключающийся в том, что в обнаружителях после линейного детектирования аналоговые эхо-сигналы преобразуют в цифровую форму с помощью АЦП и регистрируют во входном ЗУ для последующей первичной обработки и обнаружения ВО посредством получения величины функции отношения правдоподобия для всего радиолокационного пачечного сигнала от каждого ВО, когда экстремум функции отношения правдоподобия для каждой составляющей пачечного сигнала реализуется при аргументе, равном нулю, например в случае, когда смесь сигнал+шум определяется распределением Райса, с последующим сравнением полученной величины с величиной порога, которую назначают в зависимости от конкретной шумовой и помеховой ситуации в процессе работы, причем если указанная величина функции отношения правдоподобия для всего пачечного сигнала не превышает величину порога, то принимается решение, что анализируемая пачка сигналов является ложной, а если превышает - принимается решение об обнаружении ВО, который отображается на индикаторах индивидуального и коллективного пользования, при этом априорно до начала обработки этой информации регистрируют с помощью регистра ввода в вычислитель известные величины отношения сигнал/шум по напряжению для каждого единичного сигнала радиолокационной пачки, а затем в процессе обработки информации для каждого единичного сигнала, выбираемого из входного ЗУ, с помощью вычислителя рассчитываются значения функций отношения правдоподобия и их произведение для каждой радиолокационной пачки сигналов, которое сравнивается с величиной порога.
Поставленная цель достигается тем, что устройство обнаружения по критерию отношения правдоподобия пачечного сигнала с огибающей известной формы, содержащее последовательно соединенные выход высокочастотной части приемника РЛС, линейный детектор, аналого-цифровой преобразователь (АЦП), входное запоминающее устройство (ЗУ) со счетчиками адреса записи и чтения, блок выдачи информации и выход устройства с индикатором на выходе, а также блок формирования азимута, вход которого связан с антенным сельсином, а выход которого связан со вторым входом блока выдачи информации, и, кроме того, пульт оператора, первый выход которого связан со входом регистра порога, выход которого связан с первым входом компаратора, выход превышения порога которого связан со входом блока разрешения выдачи информации, также содержит регистр коэффициентов веса, вход которого связан со вторым выходом пульта оператора, а выход регистра коэффициентов веса связан с первым входом вычислителя, а второй его вход связан с выходом входного ЗУ, выход вычислителя связан со вторым входом компаратора, при этом выходы блока управления связаны со входами вычислителя, АЦП, регистра коэффициентов веса, регистра порога, входного ЗУ, счетчиками записи и чтения, блока выдачи информации, компаратора и индикатора.
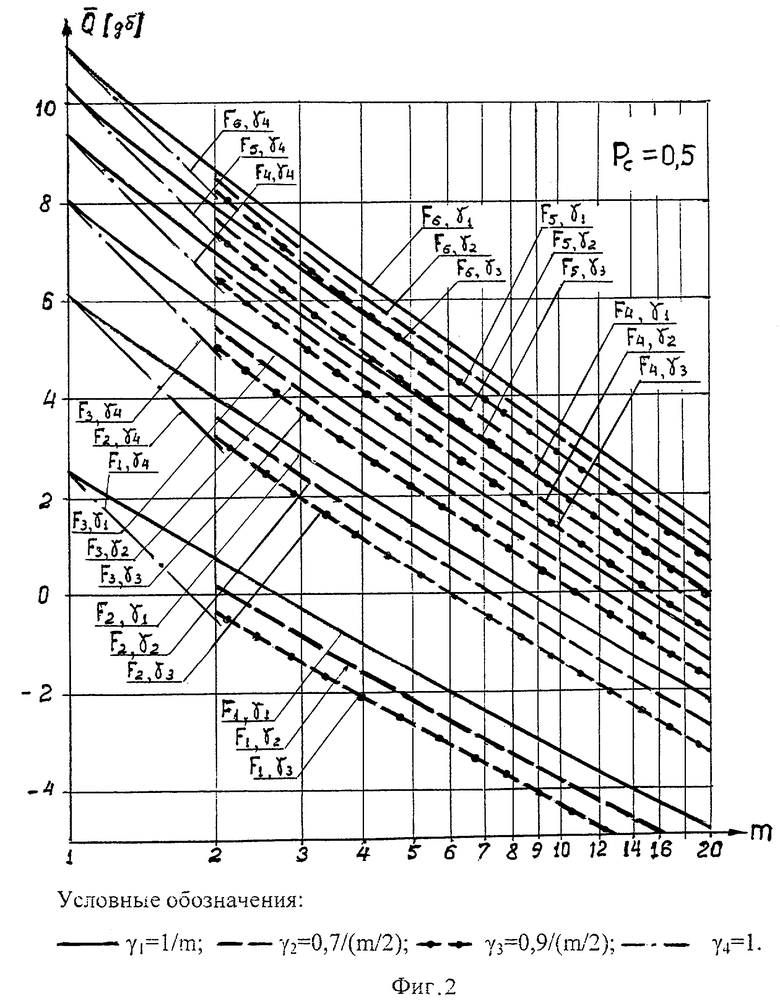
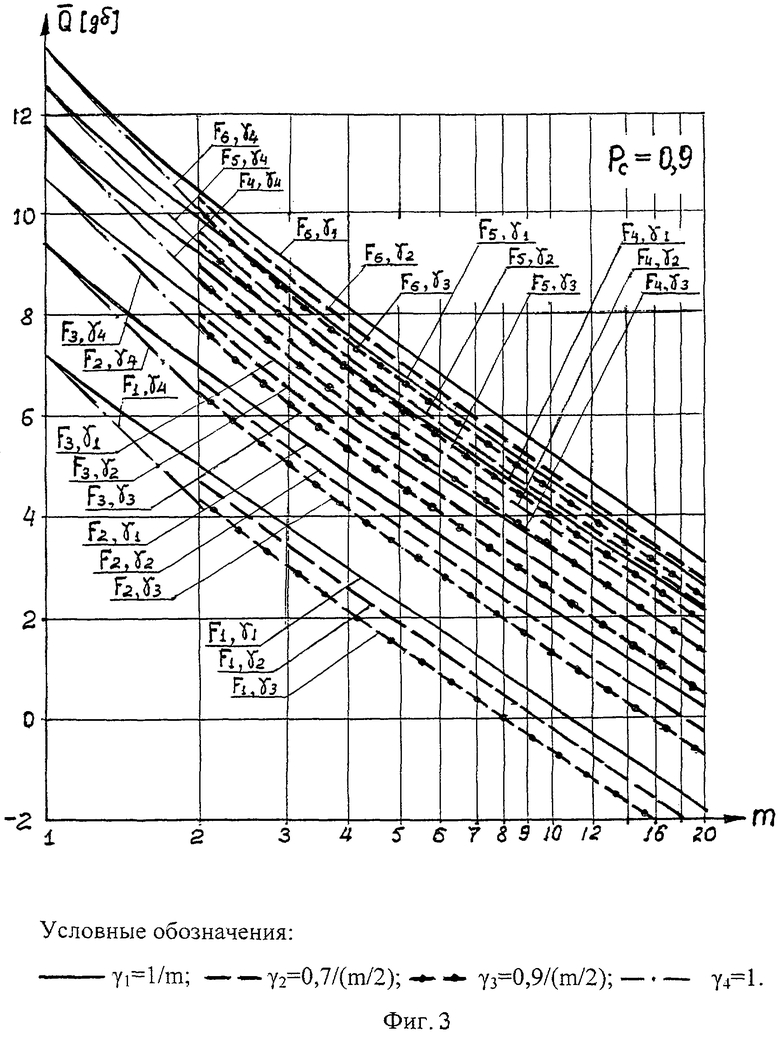
На чертежах изображены: на фиг.1 - блок-схема устройства, реализующего способ обнаружения по критерию отношения правдоподобия пачечного сигнала с огибающей известной формы, на фиг.2 - зависимость от m потребной величины  для обеспечения обнаружения пачечного эхо-сигнала с вероятностью Рс=0,5 при вероятности ложных тревог F=10-1; 10-2;...;10-6 и разных значениях коэффициента γ, на фиг.3 - та же зависимость для Рс=0,9. Определение коэффициента γ приводится далее.
для обеспечения обнаружения пачечного эхо-сигнала с вероятностью Рс=0,5 при вероятности ложных тревог F=10-1; 10-2;...;10-6 и разных значениях коэффициента γ, на фиг.3 - та же зависимость для Рс=0,9. Определение коэффициента γ приводится далее.
Устройство содержит высокочастотную часть 1 приемника РЛС с антенным устройством 1.1, линейный детектор 2, АЦП 3, входное ЗУ 4 со счетчиками 5 и 6 адреса записи и чтения соответственно, антенный сельсин 7, связанный с антенным устройством, блок 8 формирования азимута, блок 9 выдачи, индикатор 10, пульт 11 оператора, регистр 12 порога, компаратор 13, регистр 14 коэффициентов веса, вычислитель 15, блок 16 управления и выход 17 устройства.
При этом элементы 1, 2, 3, 4, 9 и 17 соединены последовательно друг с другом в указанном порядке от антенного входа 1.1 до выхода 17 устройства. Первый выход пульта 11 оператора связан со входом регистра 12 порога, выход которого связан с первым входом компаратора 13, выход превышения порога которого связан со входом разрешения блока 9 выдачи информации, второй выход пульта 11 оператора связан со входом регистра 14 коэффициентов веса, выход которого связан с первым входом вычислителя 15, второй его вход связан с выходом входного ЗУ 4, а выход вычислителя 15 связан со вторым входом компаратора 13, выходы счетчиков записи 5 и чтения 6 соединены соответственно со вторым и третьим входами входного ЗУ 4, антенный сельсин 7 механически связан с антенным устройством 1.1, а выход блока 8 формирования азимута связан со вторым входом блока 9 выдачи. Выходы блока 16 управления соединены с соответствующими входами вычислителя 15, АЦП 3, ЗУ 4, регистров 12 и 14, блока 9 выдачи, счетчиков 5 и 6, компаратора 13 и индикатором 10. Пунктиром показана механическая связь антенного сельсина 7 с антенным устройством 1.1.
Техническим результатом изобретения является обеспечение обнаружения с характеристиками, обеспечиваемыми использованием критерия отношения правдоподобия для пачечных радиолокационных сигналов с произвольной, но известной формой огибающей. Эти характеристики рассчитаны с помощью ЭВМ для различных коэффициентов, определяющих раздробленность энергии пачечного сигнала по его составляющим. Другим результатом является то, что по сравнению со случаем использования оптимизированного бинарного обнаружителя /см. "Справочник по радиолокации", М.Сколник, М., "Сов. радио", 1976 г., том 1, стр.191, 193/, например, при вероятности ложных тревог 10-4, вероятности обнаружения ВО, равной 0,5, и числе импульсов, составляющих пачечный сигнал 5÷20, обеспечивается выигрыш, который составляет 1÷1,3 дб, а при вероятности обнаружения 0,9 - 1,6÷1,9 дб. В случае медленно флюктуирующих эхо-сигналов реализуется обеспечение обнаружения пачечных эхо-сигналов с потерями, определяемыми лишь неизвестностью точных значений отношений сигнал/шум для каждой составляющей таких пачечных эхо-сигналов. Эти потери определяются относительно малыми величинами, которыми, как показано далее, можно пренебречь.
Более подробно сущность данного изобретения состоит в следующем.
Вначале рассмотрим случай, когда импульсы пачечного эхо-сигнала характеризуются известными отношениями сигнал/шум.
Отношение правдоподобия независимых образцов выборки записывается в виде
λ=f1(x1,Q1)f1(x2,Q2)...f1(xm,Qm)/f0(x1)f0(x2)...f0(xm).
где f1(x,Q) и f0(x) - плотности вероятности случайной величины Х соответственно для смеси полезных и мешающих сигналов и одних мешающих сигналов-шумов; х - образец выборки, информация которого поступает на вход обнаружителя; 1, 2,...,m - порядковый номер (i) образца выборки; Q=[E1(x2)/E0(x2)]-1; E1(x2),E0(x2) - вторые моменты величины Х для смеси сигнала с шумом и для одного шума соответственно.
В случае использования обнаружителя по критерию отношения правдоподобия вероятность обнаружения пачечного сигнала
Pc=1-Fc(Zm)|Zm=Zпор, где

Zm - область интегрирования в m-мерном пространстве, граница которой определяется множеством тех значений x1, x2,..., xm, при которых λ=С; С-константа, которая меняется при изменении величины Zm; Zпор - пороговое значение Zm; вертикальная черта с равенством у этой черты означает условие, при котором справедливо само выражение.
Величина порога выбирается из условия выполнения задаваемой вероятности ложной тревоги (F). Величина F=1-Fп(Zm)|Zm=Zпор, где

a Zm - та же область интегрирования, что и в (1).
Отметим, что функции f1(x,Q) и f0(x) обладают следующими свойствами: f1(x,Q)≥0; f0(x)≥0; 
 а отношение f1(x,Q)/f0(x)=f(x,Q) в области возможных значений Х характеризуется только одним экстремумом.
а отношение f1(x,Q)/f0(x)=f(x,Q) в области возможных значений Х характеризуется только одним экстремумом.
Способ обнаружения пачечного сигнала по критерию отношения правдоподобия упрощается, если он определяется функцией, которая зависит от одной переменной (х*) и которая имеет то же значение при х*, что и λ при x1, x2,...,xm. Такое условие выполняется, если
λ=f(x1,Q1)f(x2,Q2)...f(xm,Qm)=f(0,Q1)f(0,Q2)...f(0,Qm-1)f(x*,Qm),
где в качестве Qm может быть выбрана любая из величин Qi. Из этого равенства следует, что

Равенство (3) характеризует границу области Zm в m-мерном пространстве.
Из (3) определяется величина х*, которая сравнивается с порогом Vпор. Если х*≥Vпор., то сигнал считается обнаруженным, а если х*<Vпор - то нет. Реализация указанной процедуры является способом обнаружения пачечного сигнала по критерию отношения правдоподобия при известных величинах Qi.
В наиболее часто встречающемся случае, когда смесь сигнал+шум характеризуется распределением Раиса, функция
 а
а 
0≤хi≤∞, где  - модифицированная функция Бесселя первого рода нулевого порядка. Тогда (3) имеет вид
- модифицированная функция Бесселя первого рода нулевого порядка. Тогда (3) имеет вид

так как  При этом функция f(x,Q) характеризуется одним экстремумом в точке х=0.
При этом функция f(x,Q) характеризуется одним экстремумом в точке х=0.
В рассматриваемом случае, как и при использовании (3), величина х* сравнивается с порогом. Реализация такой процедуры при современном развитии уровня вычислительной техники не вызывает затруднений. Но и эту процедуру можно упростить, если учесть, что зависимость величины х* и величины произведения функций  характеризуется нелинейной пропорциональной зависимостью. Тогда не величину х*, а это произведение целесообразно сравнивать с его пороговым значением. Заметим, что на практике вместо расчета величин можно, аналогично тому, как и в /3/, использовать таблицу значений
характеризуется нелинейной пропорциональной зависимостью. Тогда не величину х*, а это произведение целесообразно сравнивать с его пороговым значением. Заметим, что на практике вместо расчета величин можно, аналогично тому, как и в /3/, использовать таблицу значений 
Способ обнаружения пачечного сигнала по критерию отношения правдоподобия может быть получен, как и в /3/, другим образом.
Пусть для рассматриваемых функций f(xi,Qi) величины  Тогда
Тогда  Выбираем другую функцию
Выбираем другую функцию  где
где 
Функции λ и  имеют одинаковые значения при любых сочетаниях хi, если
имеют одинаковые значения при любых сочетаниях хi, если
 а
а 
Определяя из (5) величину  получаем
получаем 
Величины х* и  характеризуют различные точки границы одной и той же области Zm. Поэтому применение (4) и (5) дает одинаковые конечные результаты.
характеризуют различные точки границы одной и той же области Zm. Поэтому применение (4) и (5) дает одинаковые конечные результаты.
Упрощенный способ обнаружения пачечного сигнала при Q1=Q2=...=Qm определяется /1/ как  Когда величины Qi разные, то
Когда величины Qi разные, то
 где
где  - весовые коэффициенты.
- весовые коэффициенты.
Граница области Zm для любой пары импульсов пачечного сигнала при использовании упрощенного способа обнаружения (6) является прямой линией, угол наклона которой к координатным осям Xi и Xi+1 определяется отношением этой пары. В случае использования (4) или (5) граница области Zm для тех же условий отличается по форме от прямой линии, чем обусловлены некоторые энергетические потери  при использовании (6).
при использовании (6).
Различие величин Qi в пачечном сигнале будем оценивать коэффициентом  В случае, когда все Qi равны, величина γ=1/m, а в случае, когда вся энергия пачечного сигнала сосредоточена в одном импульсе, величина γ=1. В других случаях 1/m<γ<1. Заметим, что формальное увеличение числа импульсов в пачечном сигнале, когда Q1≠0, Q2=Q3=...Qm=0, не изменяет значений функций Fc(Zm) и Fп(Zm) при использовании обнаружения по критерию отношения правдоподобия. Следовательно, величины вероятностей Рс и F остаются такими же, как при m=1 для Q1, a величина
В случае, когда все Qi равны, величина γ=1/m, а в случае, когда вся энергия пачечного сигнала сосредоточена в одном импульсе, величина γ=1. В других случаях 1/m<γ<1. Заметим, что формальное увеличение числа импульсов в пачечном сигнале, когда Q1≠0, Q2=Q3=...Qm=0, не изменяет значений функций Fc(Zm) и Fп(Zm) при использовании обнаружения по критерию отношения правдоподобия. Следовательно, величины вероятностей Рс и F остаются такими же, как при m=1 для Q1, a величина  уменьшается в m раз.
уменьшается в m раз.
Была разработана цифровая модель расчета по (5) характеристик обнаружения пачечного сигнала. С помощью ЭВМ по этой модели получены результаты, которые в виде графиков приведены на фиг.2 и 3. На этих чертежах следующие условные обозначения: F1=10-1; F2=10-2; F3=10-3; F4=10-4; F5=10-5; F6=10-6; γ1=1/m; γ2=0,7/(m/2); γ3=0,9/(m/2); γ4=1.
В соответствии с полученными характеристиками обнаружение пачечного сигнала, характеризуемого, например, коэффициентом γ=0,8(2/m), где m≥4, обеспечивается с меньшими значениями  чем в случае обнаружения пачечного сигнала, характеризуемого коэффициентом γ=1/m. Уменьшение составляет ≈0,7 дб при Рс=0,5 и F=10-1÷10-6, а при Рс=0,9 оно - ≈0,5÷0,6 дб. Это уменьшение незначительно возрастает при увеличении m.
чем в случае обнаружения пачечного сигнала, характеризуемого коэффициентом γ=1/m. Уменьшение составляет ≈0,7 дб при Рс=0,5 и F=10-1÷10-6, а при Рс=0,9 оно - ≈0,5÷0,6 дб. Это уменьшение незначительно возрастает при увеличении m.
Далее рассмотрим случай обнаружения флюктуирующего пачечного сигнала с известной формой огибающей, т.е. случай, когда известны соотношения величин Qi.
Известно, что амплитуда сигналов при изменении ракурса наблюдения ВО может флюктуировать в диапазоне 20÷30 дб /см. "Прием сигналов при наличии шума". Под редакцией Л.С.Гуткина. М., изд. Иностр. лит., 1960 г., стр.232/.
С помощью упомянутой цифровой модели и ЭВМ получены характеристики обнаружения для случая, когда величины Qi в принимаемом пачечном сигнале отличаются в n раз от Qi в (5). В результате возникают потери  обусловленные несовпадением применяемой и требуемой по критерию отношения правдоподобия формой границы области Zm. Например, при n=±10 дб; m=8; F=10-3 и
обусловленные несовпадением применяемой и требуемой по критерию отношения правдоподобия формой границы области Zm. Например, при n=±10 дб; m=8; F=10-3 и  величина
величина  а при m=2 - менее 0,01 дб. Если n=±5 дб, то при тех же условиях величина
а при m=2 - менее 0,01 дб. Если n=±5 дб, то при тех же условиях величина  и 0,003 дб соответственно для m=8 и 2. С учетом экспоненциального /см. "Прием сигналов при наличии шума". Под редакцией Л.С.Гуткина. М., изд. Иностр. лит., 1960 г., стр.232/ распределения величины сигнала в диапазоне 25 дб, когда она изменяется относительно
и 0,003 дб соответственно для m=8 и 2. С учетом экспоненциального /см. "Прием сигналов при наличии шума". Под редакцией Л.С.Гуткина. М., изд. Иностр. лит., 1960 г., стр.232/ распределения величины сигнала в диапазоне 25 дб, когда она изменяется относительно  от -8,5 дб до +16,5 дб, средняя величина
от -8,5 дб до +16,5 дб, средняя величина  т.е. не значительна и на практике ею можно пренебречь, а заявленный способ целесообразно использовать и для обнаружения флюктуирующих пачечных эхо-сигналов с известной формой огибающей.
т.е. не значительна и на практике ею можно пренебречь, а заявленный способ целесообразно использовать и для обнаружения флюктуирующих пачечных эхо-сигналов с известной формой огибающей.
В заключение качественно, а не количественно оценим работу заявленного способа по обнаружению быстро флюктуирующего пачечного сигнала с известными значениями средних величин Qi для каждой составляющей такого сигнала.
В /см. "Прием сигналов при наличии шума". Под редакцией Л.С.Гуткина. М., изд. Иностр. лит., 1960 г., стр.231/ указывается, что для обнаружения слабых флюктуирующих пачечных эхо-сигналов целесообразно использовать квадратичный детектор, что соответствует применению решающего правила  а для обнаружения сильных - линейный детектор, что соответствует использованию решающего правила
а для обнаружения сильных - линейный детектор, что соответствует использованию решающего правила  В первом случае, форма границы области Zm, например, при m=2 соответствует дуге окружности, а во втором - прямой линии. Эти формы соответственно для достаточно слабых и достаточно сильных сигналов близки к форме, определяемой по критерию отношения правдоподобия.
В первом случае, форма границы области Zm, например, при m=2 соответствует дуге окружности, а во втором - прямой линии. Эти формы соответственно для достаточно слабых и достаточно сильных сигналов близки к форме, определяемой по критерию отношения правдоподобия.
Использование решающего правила  в случае реализации сильных, за счет флюктуации, сигналов характеризуется некоторыми, хоть и незначительными, энергетическими потерями.
в случае реализации сильных, за счет флюктуации, сигналов характеризуется некоторыми, хоть и незначительными, энергетическими потерями.
Потери наблюдаются и при использовании правила  в случае появления слабых сигналов. Это в данном случае определяется значительным несовпадением формы границы области Zm для большей части спектра значений флюктуирующего сигнала в сравнении с формой, определяемой отношением правдоподобия. Такие потери уменьшаются, если пользоваться решающим правилом (5), т.к., в этом случае, указанное несовпадение в среднем уменьшается. Поэтому использование (5), по сравнению с указанными правилами, дает хоть и незначительно, но лучшие результаты обнаружения.
в случае появления слабых сигналов. Это в данном случае определяется значительным несовпадением формы границы области Zm для большей части спектра значений флюктуирующего сигнала в сравнении с формой, определяемой отношением правдоподобия. Такие потери уменьшаются, если пользоваться решающим правилом (5), т.к., в этом случае, указанное несовпадение в среднем уменьшается. Поэтому использование (5), по сравнению с указанными правилами, дает хоть и незначительно, но лучшие результаты обнаружения.
Возможность осуществления способа рассмотрим через описание работы устройства.
Способ осуществляется следующим образом.
Перед началом работы, точнее заблаговременно, вне режима работы, с помощью пульта оператора в регистр 14 вводится информация о форме огибающей пачечного эхо-сигнала в виде ряда значений отношений сигнал/шум по напряжению для каждой составляющей этого сигнала, который будем называть рядом коэффициентов веса. В соответствии с инструкцией оператора перед работой он с помощью пульта 11 записывает в регистр 12 значение порога, соответствующее на момент времени работы помеховой и шумовой ситуации конкретного региона. Порог может изменяться непосредственно в процессе работы.
В ходе работы отраженные от ВО эхо-сигналы принимают через антенное устройство 1.1 и усиливают в высокочастотной части 1 приемника РЛС, а затем с помощью линейного детектора 2 детектируют (выделяют огибающую каждого сигнала) и преобразуют с помощью АЦП 3 в цифровую форму. Вся дальнейшая цифровая обработка осуществляется при жесткой тактировке с помощью блока 16 управления, который формирует последовательность сигналов управления, временные интервалы между которыми определяются продолжительностью выполнения операций управляемыми блоками. Эта продолжительность определяется быстродействием управляемых блоков и апробируется экспериментально при настройке блока управления. Блок 9 управления может быть реализован, например, при использовании циклического генератора сигналов управления, в котором временные интервалы между выходными сигналами формируются путем заранее определяемых конкретных обратных связей этого генератора и которые могут быть оперативно изменены /см. Б.И.Крыжановский "Электронное колесо". Радиоэлектроника и связь, "Знание". 1991 год, № 5, стр.24/.
При этом полученные значения величин эхо-сигналов в порядке поступления с помощью СчАЗ 5 записывают во входное ЗУ 4, устроенное, например, по кольцевому принципу адресации и имеющее емкость, превышающую необходимую для обнаружения максимально возможного числа ВО. Во входном ЗУ 4 для каждого обнаруживаемого ВО хранятся все (m) значения величин составляющих пачечный сигнал, а при поступлении нового значения самое старое стирается. В результате реализуется "подвижное окно" анализа входной информации. С помощью СчАЧ 6 считывают из ЗУ 4 значения m сигналов строго в соответствии с очередностью их поступления из АЦП 3 и передают на первый вход вычислителя 15, а на второй вход - ряд коэффициентов веса, передаваемых из регистра 14, в той же последовательности, что и значения сигналов из ЗУ 4. В вычислителе 15 рассчитываются m значений отношения правдоподобия и их произведение, которое поступает на второй вход компаратора 13 для сравнения с пороговой величиной, поступающей через первый вход компаратора 13 от регистра 12. Причем если величина произведения m значений отношений правдоподобия не превышает величину порогового значения, то принимается решение, что анализируемая пачка сигналов для данного предполагаемого ВО является ложной. Этот ВО не отображают на индикаторе 10 и не выдают на выход 17 устройства для дальнейшей обработки. В противном случае при превышении порогового значения принимают решение об обнаружении ВО, который отображают на индикаторе 10 и выдают информацию об этом ВО на выход 17 устройства для дальнейшей обработки через блок выдачи информации 9, представляющий собой регистр, на который записывают информацию о дальности "подвижного окна" анализа, а также азимут и величины анализируемых составляющих пачечного сигнала с последующей их выдачей при условии превышения порогового значения величиной отношения правдоподобия для всего пачечного сигнала.
Аналогично по другим пачкам сигналов обнаруживают другие ВО на данном обзоре РЛС. На очередных обзорах РЛС также обрабатывают новые пачки эхо-сигналов каждого ВО, подтверждая или опровергая правильность их обнаружения.
Источники информации
1. М.Сколник. Справочник по радиолокации, том 1. Сов. радио, 1976 г.
2. Теоретические основы радиолокации. Под редакцией Я.Д.Ширмана. М., Сов. радио, 1970 г.
3. С.К.Тюльпанов. Патент № 2210790 РФ за 2003 г., Бюл.№ 23.
4. Прием сигналов при наличии шума. Под редакцией Л.С.Гуткина. М., Издательство иностр. лит., 1960 г.
5. Д.Миддлтон. Введение в статистическую теорию связи. Перевод с англ. под редакцией Б.Р.Левина. М., Сов. радио, том 1, 1961 г. и том 2, 1962 г.
6. Б.Р.Левин. Теоретические основы статистической радиотехники. М., Радио и связь, 1989 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕЛЕКЦИИ ПОЛЕЗНОЙ ИНФОРМАЦИИ В ОБНАРУЖИТЕЛЯХ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2210790C2 |
| СПОСОБ ЛОКАЛЬНОЙ ПАЧЕЧНОЙ ОБРАБОТКИ ПРИНИМАЕМЫХ РЛС СИГНАЛОВ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2382381C2 |
| Радиолокационный способ обнаружения малозаметных целей в импульсно-доплеровской РЛС с ФАР | 2019 |
|
RU2711115C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1991 |
|
RU2255354C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛИ | 2015 |
|
RU2581898C1 |
| Способ обнаружения радиолокационных сигналов и радиолокационная станция для его осуществления | 2016 |
|
RU2610304C1 |
| СПОСОБ ОЦЕНКИ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ АЭРОДИНАМИЧЕСКОЙ ЦЕЛИ | 2021 |
|
RU2773818C1 |
| Способ и устройство измерения высоты и составляющих скорости по сигналам двухканального когерентного радиовысотомера | 2024 |
|
RU2832999C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЦЕЛЕЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270461C2 |
| Способ обнаружения воздушных объектов при зондировании сверхкороткими радиоимпульсами | 2022 |
|
RU2791275C1 |
Изобретение относится к области радиолокации и может быть использовано для обнаружения флюктуирующих эхо-сигналов от воздушных объектов. Достигаемым техническим результатом является обеспечение обнаружения по критерию отношения правдоподобия пачечных радиолокационных сигналов с огибающей известной формы путем использования вычислителя с достаточным быстродействием, а также путем априорной регистрации, до начала обработки, информации об огибающей пачечного эхо-сигнала, последующего анализа входной информации и расчета в вычислителе для "m" сигналов - "m" значений отношения правдоподобия и их произведений для сравнения с порогом и принятия решения об обнаружении воздушного объекта. 2 н.п. ф-лы, 3 ил.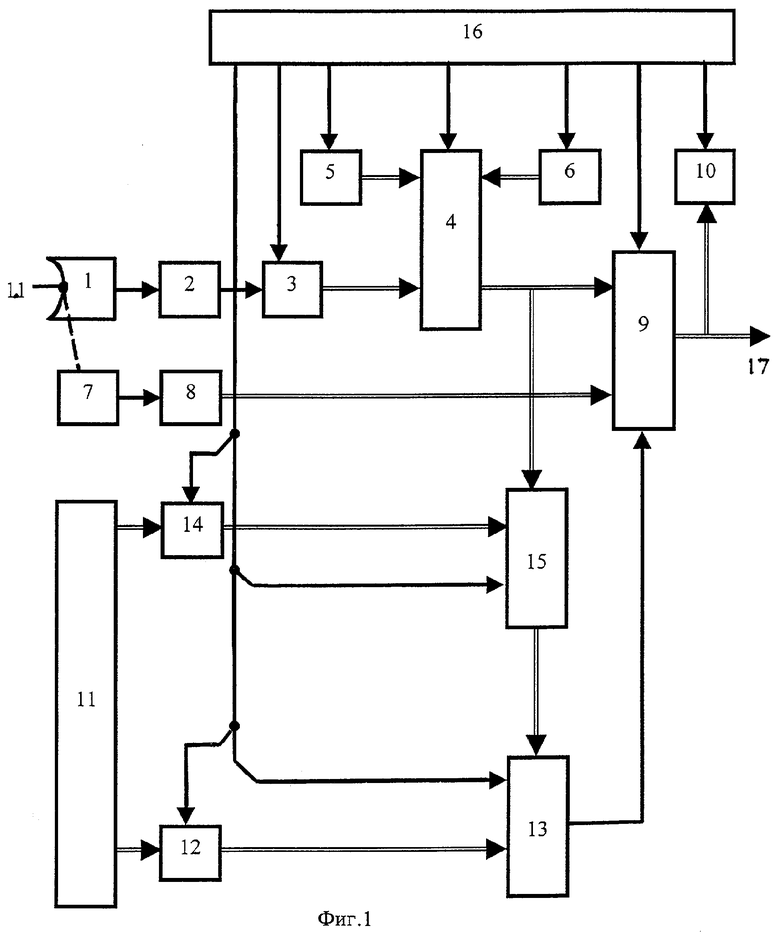
| СПОСОБ СЕЛЕКЦИИ ПОЛЕЗНОЙ ИНФОРМАЦИИ В ОБНАРУЖИТЕЛЯХ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2210790C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ИМПУЛЬСНОГО РАДИОСИГНАЛА НА ФОНЕ МЕШАЮЩЕГО РАДИОИМПУЛЬСА И БЕЛОГО ШУМА | 1999 |
|
RU2160905C1 |
| РАНГОВЫЙ АДАПТИВНЫЙ ПОСЛЕДОВАТЕЛЬНЫЙ ОБНАРУЖИТЕЛЬ СИГНАЛОВ | 1996 |
|
RU2100822C1 |
| US 6114956 А, 05.09.2000 | |||
| Аппарат для осахаривания и пропорционального деления затора | 1943 |
|
SU68706A1 |

