Настоящее изобретение относится к топографии, профилометрии, в частности к бесконтактным методам измерений формы поверхности сложных трехмерных объектов с помощью оптического излучения, и может быть использовано в машиностроении, медицине, стоматологии, судебно-медицинской экспертизе.
Известен способ оптического измерения формы поверхности трехмерного объекта, описанный в статье J.-F. Lin, X.-Y. Su "Two-dimensional Fourier transform profilometry for the automatic measurement of three-dimensional object shapes", Optical Engineering, Vol. 34, No.11, PP.3297-3302, 1995. Способ заключается в том, что исходный трехмерный объект освещают по произвольно выбранному 1-му направлению пучком света, пространственное распределение интенсивности которого в плоскости, перпендикулярной оптической оси пучка, изменяется по заданному периодическому закону. По 2-му направлению, отличному от 1-го и совпадающему с оптической осью отображающей оптической системы, регистрируют 1-е изображение объекта, которое представляет собой полутоновое изображение объекта, промодулированное пространственным распределением интенсивности освещающего пучка. Далее заменяют исходный трехмерный объект объектом с плоской поверхностью, поперечные размеры которой превышают размеры освещающего пучка, а нормаль к указанной поверхности лежит в плоскости, проходящей через оптические оси освещающего пучка и отображающей оптической системы, и освещают эту плоскую поверхность тем же излучением по выбранному 1-му направлению. По 2-му направлению регистрируют 2-е изображение, яркость которого пропорциональна пространственному распределению интенсивности освещающего пучка в плоскости объекта. Полученные изображения используются для дальнейшего восстановления формы поверхности исходного трехмерного объекта.
Суть дальнейшего восстановления формы заключается в следующем. Пусть пространственное распределение интенсивности освещающего пучка света в плоскости, перпендикулярной оптической оси пучка, изменяется по гармоническому закону, например, его можно представить в виде решетки из прямых параллельных полос, интенсивность которых в перпендикулярном направлении описывается синусоидальной функцией. Так как 2-е направление регистрации изображения отличается от 1-го направления проецирования полос, то полосы на изображении из-за параллакса будут искривляться. В некотором смысле 1-е изображение представляет собой интерферограмму. Информация о форме поверхности закодирована в отклонении полос, то есть в сдвиге полос.
Основные этапы вычислительной процедуры обработки полученных изображений и восстановления по ним профиля поверхности перечислены ниже. Раздельно над 1-м и 2-м изображениями выполняют следующие операции.
1. Выполняют преобразование Фурье (одномерное или двумерное). Так как яркость изображений промодулирована по периодическому (синусоидальному) закону, то их пространственный Фурье-спектр будет иметь ярко выраженные пики (в оптике - порядки дифракции) вблизи пространственных частот, кратных частоте модуляции.
2. Выделяют +1-й (или -1-й) порядок Фурье-спектра изображения с помощью полосового частотного фильтра.
3. Выполняют обратное преобразование Фурье над выделенным участком Фурье-спектра с образованием комплексного изображения.
После этого осуществляют совместную обработку комплексных изображений, полученных из 1-го и 2-го изображений. Эту обработку производят последовательно для каждой точки изображений, и она заключается в перемножении 1-го и комплексно сопряженного 2-го комплексных изображений, логарифмировании полученного нового комплексного изображения и выделении у него мнимой части. В результате проведенных операций восстанавливается разность функций, по которой вычисляется двумерная карта значений высоты поверхности исходного трехмерного объекта относительно плоской поверхности.
Основной недостаток известного способа заключается в существенном ограничении класса исследуемых объектов. Это вызвано следующим.
Для успешной работы описанной выше процедуры восстановления формы объекта и повышения точности восстановления профиля поверхности необходимо, чтобы на всех частях объекта было достаточно большое количество полос. Это необходимо для того, чтобы спектр вблизи ±1-го порядков дифракции не перекрывался бы со спектром нулевого порядка. Расстояние между 0-м и ±1-м порядками в частотной области определяется частотой решетки (или периодом полос). Более хорошего разделения порядков дифракции можно добиться путем увеличения этой частоты решетки. Однако пространственная частота не может возрастать до бесконечности. Ее верхний предел ограничен пространственным разрешением оптической и цифровой системы обработки изображений. В настоящее время для регистрации и ввода изображений в ЭВМ используются в основном ПЗС-камеры. Наибольшее распространение получили стандартные телевизионные ПЗС-матрицы, имеющие около 700х500 ячеек (пикселов). Так как для правильной передачи одного периода синусоидальной решетки требуется не менее 10 отсчетов, то на весь кадр для такой матрицы придется не более 70 вертикальных полос решетки. Эта величина и ограничивает на практике максимальное число полос, которое можно спроектировать на объект. Обычно отображающую оптическую систему (параметры объективов) подбирают так, чтобы изображение объекта занимало весь кадр. В этом случае на объекте будет около 70 полос. Если же объект или его часть занимают меньшую площадь кадра, то на них приходится и меньше полос. Из практики известно, что хорошее разделение 0-го и ±1-го порядков дифракции можно получить, имея не менее 30-35 полос на объекте. Следовательно, на всех участках изображения объекта должно быть не менее 35 полос. Так как общее число полос в кадре не может превышать 70 полос, то это означает, что объект не может иметь участки, ширина которых меньше половины кадра. Это условие сильно ограничивает класс исследуемых объектов. Как правило, исследуются объекты на какой-либо подстилающей поверхности типа барельефов, которые занимают весь кадр. Однако это узкий класс объектов. Часто требуется измерить трехмерную поверхность объемных объектов, для чего приходится вращать объект, чтобы измерить форму поверхности с разных ракурсов. В этом случае изображение объекта будет занимать часть кадра, а остальная площадь кадра будет темной.
Для таких объектов также есть ограничение. Они не должны иметь узких участков, ориентированных вдоль направления полос, так как эти участки изображения объекта будут заполнены малым числом полос. Спектр изображения от этих узких участков будет широким и он будет перекрываться с нулевым порядком. Соответственно, эти участки объекта будут восстанавливаться с искажениями, то есть с меньшей точностью.
В основу настоящего изобретения положена задача создания способа оптического измерения формы поверхности трехмерного объекта, обеспечивающего за счет формирования дополнительных изображений возможность хорошего разделения порядков в спектре изображений, что позволяет использовать предлагаемый способ для всех типов объектов при повышении точности измерений.
Поставленная задача решается тем, что в способе оптического измерения формы поверхности трехмерного объекта, заключающемся в том, что исходный трехмерный объект освещают по произвольно выбранному первому направлению пучком света, пространственное распределение интенсивности которого в плоскости, перпендикулярной оптической оси пучка, изменяется по заданному периодическому закону, а по второму направлению, отличному от первого и совпадающему с оптической осью отображающей оптической системы, регистрируют первое изображение объекта, которое представляет собой полутоновое изображение исходного трехмерного объекта, промодулированное пространственным распределением интенсивности освещающего пучка, заменяют исходный трехмерный объект объектом с базовой плоской поверхностью, поперечные размеры которой превышают размеры освещающего пучка, а нормаль к указанной поверхности лежит в плоскости, проходящей через оптические оси освещающего пучка и отображающей оптической системы, освещают объект с базовой плоской поверхностью тем же излучением по выбранному первому направлению, а по второму направлению регистрируют второе изображение, яркость которого пропорциональна пространственному распределению интенсивности освещающего пучка в плоскости объекта с базовой плоской поверхностью, полученные изображения используют для дальнейшего восстановления формы поверхности исходного трехмерного объекта, согласно изобретению исходный трехмерный объект дополнительно освещают по первому направлению пучком света, пространственное распределение интенсивности которого в плоскости, перпендикулярной оптической оси пучка, однородно, а по второму направлению регистрируют третье изображение объекта, которое представляет собой полутоновое изображение исходного трехмерного объекта, по полученному третьему изображению формируют четвертое изображение, которое представляет собой двухградационное изображение исходного трехмерного объекта, состоящее из белых областей, в которых яркость превышает предварительно установленный уровень, и черных областей, в которых яркость ниже указанного уровня, синтезируют пятое изображение, совпадающее с первым изображением в белых областях четвертого изображения и со вторым изображением в черных областях четвертого изображения, а для восстановления формы поверхности исходного трехмерного объекта выполняют совместную обработку пятого и второго изображений.
В предлагаемом способе за счет формирования дополнительного 3-го изображения получают двухградационное 4-е изображение и по нему определяют границы исходного трехмерного объекта. Вне этих границ изображение исходного объекта дополняют изображением объекта с базовой плоской поверхностью. В результате этих операций синтезируют 5-е изображение, которое имеет полосатую структуру по всему кадру. Это приводит к тому, что спектр такого изображения будет иметь четко выраженные узкие порядки, которые легко отделить от нулевого порядка и, соответственно, повысить точность восстановления профиля.
В дальнейшем предлагаемое изобретение поясняется конкретным примером его выполнения и прилагаемыми чертежами, на которых:
фиг.1 изображает пример 1-го изображения исходного трехмерного объекта в виде шара, промодулированного полосатой структурой;
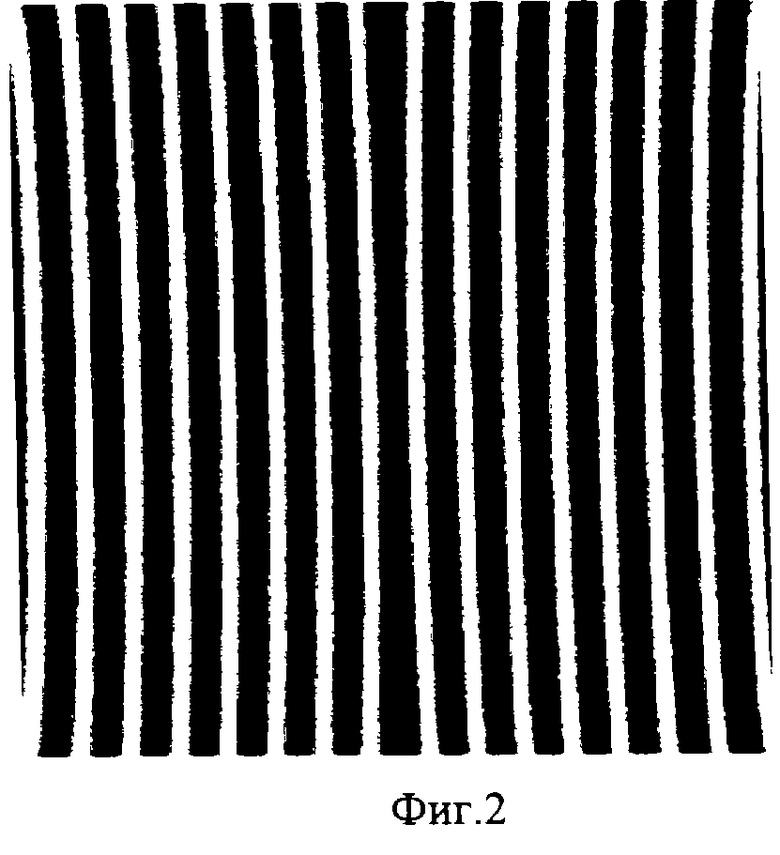
фиг. 2 - пример 2-го изображения объекта с базовой плоской поверхностью, промодулированного полосатой структурой;
фиг.3 - пример 3-го полутонового изображения объекта в виде шара;
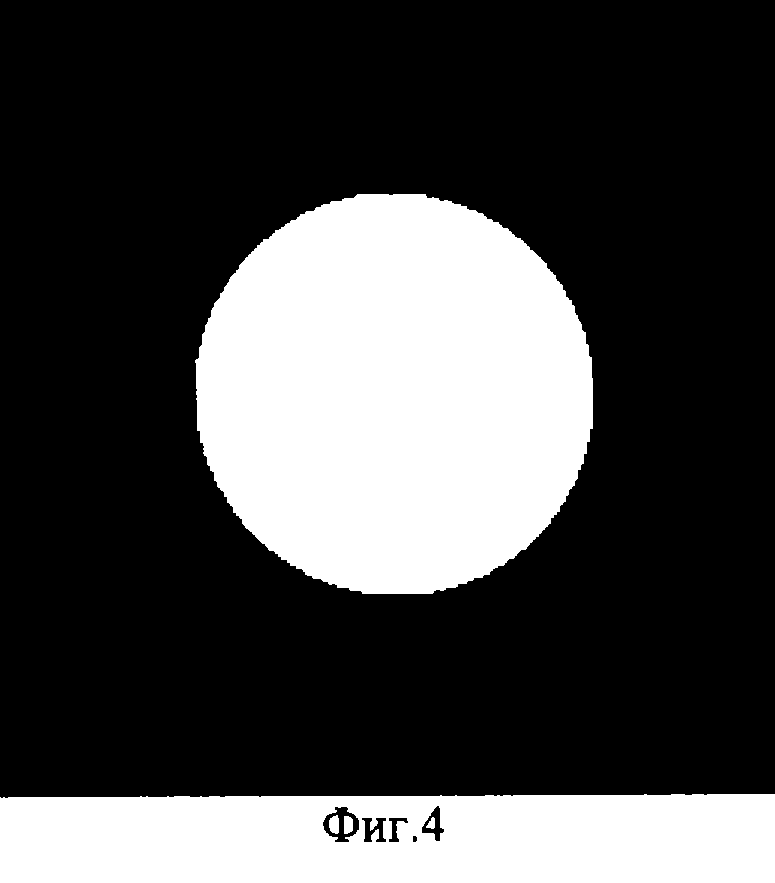
фиг.4 - двухградационное изображение объекта в виде шара;
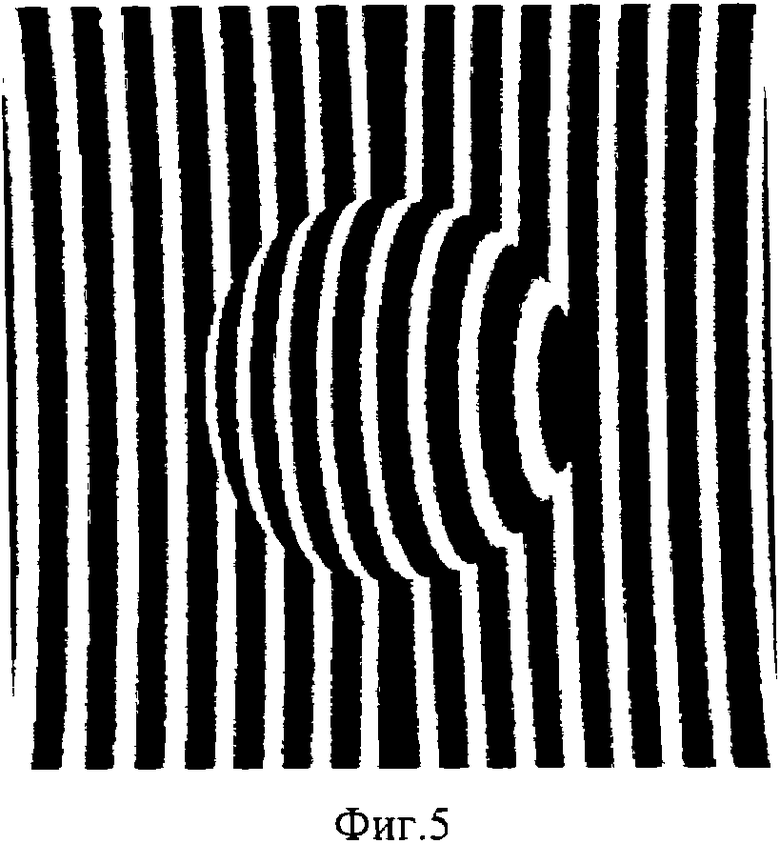
фиг.5 - пример 5-го изображения исходного трехмерного объекта в виде шара, дополненного полосатой структурой вне границы объекта;
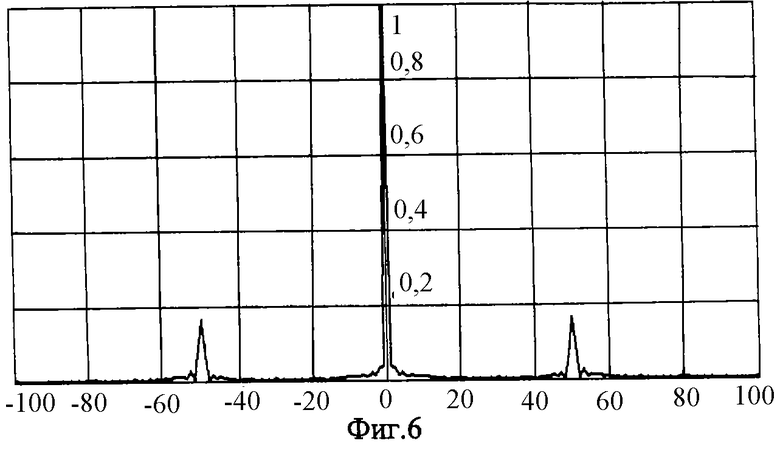
фиг. 6 - характерный график одномерного Фурье-спектра изображения объекта, промодулированного полосатой структурой;
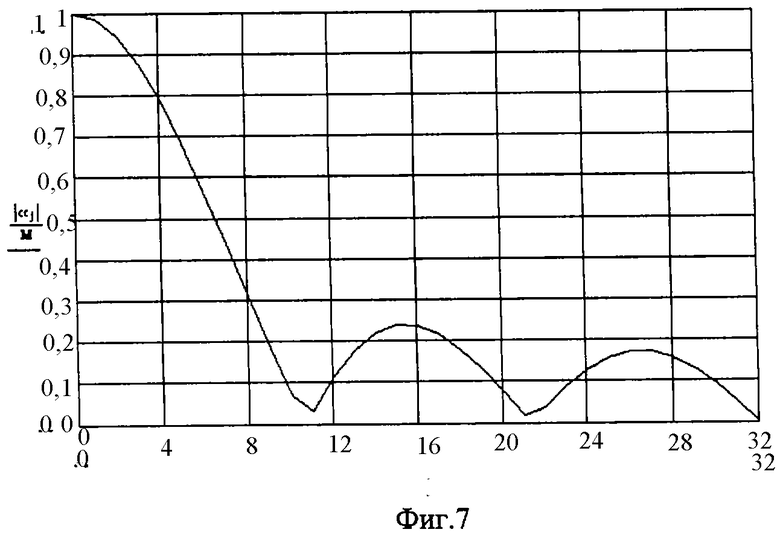
фиг. 7 - график +1-го порядка Фурье-спектра изображения объекта в виде узкой "ступеньки";
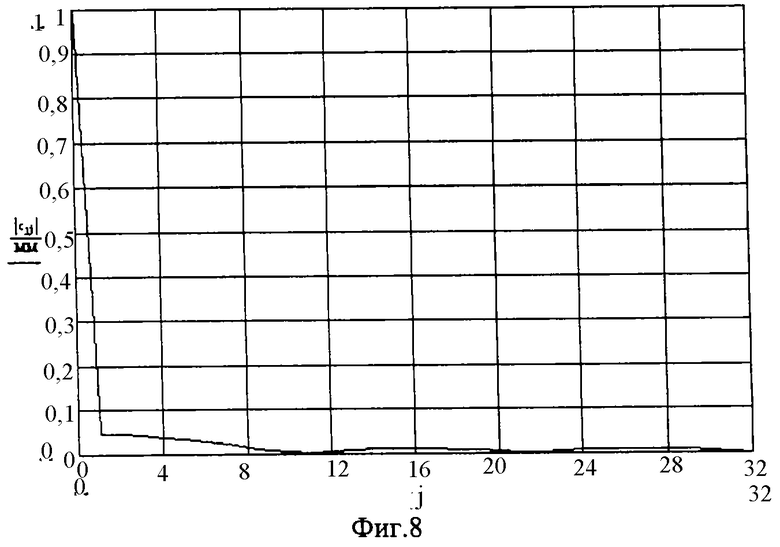
фиг. 8 - график +1-го порядка Фурье-спектра изображения объекта в виде узкой "ступеньки" с дополнением ее полосатой структурой.
Предлагаемый способ оптического измерения формы поверхности трехмерного объекта осуществляют следующим образом.
Исходный трехмерный объект освещают по произвольно выбранному 1-му направлению пучком света, пространственное распределение интенсивности которого в плоскости, перпендикулярной оптической оси пучка, изменяется по заданному периодическому закону. Выбирают, например, гармонический закон. По 2-му направлению, отличному от 1-го и совпадающему с оптической осью отображающей оптической системы, регистрируют 1-е изображение объекта, которое представляет собой полутоновое изображение исходного трехмерного объекта, промодулированное пространственным распределением интенсивности освещающего пучка. Для гармонического (синусоидального) закона интенсивность 1-го изображения можно описать следующим выражением:
i1(x, y)=a(x, y)+b(x, y)cos[u0x+f1(x, y)], (1),
где а - амплитудный фон, b - видность полос, u0 - частота полос, f1 - искомая функция (фаза), которая связана с профилем рельефа поверхности. При данной записи пространственное распределение интенсивности освещающего пучка представляет собой полосатую структуру (решетку), штрихи которой ориентированы вдоль вертикальной оси, перпендикулярно оси x. Пример такого изображения для объекта в виде шара приведен на фиг.1.
Далее заменяют исходный трехмерный объект объектом с базовой плоской поверхностью, поперечные размеры которой превышают размеры освещающего пучка, а нормаль к указанной поверхности лежит в плоскости, проходящей через оптические оси освещающего пучка и отображающей оптической системы, освещают объект с базовой плоской поверхностью тем же излучением по выбранному 1-му направлению, а по 2-му направлению регистрируют 2-е изображение, яркость которого пропорциональна пространственному распределению интенсивности освещающего пучка в плоскости объекта с базовой плоской поверхностью. Второе изображение показано на фиг.2 - это изображение полос на плоском экране, которые также немного искажены, так как освещающая и отображающая оптические системы не идеальны и вносят свои аберрации при построении 1-го и 2-го изображений. Интенсивность 2-го изображения можно описать аналогичным выражением
i2(x, y)=a(x, y)+b(x, y)cos[u0x+f2(x, y)], (2),
где f2 - функция, которая связана с аберрациями оптической системы.
Дополнительно освещают исходный трехмерный объект по 1-му направлению пучком света, пространственное распределение интенсивности которого в плоскости, перпендикулярной оптической оси пучка, однородно, а по 2-му направлению регистрируют 3-е изображение объекта (см. фиг.3). Это 3-е изображение представляет собой полутоновое изображение объекта. Данное изображение не содержит полосатой структуры и оно необходимо для получения 4-го изображения, которое представляет собой двухградационное (бинарное) изображение объекта, состоящее из белых областей, в которых яркость превышает предварительно установленный уровень, и черных областей, в которых яркость ниже того же уровня. Это изображение приведено на фиг.4. Уровень порога выбирается оператором, для каждого изображения он будет свой. Полученное 4-е изображение необходимо для получения границы изображения объекта.
После приведенных выше вспомогательных операций выполняют главную операцию предлагаемого способа - синтезируют 5-е изображение, совпадающее с 1-м изображением в белых областях 4-го изображения и со 2-м изображением в черных областях 4-го изображения. Это изображение приведено на фиг.5. В результате приведенных операций исходное 1-е изображение объекта (фиг.1) будет дополнено полосатой структурой (решеткой) на все темные участки и, соответственно, количество полос на всем кадре будет одинаково велико. Так как для восстановления формы поверхности исходного трехмерного объекта выполняют совместную обработку 5-го и 2-го изображений, то качество восстановления повышается.
Для доказательства этого факта обратимся к конкретному примеру.
Для дальнейших пояснений удобно приведенные выражения переписать в следующем виде:
i1,2(x, y)=a(x, y)+c1,2(x, y)exp(ju0x)+c1,2*(x, y)exp(-ju0x), (3),
где
c1,2(x, y)=0,5b(x, y)exp[jf1,2(x, y)], (4),
j - комплексная единица, * - значок комплексного сопряжения.
Раздельно над 1-м и 2-м изображениями выполняются следующие операции.
1. Вычисляют преобразование Фурье от изображения (1):
I1,2(u, v)=A(u, v)+C1,2(u-u0, v)+C1,2*(-u-u0, v), (5),
где: прописными буквами обозначены Фурье-образы соответствующих функций, обозначенных выше строчными буквами, u, v - частотные координаты, соответствующие пространственным координатам x, у. Из (5) видно, что при достаточно большой частоте решетки u0 спектр 1-го изображения состоит из трех раздельных частей, соответствующих каждому слагаемому в (5). Причем первое слагаемое A(u, v) описывает спектр вблизи начала координат, его иногда называют нулевой порядок. Второе и третье слагаемые соответственно описывают +1-й и -1-й порядок Фурье-спектра. Характерный график одномерного Фурье-спектра изображений типа (1) показан на фиг.6.
Из (4) следует, что Фурье-спектр в +1-м порядке описывается следующей функцией:
C1(u,v) = 0,5B(u,v)⊗J[expjf1(x,y)], (6)
где B(u, v) - преобразование Фурье от видности полос b(x, у), ⊗ - значок свертки, Ι[.] - операция прямого преобразования Фурье.
2. Выделяют +1-й (или -1-й) порядок Фурье-спектра изображения с помощью полосового частотного фильтра. Математически это означает, что из выражения (5) оставляют, например, только второе слагаемое C1,2(u-u0, v).
3. Выполняют обратное преобразование Фурье над выделенным участком Фурье-спектра с преобразованием комплексного изображения с1,2(x, у).
После этого осуществляют совместную обработку комплексных изображений, полученных из 1-го и 2-го изображений. Эту обработку производят последовательно для каждой точки изображений, и она заключается в перемножении 1-го и комплексно сопряженного 2-го комплексных изображений с1(x, y)•(с2*(x, у), логарифмировании полученного нового комплексного изображения и выделении у него мнимой части. В результате проведенных операций восстанавливается разность функций f1(x, y)-f2(x, у), по которой вычисляется двумерная карта значений высоты поверхности исходного трехмерного объекта относительно плоской поверхности.
Узкий участок изображения объекта с синусоидальными полосами можно описать выражением (1), в котором видность полос b(x, у) отлична от нуля в малой ограниченной области. Для простоты рассмотрим одномерный случай. Пусть b(x)= rect(x/p), то есть b(x)=1 для |x|≤p и b(x)=0 для |x|>p, где p - ширина узкого участка. Известно, что спектр от такой rect-функции равен функции
B(u)=2psin(pu)/(pu), (7),
ширина центрального пика которой 2π/р. Предположим также, что функция f1 в выражении (6) является постоянной и малой величиной, то есть f1=ε<<1. Это означает, что объект выбран в виде узкой и невысокой "ступеньки". Тогда
где δ(.) - дельта-функция Дирака. Подставляя в (6) выражения (7), (8) и используя фильтрующее свойство дельта-функции, получим
Откуда видно, что так как ε малая величина, то ширина спектра в +1-м порядке в основном определяется шириной спектра В, которая равна 2π/р. На фиг.7 приведен график модуля от этой функции в относительных единицах.
После обработки изображения исходного трехмерного объекта по выше описанным операциям полосы будут присутствовать на всем кадре. Это означает, что видность полос b=const по всему изображению. Так как полосы вне объекта и на объекте получены из разных изображений, то на границе объекта будет непредсказуемый сдвиг полос, то есть сдвиг фазы. Сдвиг на целое число полос определить невозможно, поэтому величина этого сдвига не может быть больше 1/2 от периода полос, который равен 1/u0. Это означает, что такое изображение можно описать уравнением (1), в котором фаза f1(x) = αεrect(x/p), где α<1/2u0, а видность b=const. Тогда B(u) = δ(u) и
Оценим ширину спектра в +1-м порядке для вновь сформированного изображения с дополненными полосами. Подставляя данные выражения в (6), получим:
C1(u) = δ(u)+jαε2psin(pu)/(pu). (10)
При сравнении полученного выражения (10) с (9), видно, что спектр нового изображения (10), как и для (9), в основном определяется первым слагаемым и он значительно уже, чем спектр (9) исходного изображения. Этот факт также подтверждается и результатами численного расчета спектра в +1-м порядке от нового изображения, представленный на фиг. 8. На графике из фиг.7 ширина спектра по уровню 0,1 около 10 отсчетов, тогда как на фиг.8 ширина спектра по тому же уровню 0,1 стала всего в 1 отсчет, то есть в 10 раз уже. Уменьшение ширины спектра в ±1-х порядках позволяет уверенно отделить их от нулевого порядка. Следовательно, не будет перекрытия спектров и, как следствие, улучшится качество восстановления формы поверхности даже на узких участках объекта.
Таким образом, с использованием предлагаемого способа можно измерять форму поверхности любого сложного объекта с одновременным повышением точности измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПТИЧЕСКОГО ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ ТРЕХМЕРНОГО ОБЪЕКТА (ВАРИАНТЫ) | 2003 |
|
RU2232373C1 |
| СПОСОБ ИНТЕРФЕРЕНЦИОННОЙ МИКРОСКОПИИ | 2013 |
|
RU2536764C1 |
| СПОСОБ ОПТИЧЕСКОЙ ТОМОГРАФИИ ТРЕХМЕРНЫХ МИКРООБЪЕКТОВ И МИКРОСКОП ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2145109C1 |
| СПОСОБ КОНФОКАЛЬНОЙ СКАНИРУЮЩЕЙ ТРЕХМЕРНОЙ МИКРОСКОПИИ И КОНФОКАЛЬНЫЙ СКАНИРУЮЩИЙ ТОМОГРАФИЧЕСКИЙ МИКРОСКОП | 1999 |
|
RU2140661C1 |
| СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ ТРЕХМЕРНОГО ОБЪЕКТА | 2011 |
|
RU2472108C1 |
| ИНТЕРФЕРЕНЦИОННЫЙ МИКРОСКОП | 2013 |
|
RU2527316C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ ТРЕХМЕРНОГО ОБЪЕКТА | 2011 |
|
RU2474787C1 |
| Способ определения координат изменения структуры клетки по фазовым изображениям | 2021 |
|
RU2761480C1 |
| ФАЗОВО-ИНТЕРФЕРЕНЦИОННЫЙ МОДУЛЬ | 2013 |
|
RU2539747C1 |
| Способ получения изображения сечения трехмерного объекта | 1987 |
|
SU1425578A1 |

Изобретение относится к топографии, профилометрии. Сущность изобретения заключается в том, что исходный объект освещают по произвольно выбранному первому направлению пучком света, пространственное распределение интенсивности которого в плоскости, перпендикулярной оптической оси пучка, изменяется по заданному периодическому закону. По второму направлению, отличному от первого и совпадающему с оптической осью отображающей оптической системы, регистрируют первое изображение. Заменяют исходный объект объектом с базовой плоской поверхностью, освещают его тем же излучением по первому направлению, а по второму направлению регистрируют второе изображение. Исходный объект дополнительно освещают по первому направлению пучком света, пространственное распределение интенсивности которого в плоскости, перпендикулярной оптической оси пучка, однородно, а по второму направлению регистрируют третье изображение объекта, представляющее собой полутоновое изображение исходного объекта. По третьему изображению формируют четвертое, представляющее собой двухградационное изображение исходного объекта, состоящее из белых областей и черных областей. Синтезируют пятое изображение, совпадающее с первым изображением в белых областях четвертого изображения и со вторым изображением в черных областях четвертого изображения. Для восстановления формы поверхности исходного трехмерного объекта выполняют совместную обработку пятого и второго изображений. Технический результат: измерение формы поверхности любого сложного объекта с одновременным повышением точности измерений. 8 ил.
Способ оптического измерения формы поверхности трехмерного объекта, заключающийся в том, что исходный трехмерный объект освещают по произвольно выбранному первому направлению пучком света, пространственное распределение интенсивности которого в плоскости, перпендикулярной оптической оси пучка, изменяется по заданному периодическому закону, а по второму направлению, отличному от первого и совпадающему с оптической осью отображающей оптической системы, регистрируют первое изображение объекта, которое представляет собой полутоновое изображение исходного трехмерного объекта, промодулированное пространственным распределением интенсивности освещающего пучка, заменяют исходный трехмерный объект объектом с базовой плоской поверхностью, поперечные размеры которой превышают размеры освещающего пучка, а нормаль к указанной поверхности лежит в плоскости, проходящей через оптические оси освещающего пучка и отображающей оптической системы, освещают объект с базовой плоской поверхностью тем же излучением по выбранному первому направлению, а по второму направлению регистрируют второе изображение, яркость которого пропорциональна пространственному распределению интенсивности освещающего пучка в плоскости объекта с базовой плоской поверхностью, полученные изображения используют для дальнейшего восстановления формы поверхности исходного трехмерного объекта, отличающийся тем, что исходный трехмерный объект дополнительно освещают по первому направлению пучком света, пространственное распределение интенсивности которого в плоскости, перпендикулярной оптической оси пучка, однородно, а по второму направлению регистрируют третье изображение объекта, которое представляет собой полутоновое изображение исходного трехмерного объекта, по полученному третьему изображению формируют четвертое изображение, которое представляет собой двухградационное изображение исходного трехмерного объекта, состоящее из белых областей, в которых яркость превышает предварительно установленный уровень, и черных областей, в которых яркость ниже указанного уровня, синтезируют пятое изображение, совпадающее с первым изображением в белых областях четвертого изображения и со вторым изображением в черных областях четвертого изображения, а для восстановления формы поверхности исходного трехмерного объекта выполняют совместную обработку пятого и второго изображений.
| Jin-Feng Lin, Xian-Yu Su | |||
| Two-dimensional fourier transform profilometry for the automatic | |||
| measurement of three-dimensional object shapes | |||
| - OPTICAL ENGINEERING, Nov | |||
| Топка с качающимися колосниковыми элементами | 1921 |
|
SU1995A1 |
| Средство для предпосевной обработки семян ярового ячменя и озимой пшеницы | 2022 |
|
RU2785674C1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |

