Область техники
Изобретение относится к способу для выполнения фазовой компенсации в системе управления механического транспортного средства, в котором производная по времени от выходного сигнала цепи, содержащейся в системе управления, ограничена относительно производной по времени от входного сигнала этой цепи, если производная по времени для входного сигнала превосходит заданное значение. Изобретение также относится к устройству для выполнения фазовой компенсации в системе управления транспортного средства с приводом от двигателя, которая включает в себя схему, содержащую ограничивающее средство для ограничения производной по времени выходного сигнала относительно производной по времени от входного сигнала цепи, если производная по времени от входного сигнала превосходит заданное значение, установленное ограничивающим средством.
Предшествующий уровень техники
Все системы управления (транспортных средств) имеют физические приводы, например, электрические моторы, гидравлические сервоклапаны и т.п. Все эти приводы имеют ограничения скорости, обусловленные ограничениями в энергоснабжении, гидравлическом давлении и т.п. Таким образом, всем системам управления присущи ограничения, касающиеся скорости, при которой новая команда от водителя транспортного средства, т.е. изменение входного сигнала в системе управления, может дать нарастание соответствующих изменений в физическом выходном сигнале, выдаваемом из системы управления. Если производная по времени от входного сигнала превосходит определенное значение, производная по времени от выходного сигнала ограничивается относительно производной по времени от входного сигнала. Это ограничение известно как ограничение скорости системы управления. Когда выполняются очень быстрые изменения входного сигнала, например, когда входной сигнал к системе управления состоит из чрезмерно быстрого (или большого) синусоидального сигнала, имеет место сдвиг фазы между входным сигналом и выходным сигналом. То есть выходной сигнал подвергается задержке по времени относительно входного сигнала. Этот фазовый сдвиг ведет к ухудшению характеристики транспортного средства и в самом худшем случае может привести к увеличению неустойчивости.
В применении к авиации может произойти так называемое PIO (Колебания - пилот в мертвой петле - Pilot In-the loop Oscillation), когда слишком быстрое изменение входного сигнала приводит к ограничению скорости системы управления, которое должно быть преодолено. Это может произойти, если непредвиденные обстоятельства заставят пилота выполнить быстрое и большое движение рукояткой управления самолета. Фазовый сдвиг, который произойдет из-за ограничения скорости системы управления, усилит колебания. В худшем случае эти колебания становятся расходящимися, что может привести к потере управления во время движения самолета.
Вышеупомянутое ограничение скорости более заметно в самолете, который составляет так называемую неустойчивую систему. В самолете этого типа на управляющие поверхности самолета воздействуют не только сигналы пилота, но также сигналы стабилизации, генерируемые в системе управления, которые зависят от величин, полученных от датчиков в различных точках самолета.
Один способ уменьшения вышеупомянутых проблем в системах управления с ограничением скорости включает введение фазовой компенсации, когда действует ограничение скорости. Такая фазовая компенсация должна удовлетворять следующим требованиям:
А. уменьшать запаздывание по фазе в случае синусоидальных входных сигналов;
В. минимизировать динамическое запаздывание для быстрых линейных изменений и перепадов;
С. обеспечивать одинаковый входной и выходной сигнал, когда входные сигналы достаточно медленные.
Различные способы выполнения фазовой компенсации в системах управления ранее описаны в работе Buchholz, J.J. (1993): "Time delay induced by Control Surface Rate Saturation", Zeitschrift f. Flugwissenschaften und Weltraumforschung, Springer Verlag, Vol. 17, pp. 287-293; A'harrah, R.C. (1992); "Communique with DLR and olhers", NASA HQ, Washington DC, July 14th, 1992; and Chalk, C. R. (1992): "Study of a Software Rate Limit Concept", Calspan Flight Research Memorandum 635, Буффало, Нью-Йорк. Эти способы используют логические условия (если-тогда-иначе), чтобы установить, требуется ли выполнить фазовую компенсацию в системе управления. Однако эти условия вызывают необходимость выполнения перехода между, по меньшей мере, двумя различными динамическими режимами для соответствующих способов. Таким образом, всегда могут иметь место входные сигналы, которые вызывают увеличение нежелательного выходного сигнала. По этой причине ни один из этих способов не подходит для реализации в системе управления с ограничением скорости.
Способ для выполнения фазовой компенсации в системе управления описанного типа, решающий вышеупомянутые проблемы, описан в патенте США 5 528 119.
Задачей настоящего изобретения является разработка способа и устройства для выполнения фазовой компенсации в системе управления с ограничением скорости, которые были бы альтернативными вышеупомянутым способам из предшествующего уровня техники.
Раскрытие изобретения
Одной задачей этого изобретения является разработка способа для выполнения фазовой компенсации в фильтре для таких систем, как определенные в пунктах формулы изобретения, путем использования фильтра фазовой компенсации, который имеет нелинейную обратную связь выходного сигнала к входу. Более конкретно, когда имеется погрешность между входным сигналом и выходным сигналом фильтра фазовой компенсации, формируется сигнал ошибки. Если абсолютная величина упомянутого сигнала ошибки превосходит заданное значение, выбирается уровень k нелинейного усиления. Входной сигнал пропускается через фильтр нижних частот и дифференцируется, после чего он умножается на уровень k нелинейного усиления для формирования сигнала δ произведения, который добавляется к входному сигналу и подается к обычному устройству ограничения скорости, таким образом формируя конечный выходной сигнал фильтра фазовой компенсации.
Выходной сигнал, полученный в фильтре после вычитания сигнала δ произведения, находится в фазе с входным сигналом, посылаемым в устройство фильтра.
Уровень фазовой компенсации может быть определен как функция производной входного сигнала и погрешности между входным сигналом и выходным сигналом путем выбора желаемой фильтрации и уровня k нелинейного усиления.
Когда уровень k нелинейного усиления равен нулю или когда дифференцированный входной сигнал равен нулю, фильтр фазовой компенсации действует как обычное устройство ограничения скорости. Одно преимущество фильтра, как это описано согласно вышепредставленному аспекту изобретения, состоит в том, что фильтр фазовой компенсации устойчив против воздействия шума и резонансных помех на основной входной сигнал.
Другим преимуществом фильтра согласно вышеописанному аспекту изобретения является то, что фильтр на сигналы, сформированные входным скачком, действует как обычное устройство ограничения скорости в течение интервала времени, в то время как задержка по времени между входным сигналом и выходным сигналом должна быть как можно короче. В этом состоит разница между этим изобретением и способом, описанным в патенте США 5 528 119, где выходной сигнал имеет экспоненциальное затухание в направлении входного сигнала. В зависимости от конкретной ситуации может быть выгодным любой из этих двух способов.
Еще одним преимуществом фильтра согласно изобретению является то, что фильтр действует только тогда, когда это необходимо, что может происходить в редких случаях, а вероятно, и никогда.
Фигура 1 показывает пример действия фильтра фазовой компенсации согласно изобретению в виде кривой y, выходного сигнала (сплошная линия), являющегося реакцией фильтра на входной сигнал, показанный кривой u (штриховая линия) на этой фигуре. Соответствующий сигнал в виде реакции на тот же входной сигнал при использовании обычного устройства ограничения показан точечной кривой с.
Можно заметить, что ответный выходной сигнал y от фильтра согласно изобретению намного быстрее следует за ступенчатой функцией в виде показанной кривой для входного сигнала u по сравнению с выходным сигналом от обычного устройства ограничения скорости.
Изобретение в первую очередь адаптировано для использования в управлении самолетом, но также может быть использовано в системе управления транспортным средством любого типа.
Согласно другому аспекту изобретения раскрыто устройство для осуществления способа. Упомянутое устройство описано в пунктах формулы изобретения и дополнительно в описании вариантов выполнения.
Краткое описание чертежей
Фигура 1 показывает входной сигнал (u) и выходной сигнал (y) фильтра согласно изобретению и для сравнения кривую (точечную), показывающую выходной сигнал от обычного устройства ограничения скорости.
Фигура 2 схематически показывает пример выполнения фильтра фазовой компенсации согласно изобретению.
Варианты выполнения
Изобретение в первую очередь предназначено для использования в управлении самолетом, который составляет так называемую неустойчивую систему. Следует отметить, однако, что концепция изобретения также распространяется на системы управления в других типах транспортных средств с приводом от двигателя и может быть применена к ним.
Ссылаясь теперь на чертежи, на фиг. 2 показан вариант исполнения устройства фильтра согласно изобретению. Входной сигнал к устройству фильтра обозначен буквой u, а выходной сигнал из устройства обозначен буквой y.
Входной сигнал u поступает в главную ветвь устройства и проходит первую функцию 2 суммирования, из которой вычитается сигнал δ произведения. После вычитания сигнала δ произведения из входного сигнала u формируется результирующий сигнал х. Результирующий сигнал х затем направляется к обычному устройству 3 ограничения скорости, посредством которого генерируется выходной сигнал y на выходе устройства ограничения скорости.
Входной сигнал u дополнительно проводится в первой параллельной ветви к фильтру 4 нижних частот обычного типа, например фильтру, имеющему функцию передачи
G(s)=К/(τs+1),
где К представляет собой коэффициент усиления фильтра 4, а τ - его постоянная времени. В нормальных условиях входной сигнал изменяется более медленно, чем ограничение, применимое к производной по времени от входного сигнала. Таким образом, в нормальном случае ни устройство 3 ограничения скорости, ни фильтр 4 обратной связи не будут активированы в устройстве согласно изобретению.
В первой параллельной ветви сигнал после прохождения фильтра нижних частот поступает в дифференцирующий блок 5, где сигнал дифференцируется, после чего он входит в умножитель 6, в котором сигнал, прошедший через фильтр нижних частот и от которого взята производная, умножается на коэффициент k. Сигнал, сформированный после умножения на коэффициент k, является сигналом δ произведения, упоминаемым выше.
Входной сигнал u, посылаемый к устройству, так же, как выходной сигнал y от устройства фильтра, направляется ко второй функции 7 суммирования во второй параллельной ветви устройства. Во второй функции 7 суммирования генерируется второй сигнал ε погрешности. Второй сигнал ε погрешности затем усиливается в нелинейном усилителе для формирования коэффициента k, посылаемого к вышеупомянутому умножителю 6.
Работа варианта выполнения согласно фиг.2 может быть понята из следующего его описания.
Входной сигнал u к устройству 1 фильтра направляется ко второй функции 7 суммирования, так же, как выходной сигнал от устройства 1 фильтра. Выходной сигнал y вычитается из входного сигнала u во второй функции 7 суммирования, после чего формируется второй сигнал ε погрешности. Сигнал ε погрешности подается к нелинейному усилителю 8, где амплитуда второго сигнала ε погрешности регулирует величину усиления, таким образом определяя коэффициент k. В качестве примера предпочтительного исполнения величина k установлена в -1, если абсолютная величина второго сигнала ε погрешности больше чем 0,1 (|ε|>0,1). В противном случае значение коэффициента k установлено в ноль.
Входной сигнал u также направляется к фильтру нижних частот, где сигнал отфильтровывается по нижним частотам и затем дифференцируется в дифференцирующем блоке 5, и в конце подается к умножителю 6, где сигнал умножается на вышеупомянутый коэффициент k для формирования сигнала δ произведения. Если коэффициент k не равен нулю, сигнал δ произведения будет иметь знак, противоположный знаку дифференцированного входного сигнала.
Сигнал δ произведения вычитается из входного сигнала u в первой функции 2 суммирования для формирования суммы этих двух сигналов в качестве результирующего сигнала х. Результирующий сигнал х есть сигнал, находящийся в фазе с входным сигналом u.
В конце концов, обычное устройство 3 ограничения скорости ограничивает скорость результирующего сигнала х для формирования выходного сигнала y из устройства 1 фильтра.
Результирующий выходной сигнал y после фазовой компенсации показан в виде сплошной кривой y на фиг. 1. Штриховая кривая u представляет входной сигнал u при скорости, слишком высокой для устройства ограничения скорости. Фигура также содержит точечную кривую, которая представляет выходной сигнал от обычного устройства ограничения скорости, т.е. сигнал, полученный без фазовой компенсации, используемой для коррекции входного сигнала, выполненной в соответствии с изобретением.
Как будет понятно из сравнения кривых с фиг.1, амплитуда выходного сигнала y уменьшается фазовой компенсацией. Однако фазовое смешение между входным и выходным сигналами явно уменьшается, давая выходной сигнал, который реально находится в фазе с входным сигналом. В результате водитель или пилот ощущает более быструю реакцию на команду.
Как было отмечено выше, для целей упрощения фильтр 1 иллюстрировался как содержащий фильтр нижних частот первого порядка. Для достижения хороших результатов важно установить параметры фильтра на определенные значения и эти параметры должны быть определены для каждого применения.
Очевидно и должно быть понятно, что концепция изобретения не может рассматриваться как ограниченная вариантом исполнения, показанным на чертеже, или примером, описанным выше, она может быть изменена многими способами в рамках идеи изобретения. Таким образом, хотя в предпочтительном варианте исполнения определен фильтр нижних частот первого порядка, это сделано с целью упрощения, и должно быть совершенно ясно, что могут быть также использованы другие типы асимптотически устойчивых фильтров.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ФАЗОВОЙ КОМПЕНСАЦИИ В СИСТЕМЕ УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2146385C1 |
| РЕЗЕРВНАЯ СИСТЕМА ДЛЯ ИНДИКАЦИИ КУРСА И ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ НА САМОЛЕТЕ | 2000 |
|
RU2236697C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ РЕГУЛИРОВАНИЯ РУЛЕВОЙ СИЛЫ В МЕХАНИЧЕСКОЙ СИСТЕМЕ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1998 |
|
RU2213025C2 |
| РАДАР ФОРМИРОВАНИЯ ПОДПОВЕРХНОСТНОГО ИЗОБРАЖЕНИЯ | 2008 |
|
RU2453864C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА И СПОСОБ ДЛЯ РАДИОЛОКАТОРА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 2009 |
|
RU2485545C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ АСТАТИЧЕСКОГО ОБЪЕКТА | 1996 |
|
RU2103714C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДАМИ В САМОЛЕТЕ | 2001 |
|
RU2237276C1 |
| УСТРОЙСТВО КОНТУРА ФАЗОВОЙ АВТОПОДСТРОЙКИ ЧАСТОТЫ С ОБРАТНОЙ СВЯЗЬЮ НА ОСНОВЕ ОБЪЕДИНЕННОГО ПРИНЦИПА МАКСИМУМА | 2013 |
|
RU2547635C1 |
| ГАРМОНИЧЕСКОЕ ПРЕОБРАЗОВАНИЕ НА ОСНОВЕ БЛОКА ПОДДИАПАЗОНОВ, УСИЛЕННОЕ ПЕРЕКРЕСТНЫМИ ПРОИЗВЕДЕНИЯМИ | 2011 |
|
RU2551817C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2537201C2 |

Изобретение относится к системам управления транспортными средствами. Технический результат заключается в повышении точности. Достижение результата осуществляется путем использования фильтра фазовой компенсации, который имеет нелинейную обратную связь выходного сигнала к входу. Более конкретно, когда имеется погрешность между входным сигналом и выходным сигналом фильтра фазовой компенсации, формируется сигнал погрешности. Если абсолютная величина сигнала погрешности превосходит заданное значение, выбирается уровень нелинейного усиления сигнала погрешности в усилителе. Входной сигнал пропускается через фильтр нижних частот и дифференцируется в дифференцирующем блоке, после чего он умножается на уровень нелинейного усиления для формирования сигнала произведения, который добавляется к входному сигналу, и суммарный сигнал подается к обычному устройству ограничения скорости, таким образом формируя конечный выходной сигнал фильтра фазовой компенсации. 2 с. и 6 з.п. ф-лы, 2 ил.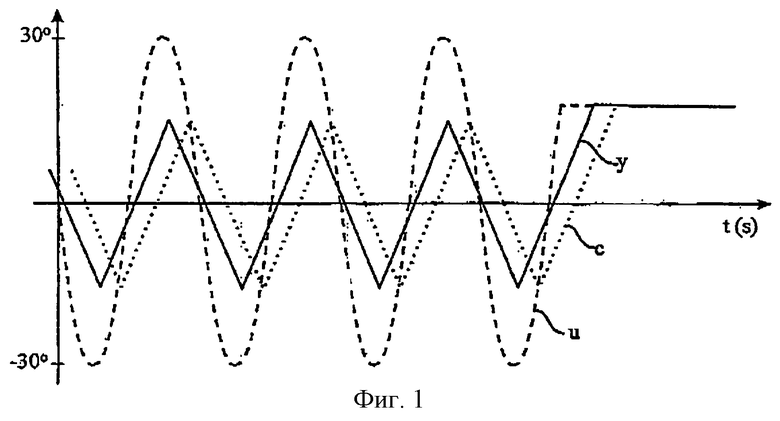
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| Дифференцирующее устройство | 1975 |
|
SU571815A1 |
| US 5528119 A, 18.06.1996 | |||
| US 5173649 A, 22.12.1992 | |||
| BUCHHOLZ J.J | |||
| Time delay induced by Control Surface | |||
| Rate Saturation | |||
| Zeitschrift f | |||
| Flugwissenschaften und | |||
| Weltraumforschung, Springer Verlag, v | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЧЕРТЕЖЕЙ ДЛЯ ОДНООБРАЗНОЙ РАСКРОЙКИ ПРЕДМЕТОВ ОДЕЖДЫ | 1919 |
|
SU287A1 |

