Изобретение относится к устройству и способу выработки команд управления приводами самолета, посредством чего команды управления рассчитываются в зависимости от управляемых параметров, полученных от датчиков и распределенных компьютерам, в которых команды управления рассчитываются в соответствии с принципами управления, которые применяются к каждому приводу.
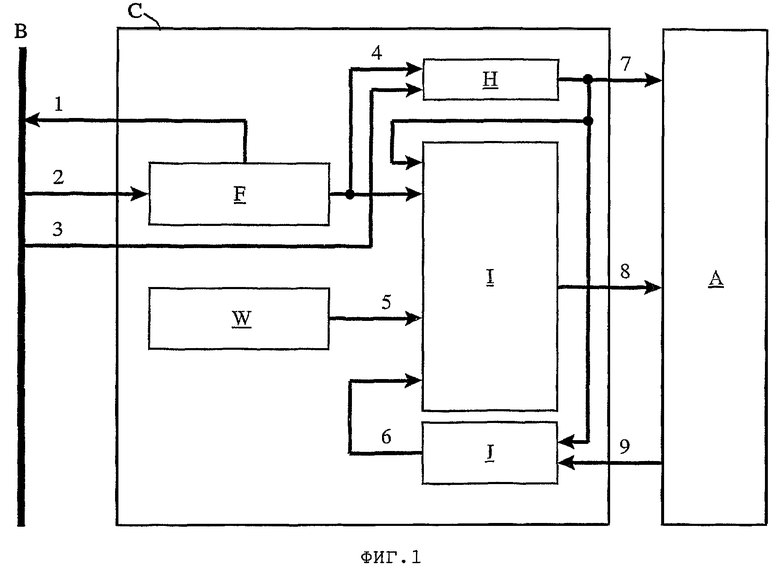
Ниже описаны системы, в которых требуются команды управления, причем такая система показана на примере самолета. Однако это не является ограничением, так как такую технологию возможно использовать во всех системах, где существуют такие же проблемы. Существует множество прикладных задач, в которых избыточные компьютеры используются для достижения высокой надежности в связи с вычислением команд управления для самолета. Одна такая прикладная задача обнаружена в связи с системой управления современным самолетом, в котором "дистанционная" система управления используется для замены механических систем, которые использовались прежде. Например, команды управления для такой системы генерируются посредством трех избыточных цифровых асинхронных первичных бортовых компьютеров (каналов), см. фиг.3. Эти три первичных бортовых компьютера 10 централизованы и формируют устройство 11 автопилот. Каждый канал имеет свой собственный набор датчиков.
Каналы могут обмениваться передаваемыми данными через внутренний цифровой канал связи в автопилоте. Каждый из каналов автопилота вычисляет одну команду управления для каждого привода 13, которые в свою очередь механически связаны с помощью поверхности управления (рулевой поверхности). Эти команды обрабатываются в мажоритарной логической схеме 14 в каждом приводе таким образом, что если одна команда управления является неправильной, то другие два канала могут вместе компенсировать ошибку, которая возникла. Этот способ, в котором более одного канала управляет одним приводом, требует, чтобы функциональный блок для решения проблемы так называемой "борьбы силы" был встроен в автопилот.
Связь между автопилотом и датчиками/приводами происходит через аналоговую или цифровую двухточечную связь.
Описанная выше централизованная система управления содержит физическое устройство, автопилот, при блокировке которого (например, в результате повреждения во время боя) прекращает функционировать вся система. Тот факт, что вся вычислительная мощность в канале сконцентрирована в одном процессоре, означает то, что нет никаких препятствий тому, чтобы любая ошибка программирования могла повлиять на систему. В тех случаях, когда передача сигналов между автопилотом и приводами/датчиками происходит с помощью аналоговых средств, задача интегрирования различных устройств является относительно сложной.
Согласно одному аспекту изобретения система управления подает команды управления приводам самолета, в которой команды управления рассчитываются в компьютерах, распределенных по самолету, в зависимости от входных сигналов, полученных от датчиков через шину данных, содержащих параметры, на основе которых вычисляются указанные команды, при этом система разработана таким образом, чтобы один компьютер размещался локально в каждом приводе, посредством чего компьютер и связанный с ним привод формируют сервоузел с цифровым интерфейсом (сопряжением) с шиной данных. Компьютер в сервоузле в соответствии с принципами управления, которые хранятся в компьютере, вычисляет команды управления для привода, расположенного в данном сервоузле, а также команды управления по меньшей мере для одного дополнительного привода в другом сервоузле. В каждом приводе в качестве команды управления для привода используется результат выбора из команд управления, причем этот выбор зависит от результата сравнения между командой управления, рассчитанной локально в сервоузле, и командой управления, рассчитанной нелокально с помощью компьютера по меньшей мере в одном дополнительном сервоузле и полученной через шину данных.
Приводы могут работать в двух режимах. Один режим, в котором они функционируют обычно, т.е. принимают те положения, для которых приходит команда, и другой режим, так называемый "отказобезопасный" режим, который в случае самолета влечет за собой то, что привод разрешает поверхности управления следовать за воздушным потоком ("свободный полет самолета"). В своем штатном режиме привод будет работать до тех пор, пока синхроимпульсы посылаются с помощью специального сигнала. Если эти импульсы исчезают, то привод переключается на отказобезопасный режим.
Компьютер сервоузла в каждом сервоузле вычисляет не только команду управления для собственного привода, но также и команды управления для одного или большего количества других сервоузлов. Нелокально рассчитанные команды управления посылают через шину данных другим сервоузлам в системе управления. Каждый сервоузел таким образом принимает некоторое количество рассчитанных вне его команд управления, предназначенных для его собственного привода. Эти рассчитанные внешне команды управления вместе с локально рассчитанными, т.е. рассчитанными внутри сервоузла, командами управления, которые рассчитываются непосредственно в сервоузле, проходят через мажоритарную логическую схему, например мажоритарную схему среднего уровня, после чего одна из команд управления выбирается в качестве команды привода и, следовательно, используется для управления приводом. Этот процесс предотвращает воздействие большинства одиночных отказов на поверхность управления. Выбранная, переданная команда управления и команда управления, рассчитанная локально в сервоузле, проверяются в блоке контроля, и они должны быть идентичны, если не происходит никаких сбоев. Если они не идентичны, то некоторые виды ошибок могут быть идентифицированы и исправлены, например, с помощью так называемого дублированного выполнения, т.е. с помощью того, что каждый сервоузел содержит множество наборов законов управления, посредством чего каждый такой набор вырабатывает собственную команду управления с помощью сервокомпьютера (компьютера сервоузла). Каждый набор принципов управления использует свой собственный набор параметров для выполнения команды управления. Выполнение различных наборов принципов управления разделено по времени, и оно происходит таким образом, что кратковременный сбой, например, во входных данных повлияет только на выполнение одного набора принципов управления. Тот из принципов управления, который выработал выходной сигнал, который совпадает с командой, посланной приводу, может считаться правильным, поскольку согласно предшествующему объяснению на привод нельзя повлиять большинством одиночных отказов. Значения переменных состояния из набора принципов управления, которые, как полагают, являются правильными, затем копируются в принцип/принципы управления, который вычислил неправильную команду управления, поэтому существует большее количество правильных наборов принципов управления, с которыми можно продолжать на следующем этапе выполнения. Другое альтернативное средство исправления сбоев состоит в том, что в каждом сервоузле существует только один набор принципов управления, но в случае ошибки значения переменных состояния из работающего без ошибок сервоузла копируются в неисправный сервоузел через шину данных.
Сервоузел также внутренне контролирует свою собственную работу с помощью, например, так называемой "сторожевой программы контроля" (СПК) известным образом. Функционирование привода проверяется посредством, например, контроля с помощью моделирования. Если ошибка обнаруживается с помощью внутреннего контроля или в приводе с помощью контроля с помощью моделирования, то приводу будет дана команда принять отказобезопасный режим, в котором импульсы больше не будут посылаться приводу. Если в компьютере сервоузла или в электронике происходит серьезная ошибка, то данный узел будет неспособен посылать синхроимпульсы, после чего привод будет снова переключен в отказобезопасный режим.
Преимущества, которые достигаются с помощью использования системы управления в соответствии с данным изобретением, состоят в том, что:
достигается более высокая устойчивость к повреждению, поскольку отсутствует централизованное и, таким образом, критичное к повреждению устройство;
стоимость технического обслуживания будет ниже по той причине, что сложное централизованное устройство заменяется множеством более простых и взаимозаменяемых устройств;
обнаружение неисправностей, автоматический контроль и интеграция устройств системы управления упрощаются, поскольку сервоузлы имеют только цифровой интерфейс с остальной частью системы.
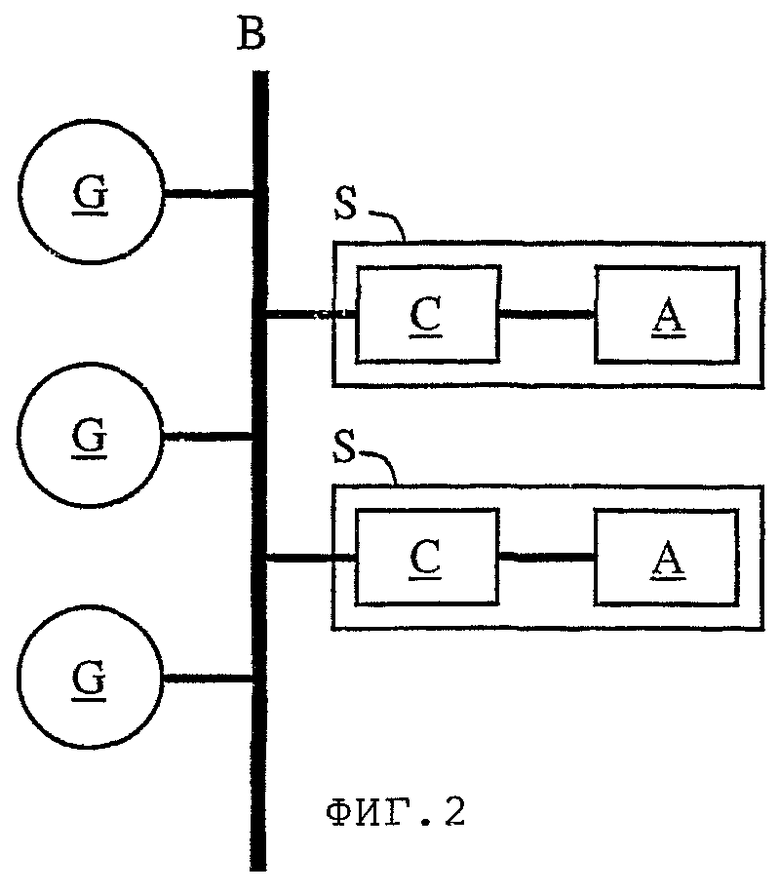
Фиг.1 показывает сервоузел в системе управления согласно изобретению и его соединения с шиной данных системы управления. Фиг.1 является просто функциональным описанием и не дает реального описания сервоузла.
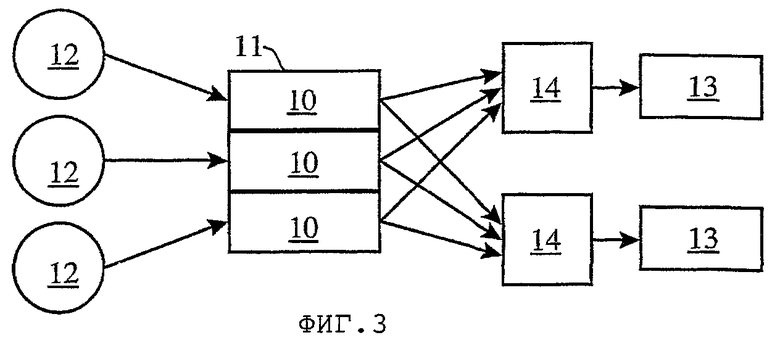
Фиг.2 обеспечивает краткий обзор структуры системы управления с распределенными компьютерами согласно изобретению, т.е. когда для каждого привода работает один компьютер.
Фиг.3 иллюстрирует систему управления согласно предшествующему уровню техники с тремя первичными компьютерами управления, размещаемыми в центре, и в которой эти компьютеры для избыточности размещаются параллельно.
Некоторое количество вариантов осуществления изобретения описано ниже со ссылкой на сопроводительные чертежи.
Фиг.2 обеспечивает краткий обзор множества приводов А, распределенных по самолету. Приводы А предназначены для выполнения маневра управления, например приведения в действие клапана или управления двигателем, электрической машиной, реле, рулевой поверхностью или другим соответствующим устройством, которое можно привести в действие. Приводы А управляются посредством компьютеров C, которые расположены в сервоузлах (S). Каждый компьютер С содержит хранящиеся в нем принципы управления для вычисления команды управления приводом узла для того сервоузла (S), к которому указанный компьютер принадлежит, и по меньшей мере для одного дополнительного привода в другом сервоузле (S). Управление приводом А определяется параметрами, которые получаются через датчики G в системе. Датчики G могут состоять из разных датчиков данных, например индикаторов скорости, температурных датчиков, датчиков давления, датчиков контроля направления движения и т.д. Параметры вышеупомянутых датчиков передаются в цифровой форме как данные через шину B данных, посредством чего все сервоузлы (S) в системе имеют доступ к одним и тем же данным датчика. Таким образом, компьютер С в каждом сервоузле (S) может вычислить, основываясь на принятых данных датчика, команду управления для привода А в его собственном сервоузле и по меньшей мере для одного привода А в другом сервоузле (S), основываясь на законах управления, запрограммированных в компьютере C.
Сервоузел в системе управления описан отдельно на фиг.1, где сервоузел содержит компьютер С, который связан с приводом A. Все данные (2) датчика посылаются компьютеру С через шину B данных. Эти данные используются согласно принципам F управления для вычисления по меньшей мере двух местных команд (4) управления согласно принципу дублированного выполнения или только одной команды (4) управления, когда дублированное выполнение больше не должно использоваться. Одна команда (1) управления рассчитывается по меньшей мере для одного дополнительного привода в другом сервоузле (S). Команда/команды (4) управления, рассчитанная локально сервоузлом для себя, обрабатывается с помощью мажоритарной выборки вместе с множеством нелокально рассчитанных команд (3) управления для данного привода А в блоке H мажоритарной выборки, например в "мажоритарной схеме среднего уровня". Результирующая команда (7) управления используется для управления приводом A. Эта выбранная команда (7) привода и местная команда/команды (4) управления контролируются с помощью функционального блока контроля I. Если локально рассчитанная команда/команды (4) управления совершенно не согласовывается с командой (7) привода, то выполняется одно из следующих действий:
- если используется дублированное выполнение определяют, какая из местных команд (4) управления является правильной. Переменные состояния из набора принципов управления для правильной команды управления копируются в наборы принципов управления, которые вычислили неправильную команду управления;
- если дублированное выполнение не используется, переменные состояния копируются из правильно функционирующего сервоузла (S) в работающий со сбоями сервоузел (S) через шину данных.
В любом случае, на следующем этапе выполнения получается правильная местная команда/команды (4) управления, предполагая, что не происходит никаких сбоев. Если по какой-то причине невозможно справиться со сбоями, то в качестве первой возможности для управления приводом A могут использоваться команды (3) управления, рассчитанные в другом сервоузле. Если это также невозможно, то привод А устанавливается в отказобезопасный режим, так как прекращается подача сигналов синхронизации. Функциональный блок I контроля также прекращает подачу сигналов (8) синхронизации, если программа W внутреннего контроля обнаружила в компьютере какие-либо ошибки. Программа W внутреннего контроля разработана таким образом, что она способна с высокой вероятностью обнаружить, что компьютер С функционирует неправильно. Такой контроль может быть реализован, используя "сторожевую программу контроля" известным образом. Функциональный блок I контроля также прекращает подачу сигналов (8) синхронизации, если функциональный блок J контроля привода обнаружит, что привод ведет себя не так, как ожидалось. Это может быть реализовано с помощью так называемого "контроля с помощью моделирования" известным образом, основываясь на командах приводу и некоторых параметрах (9), полученных от привода.
Другие сервоузлы (S) в системе управления функционируют вышеописанным образом. Сигналы, которыми обмениваются соответствующие сервокомпьютеры, являются цифровыми. Различные сервоузлы (S) работают синхронно.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДАМИ МНОГОСЕКЦИОННОГО РУЛЯ САМОЛЕТА | 2023 |
|
RU2811754C1 |
| АВТОПИЛОТ ДЛЯ САМОЛЕТОВ МАЛОЙ АВИАЦИИ | 2024 |
|
RU2832351C1 |
| САМОЛЕТ С СИСТЕМОЙ УВЕЛИЧЕНИЯ ПОДЪЕМНОЙ СИЛЫ | 2010 |
|
RU2494931C2 |
| Отказобезопасная электромеханическая система управления реверсивным устройством газотурбинного двигателя | 2020 |
|
RU2744587C1 |
| ТОРМОЗНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2587665C1 |
| КОМПЛЕКС ЭЛЕКТРООБОРУДОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ И ЗАЩИТЫ ЯДЕРНЫХ РЕАКТОРОВ | 2014 |
|
RU2574289C2 |
| СИСТЕМА ЛОГИЧЕСКОГО УПРАВЛЕНИЯ (ВАРИАНТЫ) | 2012 |
|
RU2574837C2 |
| Интегрированная судовая видеосистема | 2020 |
|
RU2760365C1 |
| АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ САМОЛЕТОМ В СЛУЧАЕ НЕДЕЕСПОСОБНОСТИ ЭКИПАЖА | 2011 |
|
RU2612549C2 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |
Изобретение относится к устройству и способу выработки команд управления приводами самолета. Технический результат заключается в повышении надежности управления приводами самолета. Система содержит компьютер, размещенный в каждом соответствующем локальном приводе и образующий вместе с приводом сервоузел, причем компьютер принимает входные сигналы через шину данных, посредством чего в каждом сервоузле вычисляет команды управления локальным приводом на основании одного или большего количества наборов принципов управления в зависимости от принятых параметров, а также вычисляет команды управления по меньшей мере для одного дополнительного привода в другом сервоузле, причем результат выбора команд управления используется в качестве команды управления приводом локально в каждом сервоузле в зависимости от результата сравнения между командами управления, рассчитанными локально в сервоузле, и командой управления, рассчитанной для привода по меньшей мере в одном другом сервоузле. 13 з. п. ф-лы, 3 ил.
| US 4672530 A, 09.06.1987.US 4622667 A, 11.11.1986.DE 3906846 A, 06.09.1990.RU 2126528 C1, 20.02.1999. |

