Изобретение относится к области безопасности полетов и, в частности, к способам определения безопасных траекторий движения летательных аппаратов (ЛА) - самолетов и вертолетов над местностью со сложным рельефом и может использоваться для ЛА различных типов, в том числе для ЛА, обладающих способностью, как и вертолеты, к вертикальному взлету и зависанию - автожиров, гирокоптеров и др.
Известны способы предупреждения столкновения ЛА с рельефом местности, в которых определяют местоположение ЛА с помощью навигационной системы, производят определение параметров текущего динамического состояния, экстраполируют упомянутые параметры текущего динамического состояния на заданный временной интервал, вычисляют прогнозируемую траекторию, сопоставляют ее с рельефом местности и предупреждают об опасности столкновения. При этом предупреждение об опасности столкновения осуществляется, как правило, с помощью формирования в направлении полета защитного пространства с аварийной сигнальной областью. Информирование экипажа о наличии опасного рельефа производится в два этапа: в случае пересечения рельефа защитным пространством вне аварийной сигнальной области (предупреждающая сигнализация) и в случае пересечения рельефа аварийной сигнальной областью (аварийная сигнализация). Данные способы рассмотрены как для самолетов [1-3], так и для вертолетов и подобных им ЛА [4, 5]. В дальнейшем, упоминая о вертолетах, будем иметь в виду все ЛА, способные к вертикальному взлету и зависанию.
Известны способы предупреждения столкновения, основанные на выходе из опасной ситуации путем оценки возможности вертикального маневра [6], а при отрицательном результате такой оценки - путем определения направления разворота [7]. Для ЛА вертолетного типа рассматривается также выход из опасной ситуации путем зависания [8].
Для всех упомянутых выше способов характерна недостаточная надежность предотвращения столкновений ЛА с рельефом, так как они не предусматривают ситуации, когда при обнаружении опасного рельефа по курсу и невозможности обойти его путем набора высоты ЛА вынужден будет произвести разворот на обратный курс, что может оказаться невозможным при полетах в районах с горным рельефом, при выполнении захода на посадку или взлете с горного аэродрома, полете в каньонах и т.п.
Возможность для вертолетов уменьшить величину путевой скорости вплоть до нуля (до зависания) приведет к увеличению времени выполнения полетного задания, что порой неприемлемо.
В связи с этим за прототип заявляемого изобретения выбирается способ, в котором предварительно сообщается о невозможности разворота на обратный курс при данных параметрах текущего динамического состояния ЛА [9]. Этот способ применим как для самолетов, так и для вертолетов.
Он характеризуется тем, что определяют местоположение летательного аппарата с помощью навигационной системы, производят определение параметров текущего динамического состояния, вычисляют прогнозируемую траекторию, при этом непрерывно вычисляют на основе параметров текущего динамического состояния минимально допустимые радиусы разворота, затем прогнозируют упомянутые радиусы разворота на время определения опасного рельефа, а далее путем сканирования пространства прогнозируемой траекторией формируют безопасный коридор, границы которого определяют с учетом возможности разворота летательного аппарата на обратный курс в соответствии с прогнозируемыми значениями минимально допустимых радиусов разворота, определяют опасный рельеф на основании сопоставления упомянутого безопасного коридора с рельефом местности и предупреждают о наличии потенциально опасного рельефа. Ширину безопасного коридора и минимально допустимые радиусы разворота определяют по формулам, приведенным в [9].
Однако надежность упомянутого способа [9] ограничивается тем, что в условиях, когда получено уведомление о пересечении безопасного коридора с рельефом местности, пилот должен самостоятельно оценить степень опасности и определить необходимость и характер маневрирования для выхода из опасной ситуации. Это приводит к значительному увеличению психофизической нагрузки пилота, что может привести к принятию ошибочного решения.
Аналогичные недостатки характерны для устройства-прототипа, функционирующего на основании упомянутого способа-прототипа [9].
Устройство-прототип содержит навигационную систему, обнаружитель препятствий в прогнозируемом полете, устройство сигнализации, видеогенератор и дисплей на его выходе, при этом обнаружитель препятствий в прогнозируемом полете включает вычислитель параметров текущего динамического состояния, определитель координат, вычислитель прогнозируемой траектории и компаратор, выход навигационной системы подключен к входам вычислителя параметров текущего динамического состояния и определителя координат, выходы которых соответственно подключены к первому и второму входам вычислителя прогнозируемой траектории, третий вход которого соединен с базой аэронавигационной информации, первый и второй входы компаратора соединены соответственно с блоком управления и базой данных рельефа, первый и второй выходы компаратора соответственно соединены с входом устройства сигнализации и первым входом видеогенератора, второй и третий входы которого соответственно соединены с базой аэронавигационной информации и выходом определителя координат, а также содержит вычислитель минимально допустимых радиусов разворота, вычислитель прогнозируемых минимально допустимых радиусов разворота, формирователь безопасного коридора и сканирующий узел компаратора, при этом вход вычислителя минимально допустимых радиусов разворота соединен с выходом вычислителя параметров текущего динамического состояния, а его выход соединен с первым входом формирователя безопасного коридора, второй вход которого соединен с выходом вычислителя прогнозируемых минимально допустимых радиусов разворота, а его третий вход соединен с выходом вычислителя прогнозируемой траектории, выполненного с дополнительным выходом, который соединен с входом вычислителя прогнозируемых минимально допустимых радиусов разворота, при этом выход формирователя безопасного коридора соединен с третьим входом компаратора и входом сканирующего узла компаратора, выход которого соединен с четвертым входом компаратора, а четвертый вход видеогенератора соединен с выходом вычислителя прогнозируемой траектории.
Предусмотрен вариант устройства-прототипа с введением узла памяти пройденной траектории, вход которого соединен с выходом определителя координат, а выход - с пятым входом видеогенератора.
Задачей заявляемого изобретения является повышение безопасности полетов путем анализа пространства внутри безопасного коридора и в случае необходимости за его пределами и выдача пилоту рекомендаций о возможных действиях по выходу из опасной ситуации.
Рельеф местности, пересекающийся с безопасным коридором, определим как потенциально опасный рельеф.
Задача решается следующим образом.
Суть заявляемого способа предупреждения столкновения самолетов и вертолетов с рельефом местности состоит в том, что определяют местоположение летательного аппарата с помощью навигационной системы, производят определение параметров текущего динамического состояния, вычисляют прогнозируемую траекторию, при этом непрерывно вычисляют на основе параметров текущего динамического состояния минимально допустимые радиусы разворота, затем прогнозируют упомянутые радиусы разворота на время определения потенциально опасного рельефа, а далее путем сканирования пространства прогнозируемой траекторией формируют безопасный коридор, границы которого определяют с учетом возможности разворота летательного аппарата на обратный курс в соответствии с прогнозируемыми значениями минимально допустимых радиусов разворота, определяют потенциально опасный рельеф сопоставлением упомянутого безопасного коридора с рельефом местности и предупреждают о наличии потенциально опасного рельефа, при этом внутри безопасного коридора формируют защитное пространство с аварийной сигнальной областью прогнозируют аварийную сигнальную область на длину безопасного коридора, причем в случае пересечения рельефа местности безопасным коридором по обе стороны от прогнозируемой траектории, а также в случае пересечения рельефа местности безопасным коридором по одну сторону от прогнозируемой траектории и одновременно прогнозируемой аварийной сигнальной областью, производят исследование пространства путем вариаций параметров безопасного коридора и соответствующей прогнозируемой траектории последовательным перебором возможных изменений траекторного угла, допустимых радиусов разворота в диапазонах возможных изменений величины путевой скорости и направления бокового маневрирования, определяют безопасные варианты изменения параметров полета и соответствующие им маневры летательного аппарата, упомянутые маневры летательного аппарата отображают в удобной для пилота форме для выбора наиболее эффективного из них по условиям полета.
Предлагаются формулы, определяющие длину части безопасного коридора, расположенной в направлении полета, и длину аварийной сигнальной области.
Предлагается устройство, функционирующее на основе заявляемого способа. Для упрощения описания заявляемого устройства произведем объединение ряда блоков устройства-прототипа, входящих в состав заявляемого устройства.
Заявляемое устройство предупреждения столкновения самолетов и вертолетов с рельефом местности содержит навигационную систему (НС), обнаружитель препятствий в прогнозируемом полете (ОП ПП), блок управления (БУ), базу данных рельефа (БДР), устройство сигнализации (УС), видеогенератор и дисплей на выходе видеогенератора, формирователь безопасного коридора прогнозируемого полета (ФБК ПП), узел памяти (УП) и базу аэронавигационной информации (БАИ), при этом выходы НС, БУ и БДР соединены, соответственно, с первым, вторым и третьим входами ОП ПП, четвертый и пятый входы которого соединены, соответственно, с выходами ФБК ПП и БАИ, первый, второй и третий выходы ОП ПП подключены, соответственно, к первому, второму и третьему входам ФБК ПП, четвертый и пятый выходы упомянутого ОП ПП подключены, соответственно, ко входу УС и первому входу видеогенератора, а шестой выход ОП ПП подключен ко входу УП и третьему входу видеогенератора, второй и четвертый входы которого подключены, соответственно, к выходу БАИ и третьему выходу ОП ПП, а выход подключен ко входу дисплея, выход УП подключен к пятому входу видеогенератора, при этом дополнительно введены блок формирования и прогнозирования защитного пространства (БФП ЗП), блок анализа (БА), обнаружитель препятствий в вариантах прогнозируемого полета (ОП ВПП), формирователь безопасных коридоров вариантов прогнозируемого полета (ФБК ВПП), определитель безопасных маневров (ОБМ) и матричная панель отображения безопасных маневров (МП), при этом вход БФП ЗП подключен к четвертому выходу ОП ПП, а выход подключен ко входу БА, выход которого подключен к первому входу ОП ВПП, второй вход которого соединен с выходом БАИ, а третий, четвертый и пятый входы соединены, соответственно, с выходом БДР, выходом НС и первым выходом ФБК ВПП, первый и второй выходы ОП ВПП соединены, соответственно, со входом ФБК ВПП и первым входом ОБМ, второй вход которого соединен со вторым выходом ФБК ВПП, а выход ОБМ соединен со входом МП.
Работа способа поясняется с помощью фиг.1-5. Работа устройства поясняется с помощью фиг.6. На фиг.1-6 представлены:
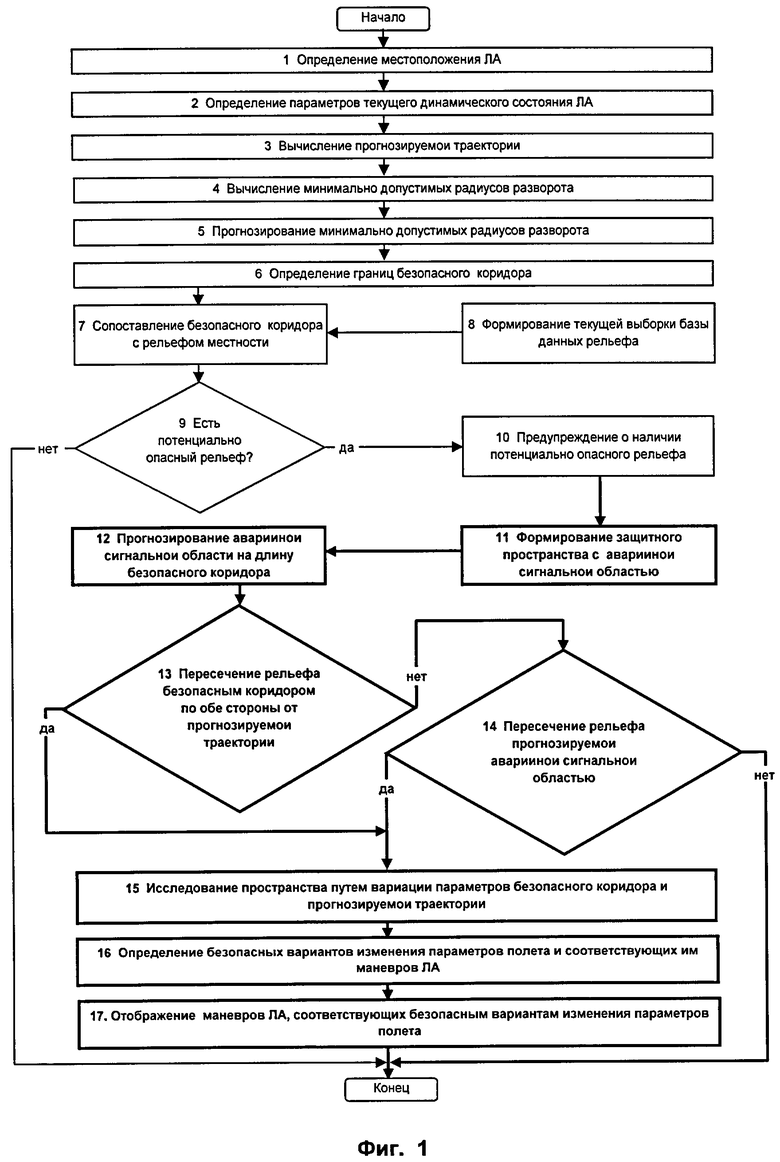
Фиг.1 - Алгоритм последовательности действий, реализующий заявляемый способ.
Фиг.2 - Плановые проекции безопасного коридора, прогнозируемой траектории, защитного пространства и аварийной сигнальной области.
Фиг.3 - Профильные проекции безопасного коридора, прогнозируемой траектории, защитного пространства и аварийной сигнальной области.
Фиг.4 - Вид матричной панели отображения безопасных маневров, рекомендуемых пилоту самолета для обхода опасного рельефа.
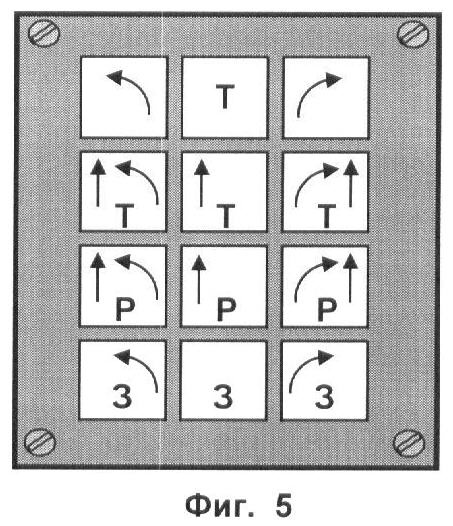
Фиг.5 - Вид матричной панели безопасных маневров, рекомендуемых пилоту вертолета для обхода опасного рельефа.
Фиг.6 - Блок-схема заявляемого устройства.
Заявляемый способ реализуется следующей последовательностью действий (см. фиг.1).
Аналогично способу-прототипу [9] с помощью навигационной системы производят определение местоположения ЛА 1, определение параметров текущего динамического состояния ЛА (путевой скорости - Wп, вертикальной скорости - Wу, путевого угла - ПУ, скорости разворота - ωу и др.) 2, по которым производят экстраполяцию местоположения ЛА на заданный временной интервал (Тп) и вычисление прогнозируемой траектории 3. Далее непрерывно производят вычисление минимально допустимых радиусов разворота (как вправо, так и влево от прогнозируемой траектории) на основе параметров динамического состояния 4, затем производят вычисление прогнозируемых (на время определения опасного рельефа) радиусов разворота на основе вычисленных прогнозируемых динамических параметров ЛА 5, определяют границы безопасного коридора (БК) 6, внутри которого должна быть расположена прогнозируемая траектория. Границы БК определяются с учетом возможности разворота ЛА на обратный курс в соответствии с прогнозируемыми минимально допустимыми радиусами разворота. При этом сопоставление БК с рельефом местности 7 (в пределах предварительно сформированной выборки из базы данных о рельефе 8) производят путем сканирования пространства в пределах БК. В случае пересечения части рельефа местности с БК 9 производят формирование предупреждения о наличии потенциально опасного рельефа 10.
Однако далее, в отличие от прототипа, при обнаружении потенциально опасного рельефа производится формирование защитного пространства с аварийной сигнальной областью 11 и прогнозирование аварийной сигнальной области на длину БК 12, затем, как в случае пересечения БК рельефа местности по обе стороны от прогнозируемой траектории, так и в случае пересечения рельефа местности по одну сторону от прогнозируемой траектории 13 («нет») и одновременно прогнозируемой аварийной сигнальной областью 14 («да») производится исследование пространства путем вариации параметров безопасного коридора и прогнозируемой траектории 15. На основе упомянутого исследования пространства определяют безопасные варианты изменения параметров полета и соответствующие им маневры ЛА. Маневры ЛА, соответствующие безопасным вариантам изменения параметров полета, отображают в удобной для пилота форме 16.
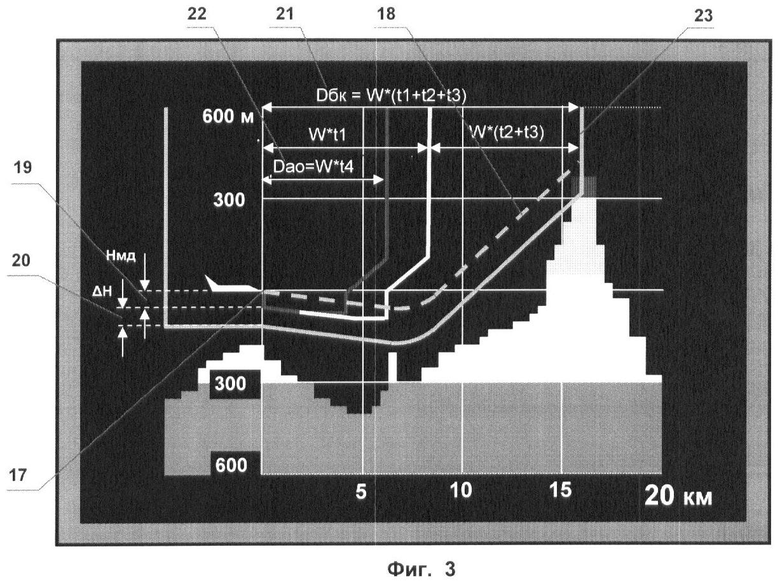
БК на фиг.2 и 3 представлен соответственно в виде плановой и профильной проекций пространственной области, связанной непосредственно с текущим местоположением ЛА 17 и определяемой (по форме и ориентации в пространстве) прогнозируемой траекторией 18. Зависимость параметров БК от параметров движения ЛА (текущих и прогнозируемых минимально допустимых радиусов разворота, максимальной ошибки определения местоположения ЛА, минимально безопасного бокового расстояния ЛА от рельефа местности, путевой скорости, вертикальной скорости, путевого угла, угловой скорости разворота, минимально допустимой высоты полета Нмд 19 и дополнительного запаса высоты ΔН 20) подробно описана в [9].
Длину части безопасного коридора, расположенной в направлении полета, Dбк (21 на фиг.3) можно определить как произведение путевой скорости ЛА на время полета до переднего фронта БК. Упомянутое время полета представляет собой сумму трех характерных временных отрезков

Где
W - путевая скорость ЛА,
t1 - максимально возможное время полета до препятствия, определяемое длиной защитного пространства,
t2 - время, необходимое пилоту для принятия решения о необходимости дополнительного маневрирования,
t3 - время, необходимое для изменения текущих параметров полета на параметры, требуемые для выполнения выбранного маневра.
Длина аварийной сигнальной области Dao (22 на фиг.3) определяется по выражению

где t4 - максимально возможное время полета до препятствия, определяемое длиной аварийной сигнальной области.
Пересчет конфигурации границ безопасного коридора 23 осуществляется с темпом, необходимым для обновления информации, и, таким образом, безопасный коридор 24 с шириной L формируется адаптированным к текущему динамическому состоянию ЛА, к этапу и режиму выполняемого полета.
При обнаружении потенциально опасного рельефа формируется соответствующее уведомление об этом и в упомянутых выше случаях, требующих исследования пространства, определения безопасных траекторий и необходимых для их реализации маневров ЛА, производится отображение упомянутых маневров на матричной панели (фиг.4).
Пример отображения рекомендуемых маневров, показанный на фиг.4, предполагает отображение на матричной панели информации для пилота самолета таким образом, что каждый элемент соответствует одному из возможных вариантов маневрирования по уходу от потенциально опасного рельефа. На элементах левого столбца панели отображают маневры с выполнением левого разворота (обозначается на элементе панели дугой со стрелкой, указывающей направление разворота против часовой стрелки), на элементах центрального столбца панели отображают маневры с прямолинейным движением, а на элементах правого столбца панели отображают маневры с выполнением правого разворота (обозначается на элементе панели дугой со стрелкой, указывающей направление разворота по часовой стрелке), при этом на первом и третьем элементах первой строки матричной панели отображаются маневры, выполняемые без торможения, а на втором элементе - с торможением (обозначается «Т»), на элементах второй строки отображаются маневры, выполняемые с набором высоты (обозначается стрелкой, направленной вверх) и торможением, а на элементах третьей строки отображаются маневры с набором высоты и увеличением мощности двигателя (обозначается «Р»).
Пилот, используя упомянутую матричную панель, имеет возможность выбрать маневр, наиболее подходящий для выполнения решаемой задачи полета, с учетом текущих условий ее решения. Такой прием существенно облегчает пилоту задачу принятия решения в сложившейся ситуации, так как позволяет оценить степень опасности сближения с рельефом до возникновения опасной ситуации, не требует для этого профилактического просмотра отображения рельефа, упрощает поиск безопасного маневра ухода от потенциально опасного рельефа и снижает психологическую нагрузку экипажа. Таким образом, оказывается возможным избежать создания опасной ситуации на борту путем своевременного маневрирования, выполненного на основании сформированной сигнализации о потенциально опасном рельефе и с использованием индикации возможных безопасных маневров по обходу потенциально опасного рельефа.
Пример отображения рекомендуемых маневров, показанный на фиг.5, предполагает отображение на матричной панели информации для пилота вертолета. В отличие от панели, показанной на фиг.4, панель, показанная на фиг.5, имеем дополнительную строку для отображения рекомендуемых маневров, заканчивающихся зависанием ЛА (обозначается «З»). При этом отображение на первых трех строках аналогично отображению, формируемому для пилота самолета на фиг.4.
Одним из вариантов устройства, реализующего заявленный способ, является устройство, блок-схема которого представлена на фиг.6.
На фиг.6 устройство предупреждения столкновения самолетов и вертолетов с рельефом местности содержит НС 25, ОП ПП 26, БУ 27, БДР 28, УС 29, видеогенератор 30 и дисплей 31 на выходе видеогенератора 30, ФБК ПП 32, УП 33 и БАИ 34, при этом выходы НС 25, БУ 27 и БДР 28 соединены, соответственно, с первым, вторым и третьим входами ОП ПП 26, четвертый и пятый входы которого соединены, соответственно, с выходами ФБК ПП 32 и БАИ 34, первый, второй и третий выходы ОП ПП 26 подключены, соответственно, к первому, второму и третьему входам ФБК ПП 32, четвертый и пятый выходы упомянутого ОП ПП 26 подключены, соответственно, ко входу УС 29 и первому входу видеогенератора 30, а шестой выход ОП ПП 26 подключен ко входу УП 33 и третьему входу видеогенератора 30, второй и четвертый входы которого подключены, соответственно, к выходу БАИ 34 и третьему выходу ОП ПП 26, а выход подключен ко входу дисплея 31, выход УП 33 подключен к пятому входу видеогенератора 30, при этом дополнительно введены БФП ЗП 35, БА 36, ОП ВПП 37, ФБК ВПП 38, ОБМ 39 и МП 40, при этом вход БФП ЗП 35 подключен к четвертому выходу ОП ПП 26, а выход подключен ко входу БА 36, выход которого подключен к первому входу ОП ВПП 37, второй вход которого соединен с выходом БАИ 34, а третий, четвертый и пятый входы соединены, соответственно, с выходом БДР 28, выходом НС 25 и первым выходом ФБК ВПП 38, первый и второй выходы ОП ВПП 37 соединены, соответственно, со входом ФБК ВПП 38 и первым входом ОБМ 39, второй вход которого соединен со вторым выходом ФБК ВПП 38, а выход ОБМ 39 соединен со входом МП 40.
Заявляемое устройство работает следующим образом: ОП ПП 26 по информации, поступающей на его входы с выходов НС 25, БДР 28, БУ 27, ФБК ПП 32 и БАИ 34 выполняет следующие функции, аналогичные прототипу: определяет координаты ЛА, вычисляет параметры текущего динамического состояния ЛА, вычисляет прогнозируемую траекторию, определяет наличие пересечения пространства элементов базы данных рельефа с БК, формируемого в ФБК ПП 32 по информации о параметрах текущего динамического состояния ЛА, параметрах прогнозируемого динамического состояния и прогнозируемой траектории с вертикальным обходом рельефа, поступающей соответственно с первого, второго и третьего выходов ОП ПП 26. При наличии пересечения БК с рельефом (когда при сравнении БК с элементами рельефа обнаруживается пространство, принадлежащее как БК, так и пространству базы данных рельефа) на четвертом выходе ОП ПП 26 вырабатываются сигналы, поступающие на вход УС 29, уведомляющего об опасности, а с третьего и пятого выходов ОП ПП 26, соответственно, на четвертый и первый входы видеогенератора 30 поступает информация для последующего отображения на дисплее 31 прогнозируемой траектории и текстов уведомлений об опасном рельефе, при этом на второй и третий входы видеогенератора 30 поступает, соответственно, информация с выхода БАИ 34 о параметрах и координатах взлетно-посадочных полос и с шестого выхода ОП ПП 26 о текущих координатах ЛА. Для анализа экипажем текущих динамических возможностей ЛА по выполнению маневрирования на дисплее 31 отображается участок пройденной траектории, ограниченный выбранным масштабом экрана, для чего в состав устройства входит УП 33, с выхода которого информация о запомненных координатах пройденной траектории поступает через видеогенератор 30 для отображения на дисплее 31.
Сигналы, поступающие на второй вход ОП ПП 26 с выхода БУ 27, позволяют производить отключение сигнализации.
В отличие от устройства-прототипа использование заявляемого устройства не только позволяет вовремя информировать летчика о потенциально опасном рельефе, но и с помощью дополнительно введенных в его состав блоков оценить степень опасности рельефа и при необходимости отобразить рекомендуемые маневры по обходу потенциально опасного рельефа. При обнаружении потенциально опасного рельефа в прогнозируемом полете с выхода ОП ПП 26 на вход БФП ЗП 35 поступает сигнал, в БФП ЗП 35 формируют внутри БК защитное пространство с аварийной сигнальной областью, прогнозируют аварийную сигнальную область на длину БК, после чего в БА 36 производят анализ характера пересечения с рельефом местности БК и прогнозируемой аварийной сигнальной области, причем в случае пересечения рельефа БК по обе стороны от прогнозируемой траектории, а также в случае пересечения рельефа БК по одну сторону от прогнозируемой траектории и одновременно прогнозируемой аварийной сигнальной областью, с выхода БА 36 на первый вход ОП ВПП 37 поступает управляющий сигнал, по получении которого в ОП ВПП 37 и ФБК ВПП 38 (подобно тому, как в ОП ПП 26 и ФБК ПП 32 для прогнозируемого полета, и с учетом, что состав информации, поступающий с первого выхода ОП ВПП 37 на вход ФБК ВПП 38, соответствует составу информации, поступающей с первого, второго и третьего выходов ОП ПП 26 соответственно на первый, второй и третий входы ФБК ПП 32) с использованием информации о параметрах полета ЛА, поступающей с выхода НС 25 на четвертый вход ОП ВИН 37, информации о рельефе, поступающей с выхода БДР 28 на третий вход ОП ВПП 37, информации об аэродромах, поступающей с выхода БАИ 34, производят исследование пространства путем вариаций параметров БК и соответствующей прогнозируемой траектории последовательным перебором возможных изменений траекторного угла, допустимых радиусов разворота в диапазоне возможного изменения величины путевой скорости и направлений бокового маневрирования определяют безопасные варианты изменения параметров полета (по отсутствию информации о потенциально опасном рельефе, поступающей со второго выхода ОП ВПП 37 на первый вход ОБМ 39), затем определяют в ОБМ 39 маневры летательного аппарата, соответствующие безопасным вариантам изменения параметров полета, информация о которых поступает на второй вход ОБМ 39 со второго выхода ФБК ВПП 38 при отсутствии сигнала на втором выходе ОП ВПП 37, далее по информации об определенных маневрах, поступающей с выхода ОБМ 39 на вход МП 40, упомянутые маневры летательного аппарата отображают на МП 40, чтобы пилот мог выбрать наиболее эффективный из них (по текущим условиям полета) для обхода потенциально опасного рельефа. Пример отображения на МП 40 безопасных маневров приведен на фиг.4 и 5.
Если в результате анализа степени опасности рельефа, произведенного в БА 36, управляющий сигнал на выходе БА 36 не будет сформирован, т.е. рельеф, пересечение которого с БК было обнаружено и проанализировано, будет признан неопасным, работа устройства будет продолжена без задействования блоков ОП ВПП 37, ФБК ВПП 38, ОБМ 39 и МП 40. При этом на МП 40 не будет отображаться никаких рекомендуемых маневров.
Таким образом, рассмотренный выше способ и устройство на его основе существенно облегчают пилоту задачу оценки степени опасности рельефа и принятия своевременного и правильного решения о необходимости и характере маневрирования.
Заявляемый способ и устройство на его основе позволяют реализовать новые преимущества систем предупреждения столкновения ЛА с землей:
- уведомить об опасном сближении с рельефом за время, достаточное для выбора рекомендуемого маневра ухода без превышения допустимых перегрузок, включая разворот на обратный курс, а также маневр зависания для ЛА, способных его выполнять;
- повысить информированность экипажа о степени опасности рельефа путем наличия или отсутствия отображения рекомендуемых маневров;
- упростить экипажу задачу выбора необходимого маневра по обходу потенциально опасного рельефа путем отображения на матричной панели рекомендуемых маневров.
Реализация перечисленных преимуществ позволяет повысить надежность определения потенциально опасного рельефа благодаря более детальному анализу опасности взаимного расположения ЛА и рельефа, упростить летчику задачу определения необходимости и характера маневрирования, а также повысить эргономичность представления информации экипажу путем отображения рекомендуемых маневров.
Предложенный способ и его варианты полностью реализуются в устройстве, выполненном в соответствии с фиг.6.
Блоки и устройства, представленные на фиг.6, реализуются с использованием аппаратно-программных модулей, построенных на базе широко распространенных стандартных устройств аналоговой и цифровой вычислительной техники.
Для разработки программного обеспечения, реализующего необходимые функции упомянутых устройств, использовались стандартные языки программирования («С», «C++»), программно-математическое обеспечение фирм «MICROSOFT», «BORLAND» и известные формулы геодезических преобразований [11].
Блоки 26, 32, 33, 35-39 реализованы на базе интегрированного модуля фирмы «AMPRO» с процессорным модулем фирмы «ANALOG MICRODEVICSES», работающего от источника питания фирмы «АЛЕКСАНДЕР ЭЛЕКТРИК». В указанных блоках также используются интерфейсные микросхемы фирмы «ANALOG DEVICES» и прецизионные программируемые усилители фирмы «TEXAS INSTRUMENTS».
Блок 29 реализован на базе аналоговых звуковых кодеров и декодеров фирмы «TEXAS INSTRUMENTS», операционных усилителей фирмы «MAXIM» и программируемых логических интегральных схем фирмы «ALTERA».
Блок 30 реализован на базе видеоконтроллера фирмы «SHARP», видеоусилителей фирмы «MAXIM», и высоковольтных преобразователей фирмы «TDK».
Блоки 31 и 40 реализованы на базе жидкокристаллической матрицы фирмы «SHARP».
Блоки 28 и 34 реализованы на базе постоянных запоминающих устройств «DiskOnChip» фирмы «M-SYSTEMS».
Блок 27 реализован на базе переключателей фирмы «BOURNS», соединителей фирмы «MOLEX», преобразователей напряжений фирмы «MAXIM».
Математическое моделирование, полунатурные и летные испытания системы СРПБЗ, в которой реализован заявляемый способ, показывают, что вероятности аварийных летных ситуаций по сравнению с прототипом снижается на 20-30%.
Проведенные летные испытания на самолетах типа Ту-154, Ту-204, Ту-214, Ту-334, Як-40, Як-42, Ил-76, Ил-86, Бе-200 и вертолетах типа Ми-8, Ми-26 показали эффективность использования заявляемого устройства.
Таким образом, заявляемое изобретение чрезвычайно перспективно для использования на ЛА с целью повышения безопасности полетов.
Литературные источники
1. Патент Франции №2731824, кл. G08G 5/04, заявл. 17.03.1995 г., опубл. 20.09.1998 г.
2. Патент Франции №2747492, кл. G08G 5/04, заявл. 15.04.1996 г., опубл. 17.10.1997 г.
3. Патент Франции №2773609, кл. G01C 5/00, заявл. 12.01.1998 г., опубл. 16.07.1999 г.
4. Патент Россия №2312787, кл. B64D 45/04, заявл. 25.11.2004 г., опубл. 20.12.2007 г.
5. Заявка США №2006290531, кл. G08G 5/54, опубл. 28.12.2006 г.
6. Патент России №2262746, кл. G08G 5/04, заявл. 10.06.2004 г., опубл. 20.10.2005 г.
7. Патент России №2271039, кл. G08G 5/04, B64D 45/04 заявл. 24.03.2005 г., опубл. 27.02.2006 г.
8. Патент США №6906641, кл. G08B 21/00, заявл. 25.05.2001 г., опубл. 14.06.2005 г.
9. Патент России №2301456, кл. G08G 5/06, заявл. 24.04.2006 г., опубл. 20.06.2007 г. (Международная заявка РСТ WO 2007/123438 опубл. 01.11.2007 г.)
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С РЕЛЬЕФОМ МЕСТНОСТИ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2006 |
|
RU2301456C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2004 |
|
RU2262746C1 |
| СИСТЕМА УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В РЕЖИМЕ УВОДА С ОПАСНОЙ ВЫСОТЫ ПРИ РАБОТЕ ПО НАЗЕМНЫМ ОБЪЕКТАМ | 2016 |
|
RU2644048C2 |
| СПОСОБ ОЦЕНКИ БЛИЗОСТИ ТРАЕКТОРИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ К ЗЕМНОЙ ПОВЕРХНОСТИ | 2008 |
|
RU2388059C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2007 |
|
RU2356099C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ВЕРТОЛЕТА С НАЗЕМНЫМИ ПРЕПЯТСТВИЯМИ | 2009 |
|
RU2397549C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 2005 |
|
RU2271039C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ВОЗДУШНОГО СУДНА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2005 |
|
RU2297047C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ ТРАЕКТОРИИ ВЗЛЕТА И ПРОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА НАД ВЫСОТНЫМ ПРЕПЯТСТВИЕМ | 2022 |
|
RU2798591C1 |



Группа изобретений относится к технике обеспечения безопасных полетов самолетов и вертолетов. Особенностью способа является то, что внутри безопасного коридора формируют защитное пространство с аварийной сигнальной областью и прогнозируют аварийную сигнальную область на длину безопасного коридора. В случае пересечения рельефа местности безопасным коридором по обе стороны от прогнозируемой траектории, а также в случае пересечения рельефа местности безопасным коридором по одну сторону от прогнозируемой траектории и одновременно прогнозируемой аварийной сигнальной областью производят исследование пространства путем вариаций параметров безопасного коридора и соответствующей прогнозируемой траектории. Определяют безопасные варианты изменения параметров полета и соответствующие им маневры ЛА, которые отображают в удобной для пилота форме для выбора наиболее эффективного из них по условиям полета. Особенностью устройства является введение в него блока формирования и прогнозирования защитного пространства, блока анализа, обнаружителя препятствий в вариантах прогнозируемого полета ЛА, формирователя безопасных коридоров вариантов прогнозируемого полета, определителя безопасных маневров и матричной панели отображения безопасных маневров. В соответствии с группой изобретений анализируется пространство внутри безопасного коридора и при необходимости за его пределами, а пилоту выдаются рекомендации о возможных маневрах по выходу из опасной ситуации. Это позволяет повысить безопасность полетов. 2 н. и 4 з.п. ф-лы, 6 ил.
1. Способ предупреждения столкновения самолетов и вертолетов с рельефом местности, по которому определяют местоположение летательного аппарата (ЛА) с помощью навигационной системы, производят определение параметров текущего динамического состояния, вычисляют прогнозируемую траекторию, при этом непрерывно вычисляют на основе параметров текущего динамического состояния минимально допустимые радиусы разворота, затем прогнозируют упомянутые радиусы разворота на время определения потенциально опасного рельефа, а далее путем сканирования пространства прогнозируемой траекторией формируют безопасный коридор, границы которого определяют с учетом возможности разворота ЛА на обратный курс в соответствии с прогнозируемыми значениями минимально допустимых радиусов разворота, определяют потенциально опасный рельеф сопоставлением упомянутого безопасного коридора с рельефом местности и предупреждают о наличии потенциально опасного рельефа, отличающийся тем, что внутри безопасного коридора формируют защитное пространство с аварийной сигнальной областью, прогнозируют аварийную сигнальную область на длину безопасного коридора, при этом в случае пересечения рельефа местности безопасным коридором по обе стороны от прогнозируемой траектории, а также в случае пересечения рельефа местности безопасным коридором по одну сторону от прогнозируемой траектории и одновременно прогнозируемой аварийной сигнальной областью, производят исследование пространства путем вариаций параметров безопасного коридора и соответствующей прогнозируемой траектории последовательным перебором возможных изменений траекторного угла и допустимых радиусов разворота в диапазонах возможных изменений величины путевой скорости и направления бокового маневрирования, определяют безопасные варианты изменения параметров полета и соответствующие им маневры ЛА, упомянутые маневры ЛА отображают в удобной для пилота форме для выбора наиболее эффективного из них по условиям полета.
2. Способ по п.1, отличающийся тем, что длину части безопасного коридора, расположенной в направлении полета ЛА, выбирают из условия:
Dбк=W·(t1+t2+t3),
где W - путевая скорость ЛА;
t1 - максимально возможное время полета ЛА до препятствия, определяемое длиной защитного пространства;
t2 - время, необходимое пилоту для принятия решения о необходимости дополнительного маневрирования;
t3 - время, необходимое для изменения текущих параметров полета на параметры, требуемые для выполнения выбранного маневра.
3. Способ по п.1, отличающийся тем, что длину аварийной сигнальной области выбирают из условия
Dao=W·t4,
где t4 - максимально возможное время полета ЛА до препятствия, определяемое длиной аварийной сигнальной области.
4. Способ по п.1, отличающийся тем, что отображение информации для пилота ЛА производят на матричной панели, каждый элемент которой соответствует одному из возможных вариантов маневрирования по уходу от потенциально опасного рельефа, например на элементах левого столбца панели отображают маневры с выполнением левого разворота, на элементах центрального столбца панели отображают маневры с прямолинейным движением, а на элементах правого столбца панели отображают маневры с выполнением правого разворота, при этом на элементах первой строки матричной панели отображают маневры, выполняемые без торможения, увеличения мощности и набора высоты, а на элементах второй и третьей строк отображают маневры, выполняемые с набором высоты соответственно с торможением и увеличением мощности двигателя.
5. Способ по пп.1 и 3, отличающийся тем, что в случае ЛА, способного к зависанию, вводят дополнительную четвертую строку матричной панели, на элементах которой отображают маневры, выполняемые с зависанием.
6. Устройство предупреждения столкновения самолетов и вертолетов с рельефом местности, содержащее навигационную систему, обнаружитель препятствий в прогнозируемом полете ЛА, блок управления, базу данных рельефа, устройство сигнализации, видеогенератор и дисплей на выходе видеогенератора, формирователь безопасного коридора прогнозируемого полета, узел памяти и базу аэронавигационной информации, при этом выходы навигационной системы, блока управления и базы данных рельефа соединены соответственно с первым, вторым и третьим входами обнаружителя препятствий в прогнозируемом полете, четвертый и пятый входы которого соединены соответственно с выходами формирователя безопасного коридора прогнозируемого полета и базы аэронавигационной информации, первый, второй и третий выходы обнаружителя препятствий в прогнозируемом полете подключены соответственно к первому, второму и третьему входам формирователя безопасного коридора прогнозируемого полета, четвертый и пятый выходы упомянутого обнаружителя препятствий в прогнозируемом полете подключены соответственно ко входу устройства сигнализации и первому входу видеогенератора, а шестой выход обнаружителя препятствий в прогнозируемом полете подключен ко входу узла памяти и третьему входу видеогенератора, второй и четвертый входы которого подключены соответственно к выходу базы аэронавигационной информации и третьему выходу обнаружителя препятствий в прогнозируемом полете, а выход подключен ко входу дисплея, при этом выход узла памяти подключен к пятому входу видеогенератора, отличающееся тем, что введены блок формирования и прогнозирования защитного пространства, блок анализа, обнаружитель препятствий в вариантах прогнозируемого полета ЛА, формирователь безопасных коридоров вариантов прогнозируемого полета, определитель безопасных маневров, матричная панель отображения безопасных маневров, при этом вход блока формирования и прогнозирования защитного пространства подключен к четвертому выходу обнаружителя препятствий в прогнозируемом полете, а выход подключен ко входу блока анализа, выход которого подключен к первому входу обнаружителя препятствий в вариантах прогнозируемого полета, второй вход которого соединен с выходом базы аэронавигационной информации, а третий, четвертый и пятый входы соединены соответственно с выходом базы данных рельефа, выходом навигационной системы и первым выходом формирователя безопасных коридоров вариантов прогнозируемого полета, первый и второй выходы обнаружителя препятствий в вариантах прогнозируемого полета соединены соответственно со входом формирователя безопасных коридоров вариантов прогнозируемого полета и первым входом определителя безопасных маневров, второй вход которого соединен со вторым выходом формирователя безопасных коридоров вариантов прогнозируемого полета, а выход определителя безопасных маневров соединен со входом матричной панели.
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С РЕЛЬЕФОМ МЕСТНОСТИ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2006 |
|
RU2301456C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ВОЗДУШНОГО СУДНА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2005 |
|
RU2297047C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 2005 |
|
RU2271039C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2004 |
|
RU2262746C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| WO 2005109138 A1, 17.11.2005 | |||
| Объемный лестничный блок | 1978 |
|
SU802469A1 |

