Изобретение относится к области безопасности полетов, в частности, к системам раннего предупреждения летного экипажа об опасной близости земли и может использоваться на всех типах летательных аппаратов (ЛА) для повышения безопасности полетов.
Известны системы предупреждения столкновения ЛА с землей, в которых реализуется определение местоположения ЛА с помощью навигационной системы, вычисление параметров текущего динамического состояния ЛА, оценка его координат с экстраполяцией на заданный временной интервал, вычисление прогнозируемой траектории, сопоставление ее с рельефом местности и предупреждение об опасности путем формирования сигнализации и видеоотображения опасного рельефа [1-3].
Наиболее близкой к заявляемому решению является система предупреждения столкновения (СПС), реализованная по схеме, предложенной в патенте [3], которая является прототипом заявляемой СПС. Данная СПС содержит (см. фиг.2) базу данных рельефа и модуль адаптации к типу самолета, входы которых соответственно подключены к первому и второму выходам блока заполнения и обновления, блок вертикального облета, первый вход которого соединен с выходом базы данных рельефа, а второй, третий и четвертый входы подключены соответственно к выходам упомянутого модуля адаптации к типу самолета, блока информационных датчиков и поста управления, первый выход блока вертикального облета соединен с входом блока предупреждающих сигналов, его второй и третий выходы соединены с входами блока отображения, при этом блок вертикального облета составлен из временной локальной карты, вход которой образует первый вход блока вертикального облета, а выход ее подключен к первому входу вычислителя законов предупреждения столкновения, первому входу вычислителя законов вертикального маневра, и входу формирователя видеоинформации, выход которого образует третий выход блока вертикального облета, второй, третий и четвертый входы вычислителя законов предупреждения столкновения образуют одноименные входы блока вертикального облета, а выход вычислителя законов предупреждения столкновения соединен с входом анализатора положения и вторым входом вычислителя законов вертикального маневра, первый выход анализатора положения образует первый выход блока вертикального облета, а второй выход упомянутого анализатора положения соединен с третьим входом вычислителя законов вертикального маневра. На схеме СПС, приведенной в патенте [3], совмещены элементы устройства и способа. Кроме того, в ряде случаев выполнен перевод, не совпадающий с принятой терминологией. В схеме СПС прототипа (фиг.2) дана принятая заявителем терминология, при этом признаки способа заменены признаками устройств - узлов и блоков по патенту [3] с использованием уточненного перевода по текстам патентов [1, 2].
Недостатком системы-прототипа является то, что при возникновении опасной ситуации предупреждение столкновения производится только путем анализа возможности вертикального маневра, отрицательный результат такого анализа (невозможность предотвращения столкновения путем вертикального маневра) говорит лишь о том, что необходимо выполнить боковой маневр. Однако направление и траектория бокового маневра не определяются и предоставляются на самостоятельное решение пилоту.
Задачей настоящего изобретения является не только выполнение оценки возможности вертикального маневра, но и, при отрицательном результате такой оценки, определение направления разворота путем анализа как левого, так и правого разворота и выбора наиболее предпочтительного из них в данной ситуации.
Поставленная задача решается следующим образом.
В системе предупреждения столкновения летательного аппарата с землей, содержащей базу данных рельефа и модуль адаптации к типу самолета, входы которых соответственно подключены к первому и второму выходам блока заполнения и обновления, блок вертикального облета, первый вход которого соединен с выходом базы данных рельефа, а второй, третий и четвертый входы подключены соответственно к выходам упомянутого модуля адаптации к типу самолета, блока информационных датчиков и поста управления, первый выход блока вертикального облета соединен с входом блока предупреждающих сигналов, его третий выход соединен с входом блока отображения, при этом блок вертикального облета составлен из временной локальной карты, вход которой образует первый вход блока вертикального облета, а выход ее подключен к первому входу вычислителя законов предупреждения столкновения, первому входу вычислителя законов вертикального маневра и входу формирователя видеоинформации, выход которого образует третий выход блока вертикального облета, второй, третий и четвертый входы вычислителя законов предупреждения столкновения образуют одноименные входы блока вертикального облета, а выход вычислителя законов предупреждения столкновения соединен с входом анализатора положения и вторым входом вычислителя законов вертикального маневра, первый выход анализатора положения образует первый выход блока вертикального облета, а второй выход упомянутого анализатора положения соединен с третьим входом вычислителя законов вертикального маневра, выход которого образует второй выход блока вертикального облета, введены локальная карта бокового маневра, ограничитель локальной карты и блок направления разворота, при этом первый вход локальной карты бокового маневра соединен с выходом базы данных рельефа, ее второй вход соединен с дополнительным выходом блока вертикального облета, образованным первым дополнительным выходом вычислителя законов вертикального маневра, второй дополнительный выход которого соединен с первым дополнительным входом формирователя видеоинформации, выход локальной карты бокового маневра соединен с первым входом блока направления разворота и с первым входом ограничителя локальной карты, выход которой соединен с дополнительным входом блока вертикального облета, соединенного с вторым дополнительным входом формирователя видеоинформации, второй вход блока направления разворота соединен с вторым выходом блока вертикального облета, а выход блока направления разворота соединен с дополнительным входом блока предупреждающих сигналов и вторым входом ограничителя локальной карты, при этом блок направления разворота составлен из анализатора условий облета, вход которого образует второй вход блока направления разворота, а выход соединен с первыми входами вычислителя левого движения и вычислителя правого движения, вторые входы которых соединены с первым входом блока направления разворота, а выходы упомянутых вычислителей левого и правого движения соединены с первыми входами соответствующих компараторов левого и правого движения, вторые входы которых соединены с соответствующими первым и вторым выходами базы параметров критериев, вход которой соединен с дополнительным информационным входом блока направления разворота, выходы компаратора левого движения и компаратора правого движения соответственно подключены к входам узла весовой оценки траекторий левого движения и узла весовой оценки траекторий правого движения, выходы которых соединены соответственно с первым и вторым входами анализатора направления разворота, третий вход которого соединен с третьим выходом базы параметров критериев, а выход которого образует выход блока направления разворота.
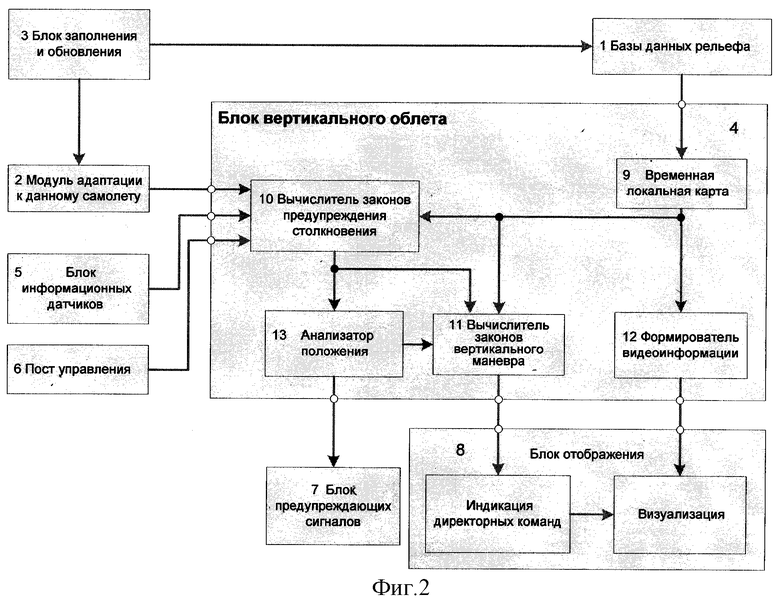
Работа заявляемой системы поясняется с помощью Фиг.1.
Система предупреждения столкновения летательного аппарата с землей содержит (см. Фиг.1) базу данных рельефа 1 и модуль адаптации к типу самолета 2, входы которых соответственно подключены к первому и второму выходам блока заполнения и обновления 3, блок вертикального облета 4, первый вход которого соединен с выходом базы данных рельефа, а второй, третий и четвертый входы подключены соответственно к выходам упомянутого модуля адаптации к типу самолета 2, блока информационных датчиков 5 и поста управления 6, первый выход блока вертикального облета соединен с входом блока предупреждающих сигналов 7, его третий выход соединен с входом блока отображения 8, при этом блок вертикального облета составлен из временной локальной карты 9, вход которой образует первый вход блока вертикального облета, а выход ее подключен к первому входу вычислителя законов предупреждения столкновения 10, первому входу вычислителя законов вертикального маневра 11 и входу формирователя видеоинформации 12, выход которого образует третий выход блока вертикального облета, второй, третий и четвертый входы вычислителя законов предупреждения столкновения образуют одноименные входы блока вертикального облета, а выход вычислителя законов предупреждения столкновения соединен с входом анализатора положения 13 и вторым входом вычислителя законов вертикального маневра 11, первый выход анализатора положения 13 образует первый выход блока вертикального облета, а второй выход упомянутого анализатора положения соединен с третьим входом вычислителя вертикального маневра 11, выход которого образует второй выход блока вертикального облета 4. Введены локальная карта бокового маневра 14, ограничитель локальной карты 15 и блок направления разворота 16, при этом первый вход локальной карты бокового маневра 14 соединен с выходом базы данных рельефа 1, ее второй вход соединен с дополнительным выходом блока вертикального облета 4, образованным первым дополнительным выходом вычислителя законов вертикального маневра 11, второй дополнительный выход которого соединен с первым дополнительным входом формирователя видеоинформации 12, выход локальной карты бокового маневра 14 соединен с первым входом блока направления разворота 16 и с первым входом ограничителя локальной карты 15, выход которой соединен с дополнительным входом блока вертикального облета, соединенного с вторым дополнительным входом формирователя видеоинформации 12, второй вход блока направления разворота соединен с вторым выходом блока вертикального облета 4, а выход блока направления разворота соединен с дополнительным входом блока предупреждающих сигналов 7 и вторым входом ограничителя локальной карты 15, при этом блок направления разворота 4 составлен из анализатора условий облета 17, вход которого образует второй вход блока направления разворота 16, а выход соединен с первыми входами вычислителя левого движения 18 и вычислителя правого движения 19, вторые входы которых соединены с первым входом блока направления разворота, а выходы упомянутых вычислителей левого и правого движения соединены с первыми входами соответствующих компараторов левого 20 и правого 21 движения, вторые входы которых соединены с соответствующими первым и вторым выходами базы параметров критериев 22, вход которой соединен с дополнительным информационным входом блока направления разворота, выходы компаратора левого движения 20 и компаратора правого движения 21 соответственно подключены к входам узла весовой оценки траекторий левого движения 23 и узла весовой оценки траекторий правого движения 24, выходы которых соединены соответственно с первым и вторым входами анализатора направления разворота 25, третий вход которого соединен с третьим выходом базы параметров критериев 22, а выход которого образует выход блока направления разворота 16.
Система работает следующим образом.
Аналогично системе-прототипу [см. фиг.2] в системе на фиг.1 в блоке вертикального облета 4 производится оценка опасной ситуации и возможности ее устранения путем вертикального маневра, при этом вычислитель законов предупреждения столкновения 10, на входы которого поступают сигналы от информационных блоков 2, 5, 6 и от временной локальной карты 9 производит на основе данных о координатах и параметрах движения ЛА вычисление траектории на фоне текущего рельефа при заданном времени прогнозирования. Анализатор положения 13 производит сравнительную оценку вычисленной упомянутой траектории с текущим рельефом и выдает 9 сигнал о возможности опасной ситуации в вычислитель законов вертикального маневра 11. Одновременно анализатор положения 13 выдает сигнал об опасной ситуации в блок предупреждающих сигналов 7. Вычислитель законов вертикального маневра 11, на вход которого поступают сигналы с выходов временной локальной карты 9 и вычислителя 10, производит расчет возможных вариантов избежания опасной ситуации при маневрировании в вертикальном направлении, т.е. путем изменения только высоты полета. Результат анализа, проведенного вычислителем 11, передается на вход блока отображения, на другой вход которого поступает через формирователь видеоинформации 12 данные с временной локальной карты 9. Временная локальная карта 9 постоянно обновляется с выхода базы данных рельефа 1, которая в свою очередь обновляется с помощью блока заполнения и обновления 3, корректирующего также данные о параметрах ЛА в модуле адаптации 2.
Таким образом, система-прототип выдает только сигнал о результатах анализа вертикального маневра и при отрицательном результате - сигнал о необходимости бокового маневра. Однако при этом система-прототип не указывает направление и необходимые параметры бокового маневра.
В предложенной системе (см. фиг.1) эту функцию выполняет блок направления разворота 16, включающий анализатор условия облета 17, на вход которого поступает из блока вертикального облета 4 (с выхода вычислителя законов вертикального маневра 11) признак опасности выполнения вертикального маневра и текущие параметры вектора состояния ЛА. В анализаторе 17 на основе параметров состояния ЛА (координаты, скорости, ускорения, углы и др.) происходит формирование нормализованных данных для передачи в вычислители 18 и 19. В упомянутых вычислителях производится формирование с учетом динамических и эргономических ограничений ЛА всех возможных траекторий боковых маневров ЛА, а также согласование этих данных с данными рельефа в соответствии с локальной картой 14, поступающими на вторые входы вычислителей 18 и 19. Совокупность сформированных пакетов данных поступает из вычислителей 18 и 19 на первые входы компараторов 20 и 21. В базе параметров критериев 22 содержатся поступающие через дополнительный информационный вход постоянно обновляемые данные о минимально допустимых высотах полета ЛА, об эргономических (максимально допустимые перегрузки) и динамических характеристиках ЛА, данные от систем управления воздушным движением (УВД) (наличие встречных или попутных ЛА, ширина трассы полета, зоны ограничения полета и др.), от бортового метеолокатора (наличие опасных метеоявлений в районе полета ЛА). Данные из базы 22 поступают на вторые входы компараторов 20 и 21, в которых осуществляется сравнение сформированных траекторий боковых маневров ЛА с данными от локальной карты бокового маневра, поступающими через вычислители 18 и 19; при этом происходит формирование признака оптимальности каждой траектории по критериям минимального отклонения от плана полета, максимального запаса высоты от ЛА до земной поверхности и горизонтального удаления ЛА от препятствия при движении по данной траектории.
Из компараторов 20 и 21 в соответствующие узлы весовой оценки 23 и 24 поступают рассчитанные возможные траектории боковых маневров ЛА с признаками оптимальности, полученные на основе проведенного в компараторах сравнительного анализа.
В узлах весовой оценки производится сравнение параметров оптимальности всех сформированных траекторий с учетом данных, содержащихся в базе параметров критериев, и выбор из ряда анализируемых траекторий только одной траектории, максимально удовлетворяющей заданным критериям.
Выбранные в узлах 23 и 24 траектории левого и правого движения передаются в анализатор направления разворота 25, в котором с помощью данных из базы параметров критериев 22 осуществляется окончательный выбор наиболее предпочтительного направления разворота и соответствующей траектории. Результат выбора поступает из анализатора 25 в блок предупреждающих сигналов 7, который выдает пилоту сигнал на выполнение соответствующих действий для выхода на выбранную траекторию. Кроме того, сигнал с анализатора 25 поступает в ограничитель локальной карты 15, который выбирает для дальнейшего отображения участок карты, соответствующий выбранной траектории. При этом формирование видеоинформации для блока отображения 8 производится формирователем 12, в котором информация с временной локальной карты 9 замещается по сигналу с дополнительного выхода вычислителя 11 информацией с ограничителя локальной карты 15 и далее передается с выхода формирователя 12 на вход блока отображения 8. При этом сигналы поступающие ранее в блок отображения 8 с выхода вычислителя 11 блокируются.
Таким образом, благодаря наличию в предлагаемой системе блока направления разворота, при невозможности вертикального маневра формируется не просто сигнал (признак) необходимости бокового маневра, как в прототипе, но и определение направления и траектории разворота путем анализа как левого, так и правого разворота и выбора наиболее предпочтительного из них в данной ситуации.
Предложенная система полностью реализуется в устройствах, представленных на фиг.1.
Блоки и устройства, представленные на фиг.1 реализуются с использованием аппаратно-программных модулей, построенных на базе широко распространенных стандартных устройств аналоговой и цифровой вычислительной техники.
Для разработки программного обеспечения, реализующего необходимые функции упомянутых устройств, использовались стандартные языки программирования ("С", "C++"), программно-математическое обеспечении фирм "MICROSOFT", "BORLAND" и известные математические формулы.
Блок направления разворота 16 и блок вертикального облета 4 реализованы на базе интегрированного модуля фирмы "AMPRO" с процессорным модулем фирмы "ANALOG MICRODEVICSES", работающего от источника питания фирмы "АЛЕКСАНДЕР ЭЛЕКТРИК". В указанных блоках также используются интерфейсные микросхемы фирмы "ANALOG DEVICES" и прецизионные программируемые усилители фирмы "TEXAS INSTRUMENTS"
Блок 7 реализован на базе аналоговых звуковых кодеров и декодеров фирмы "TEXAS INSTRUMENTS", операционных усилителей фирмы "MAXIM" и программируемых логических интегральных схем фирмы "ALTERA".
Блок 8 реализован на базе видеоконтроллера фирмы "SHARP", видеоусилителей фирмы "MAXIM" и высоковольтных преобразователей фирмы "TDK" с использованием жидкокристаллической матрицы фирмы "SHARP".
Блоки 10 и 12 реализованы на базе постоянных запоминающих устройств "DiskOnChip" фирмы "M-SYSTEMS".
Блоки 1, 9, 14 реализованы на базе переключателей фирмы "BOURNS",соединителей фирмы "MOLEX", преобразователей напряжений фирмы "MAXIM".
Экспериментальный образец системы показал, что вычисление направления разворота и соответствующие команды пилоту ЛА на 35-40% снижают время, затрачиваемое пилотом на выбор направления разворота при полетах в условиях сложного рельефа, и, соответственно, значительно повышают безопасность полета.
Выделение в блоке направления разворота двух отдельных вычислительных потоков для левого и правого движений позволило реализовать предлагаемую систему на базе имеющейся в настоящее время бортовой авиационной аппаратуры и одновременно повысило надежность системы.
Математическое моделирование, полунатурные и летные испытания системы, в которой реализован заявляемый способ, показывают, что вероятности аварийных летных ситуаций по сравнению с прототипом снижается на 20-25%.
Проведенные летные испытания на самолетах Ту-154, Як-40 и Як-42 показали эффективность использования заявляемого устройства.
Т.о. заявляемое изобретение чрезвычайно перспективно для использования на ВС для снижения вероятности летных происшествий.
Источники информации
1. Патент Франции №2773609, кл. G 01 C 5/00, заявл. 12.01.1998 г., опубл. 16.07.1999 г.
2. Патент США №6480120, кл. G 08 B 23/00, заявл. 15.04.1996 г., опубл. 12.11.2002 г.
3. Патент Россия №2211489, кл. G 08 G 5/04, заявл. 11.01.1999 г., опубл. 27.08.2003 г.
Изобретение относится к технике обеспечения безопасности полетов путем раннего предупреждения летного экипажа об опасной близости земли. Система содержит базу данных рельефа и модуль адаптации к типу самолета, входы которых подключены соответственно к первому и второму выходам блока заполнения и обновления. Имеется блок вертикального облета, входы которого соединены с выходами базы данных рельефа, модуля адаптации к типу самолета, блока информационных датчиков и поста управления. Первый выход блока вертикального облета соединен с входом блока предупреждающих сигналов, а его третий выход соединен с входом блока отображения. Кроме того, в систему введены локальная карта бокового маневра, ограничитель локальной карты и блок направления разворота. Первый вход локальной карты бокового маневра соединен с выходом базы данных рельефа, ее второй вход соединен с дополнительным выходом блока вертикального облета. Выход локальной карты бокового маневра соединен с первым входом блока направления разворота и с первым входом ограничителя локальной карты. Выход последнего соединен с дополнительным входом блока вертикального облета. Второй вход блока направления разворота соединен со вторым выходом блока вертикального облета. Выход блока направления разворота соединен с дополнительным входом блока предупреждающих сигналов и вторым входом ограничителя локальной карты. Система позволяет определять направление бокового разворота в случае опасности столкновения летательного аппарата с землей при сохранении направления полета. Это предопределяет повышенную безопасность полетов. 2 ил.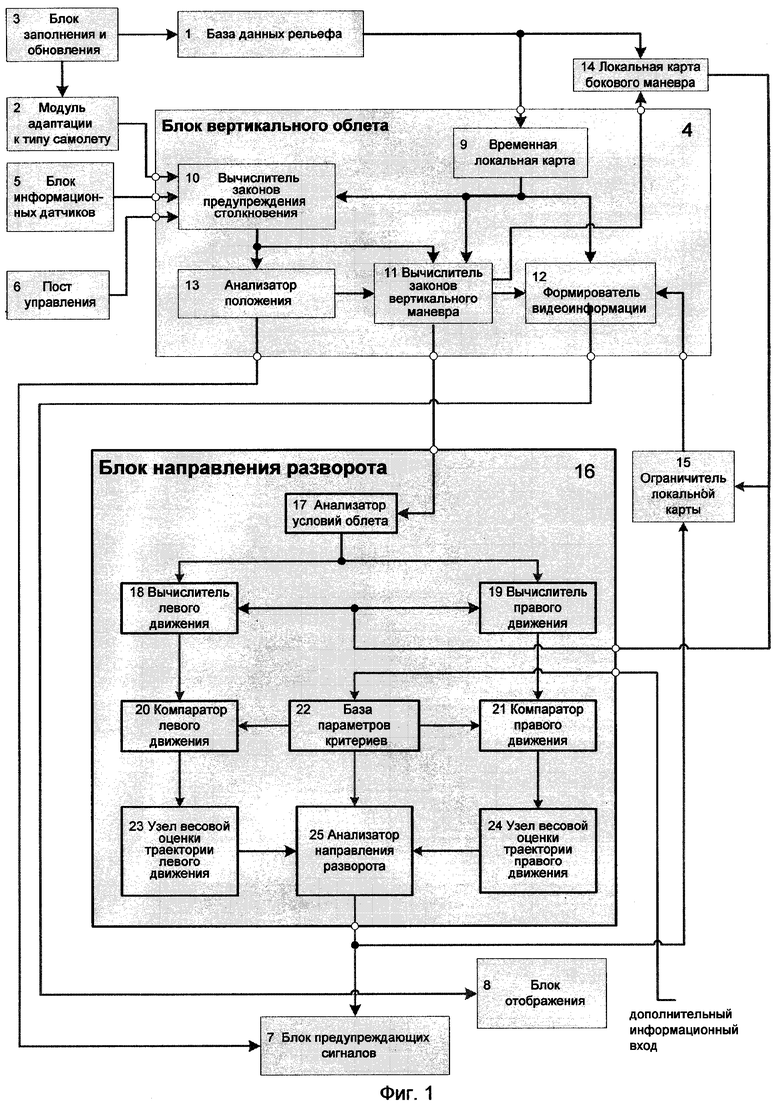
Система предупреждения столкновения летательного аппарата с землей, содержащая базу данных рельефа и модуль адаптации к типу самолета, входы которых соответственно подключены к первому и второму выходам блока заполнения и обновления, блок вертикального облета, первый вход которого соединен с выходом базы данных рельефа, а второй, третий и четвертый входы подключены соответственно к выходам упомянутого модуля адаптации к типу самолета, блока информационных датчиков и поста управления, первый выход блока вертикального облета соединен с входом блока предупреждающих сигналов, его третий выход соединен с входом блока отображения, при этом блок вертикального облета составлен из временной локальной карты, вход которой образует первый вход блока вертикального облета, а выход ее подключен к первому входу вычислителя законов предупреждения столкновения, первому входу вычислителя законов вертикального маневра и входу формирователя видеоинформации, выход которого образует третий выход блока вертикального облета, второй, третий и четвертый входы вычислителя законов предупреждения столкновения образуют одноименные входы блока вертикального облета, а выход вычислителя законов предупреждения столкновения соединен с входом анализатора положения и вторым входом вычислителя законов вертикального маневра, первый выход анализатора положения образует первый выход блока вертикального облета, а второй выход упомянутого анализатора положения соединен с третьим входом вычислителя законов вертикального маневра, выход которого образует второй выход блока вертикального облета, отличающаяся тем, что введены локальная карта бокового маневра, ограничитель локальной карты и блок направления разворота, при этом первый вход локальной карты бокового маневра соединен с выходом базы данных рельефа, ее второй вход соединен с дополнительным выходом блока вертикального облета, образованным первым дополнительным выходом вычислителя законов вертикального маневра, второй дополнительный выход которого соединен с первым дополнительным входом формирователя видеоинформации, выход локальной карты бокового маневра соединен с первым входом блока направления разворота и с первым входом ограничителя локальной карты, выход которого соединен с дополнительным входом блока вертикального облета, соединенного со вторым дополнительным входом формирователя видеоинформации, второй вход блока направления разворота соединен с вторым выходом блока вертикального облета, а выход блока направления разворота соединен с дополнительным входом блока предупреждающих сигналов и вторым входом ограничителя локальной карты, при этом блок направления разворота составлен из анализатора условий облета, вход которого образует второй вход блока направления разворота, а выход соединен с первыми входами вычислителя левого движения и вычислителя правого движения, вторые входы которых соединены с первым входом блока направления разворота, а выходы упомянутых вычислителей левого и правого движения соединены с первыми входами соответственно компараторов левого и правого движения, вторые входы которых соединены соответственно с первым и вторым выходами базы параметров критериев, вход которой соединен с дополнительным информационным входом блока направления разворота, выходы компаратора левого движения и компаратора правого движения подключены к входам соответственно узла весовой оценки траекторий левого движения и узла весовой оценки траекторий правого движения, выходы которых соединены соответственно с первым и вторым входами анализатора направления разворота, третий вход которого соединен с третьим выходом базы параметров критериев, а выход образует выход блока направления разворота.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ С ЗЕМЛЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА С УСОВЕРШЕНСТВОВАННОЙ СИСТЕМОЙ ВИЗУАЛИЗАЦИИ | 1999 |
|
RU2211489C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 2003 |
|
RU2234739C1 |
| УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 1995 |
|
RU2153195C1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| EP 1450331 A1, 25.08.2004. | |||

