Таблицы Т%





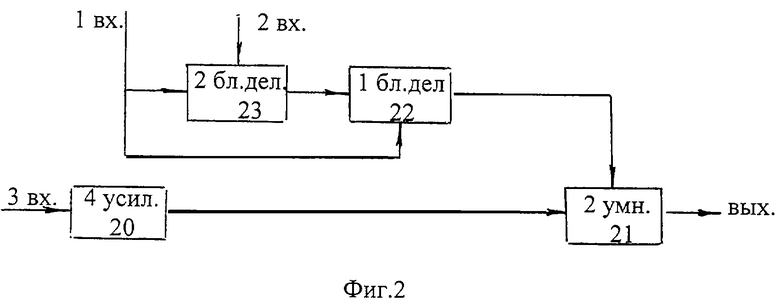

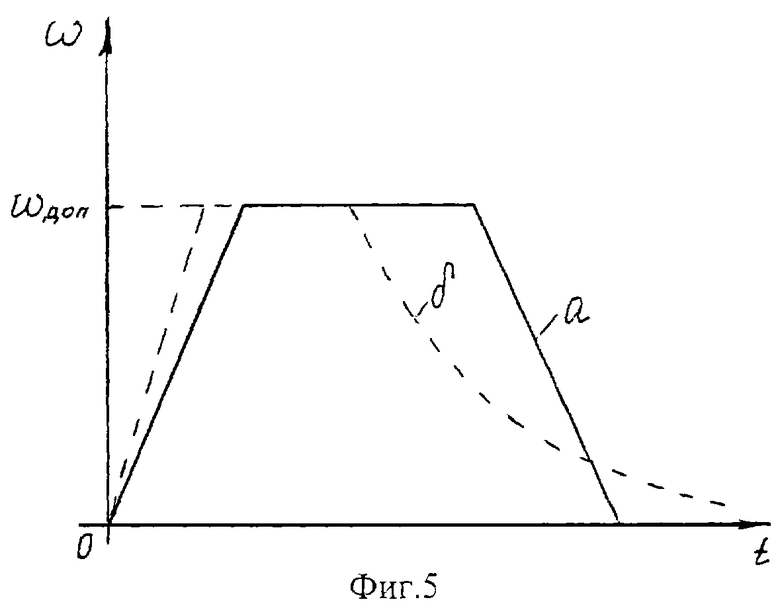
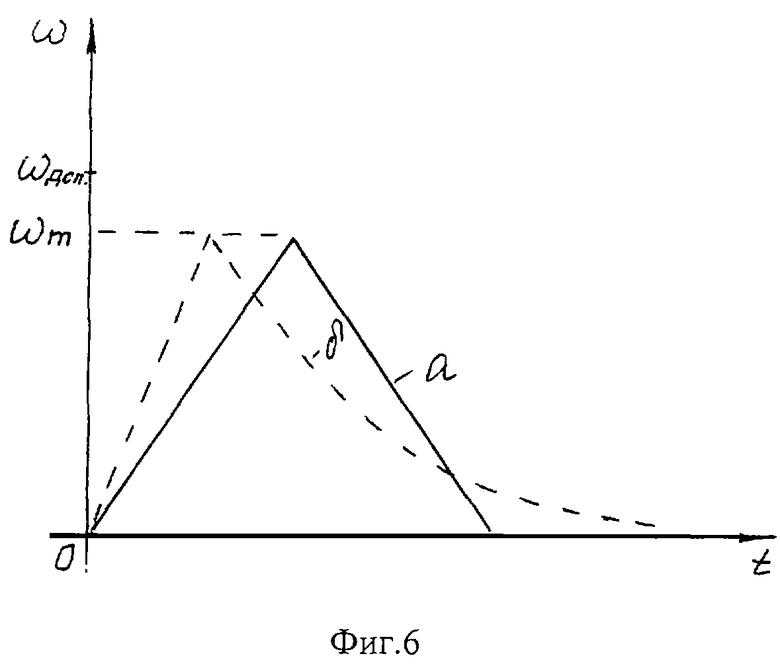
Изобретение относится к системам автоматического управления нестационарными, преимущественно космическими, объектами. Предлагаемая система служит для разворота космического аппарата в заданное угловое положение. В систему введены переключатель, а также блоки: определения модуля, вычисления квадратного корня, выбора минимального сигнала угловой скорости и памяти. Кроме того, система содержит задатчики минимального ускорения и допустимой угловой скорости разворота, функциональный усилитель и нелинейный элемент с ограничением. При этом функциональный усилитель включает в себя четвертый усилитель, второй умножитель, первый и второй блоки деления. Система управления оптимизирует по быстродействию переходные процессы в условиях высокой степени нестационарности эффективности управляющих двигателей и параметров собственно космического аппарата. Последние обусловлены, например, отказами этих двигателей, изменением массы космического аппарата при выгорании топлива на основном маршевом двигателе и т.д. Изобретение позволяет уменьшить расход топлива при оптимальном быстродействии разворотов космического аппарата. 1 з.п.ф-лы, 6 ил.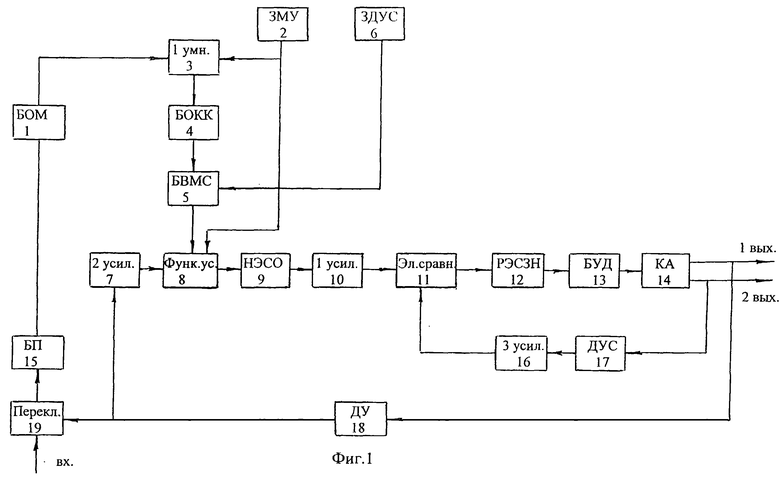
| РАЗЫГРАЕВ А.П | |||
| Основы управления полетом космических аппаратов | |||
| - М.: Машиностроение, 1990, с | |||
| Шкив для канатной передачи | 1920 |
|
SU109A1 |
| СПОСОБ УПРАВЛЕНИЯ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА | 1998 |
|
RU2131832C1 |
| СПОСОБ УПРАВЛЕНИЯ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА | 1996 |
|
RU2104232C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА | 1996 |
|
RU2115597C1 |
| US 5433402 А, 18.07.1995 | |||
| US 5452869 А, 26.09.1995 | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
