Изобретение относится к космической технике, а именно к области техники, связанной с терминальным правлением разгонных блоков с нерегулируемой тягой маршевого двигателя.
Одной из основных операций терминального управления разгонных блоков с нерегулируемой тягой маршевых двигателей является прогноз момента времени отсечки маршевого двигателя, определяемого из условия достижения заданного функционала при отработке текущей программы ориентации тяги двигателя. На этот момент определяют параметры движения разгонного блока и отклонения от заданной орбиты, по которым выполняется коррекция программ ориентации тяги маршевого двигателя.
В качестве модели прогноза траекторного движения разгонного блока как материальной точки используется система дифференциальных уравнений

где  - вектор абсолютной скорости;
- вектор абсолютной скорости; - кажущееся ускорение;
- кажущееся ускорение; - единичный вектор тяги;
- единичный вектор тяги; - радиус-вектор;
- радиус-вектор; - вектор гравитационного ускорения.
- вектор гравитационного ускорения.
Для установившегося режима работы маршевого двигателя в пустоте кажущееся ускорение  определяется по формуле
определяется по формуле
где p - тяга маршевого двигателя;
mо - масса разгонного блока на момент начала маневра; - секундный расход топлива;
- секундный расход топлива;
t - время, отсчитываемое от начала маневра.
Соотношение (1) может быть представлено в виде
где  - условное время сгорания массы mo, разгонного блока,
- условное время сгорания массы mo, разгонного блока, - удельный импульс тяги маршевого двигателя.
- удельный импульс тяги маршевого двигателя.
Как показывает практика для разгонного блока с нерегулируемой тягой маршевого двигателя, возможный разброс отклонений удельного импульса от его номинального значения незначителен (менее 1%), тогда как отклонения по тяговооруженности могут быть в пределах ±8%.
С учетом этого величина параметра τ0 может иметь разброс до 10% от ее номинального значения, что существенным образом сказывается на точности выполнения прогноза траекторного движения разгонного блока и выполнении задач полета.
Нормальное функционирование терминального управления и требуемая точность построения орбит, как показывают расчеты, обеспечиваются при точности определения параметра τ0 не хуже ±1% от его действительного значения.
При отсутствии на борту разгонного блока датчиков, измеряющих тягу и секундный расход топлива, значение параметра τ0 может быть определено путем его идентификации, базирующейся на информации о текущем значении модуля кажущегося ускорения 
Из уравнения (2) получим зависимост:
где


Соотношение (3) при условии постоянства удельного импульса тяги маршевого двигателя J определяет линейное по времени изменение величины, обратной кажущемуся ускорению, в котором коэффициент а пропорционален параметру τ0.
Задачей идентификации является определение параметра τ0 по значениям Уi полученным в моменты времени ti.
Наиболее близким техническим решением является система идентификации условного времени сгорания массы разгонного блока, содержащая последовательно соединенные измеритель кажущегося ускорения (ИКУ), определитель обратной величины (ООВ), первый интегратор и вычислитель условного времени сгорания массы разгонного блока (ВУВСМРБ), счетчик времени (СВ), выход которого через сумматор времен измерений (СВИ) подключен ко второму входу, а выход счетчика тактов (СТ) - к третьему входу вычислителя условного времени сгорания массы разгонного блока [1].
В известной системе процесс идентификации основан на сглаживании значений Уi по методу наименьших квадратов [2].
Недостатком известной системы является то, что возможные флюктуации и низкочастотные изменения тяги двигателя через измеренные значения кажущегося ускорения сказываются на точности определения условного времени сгорания массы разгонного блока и, как следствие этого, на точности выполнения прогноза движения разгонного блока и коррекции программы ориентации тяги двигателя в процессе выполнения маневра.
Техническим результатом изобретения является повышение быстродействия и точности определения условного времени сгорания массы разгонного блока путем снижения влияния нестационарности характеристик двигателя разгонного блока и флюктуаций погрешностей измерения кажущегося ускорения.
Указанный технический результат достигается тем, что в известную систему идентификации условного времени сгорания массы разгонного блока, содержащую последовательно соединенные измеритель кажущегося ускорения, определитель обратной величины, первый интегратор и вычислитель условного времени сгорания массы разгонного блока, счетчик времени, выход которого через сумматор времен измерений подключен ко второму входу, а выход счетчика тактов - к третьему входу вычислителя условного времени сгорания массы ракетного блока, введены счетчик мерных интервалов, умножитель, второй интегратор и делитель, выход счетчика тактов через последовательно соединенные счетчик номера временного интервала, умножитель и второй интегратор подключен к первому входу делителя, второй выход счетчика мерных интервалов соединен со вторым входом делителя, а выход вычислителя условного времени сгорания массы разгонного блока соединен со вторым входом умножителя.
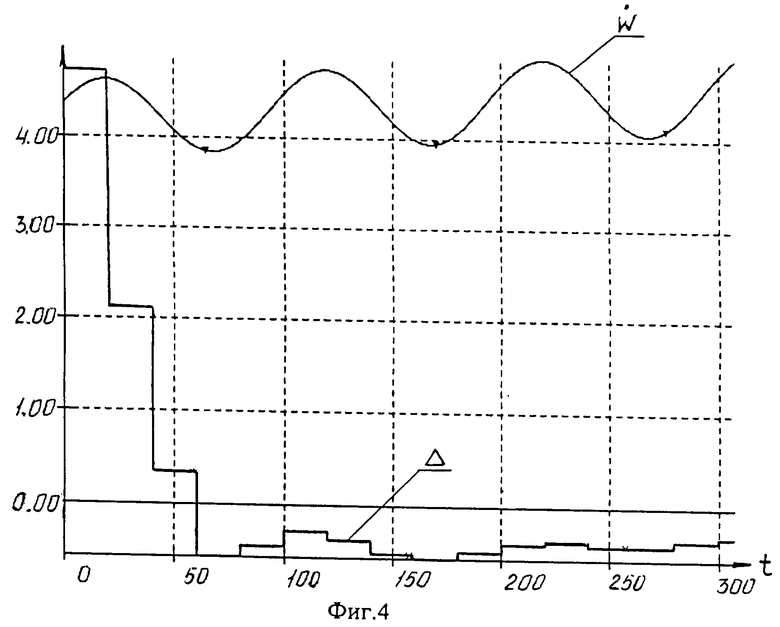
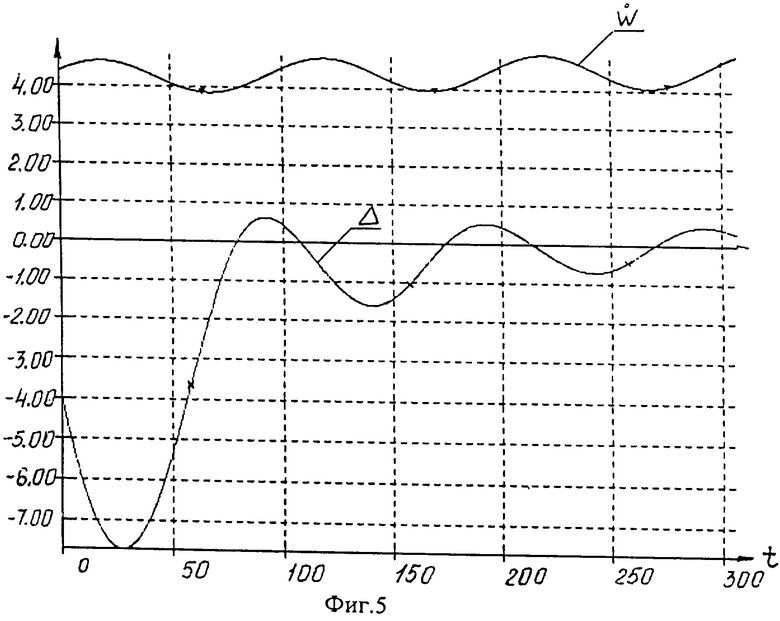
На фиг. 1 представлена структурная схема предлагаемой системы идентификации условного времени сгорания массы разгонного блока; на фиг.2 - структурная схема вычислителя системы; на фиг.3 - схема последовательности определения условного времени сгорания массы разгонного блока τ0; на фиг.4 и 5 изображены процессы изменения по времени относительной ошибки идентификации Δ условного времени сгорания массы разгонного блока τ0 при низкочастотном колебании кажущегося ускорения  соответственно предлагаемой системы и системы-прототипа.
соответственно предлагаемой системы и системы-прототипа.
Система идентификации условного времени сгорания массы разгонного блока (фиг.1) содержит последовательно соединенные измеритель кажущегося ускорения (ИКУ) 1, определитель обратной величины (OOВ) 2, первый интегратор 3 и вычислитель условного времени сгорания массы разгонного блока (ВУВСМРБ) 4, счетчик времени (СВ) 5, выход которого через сумматор времен измерений (СВИ) 6 подключен ко второму входу, а выход счетчика тактов (СТ) 7 - к третьему входу вычислителя условного времени сгорания массы разгонного блока 4, выход счетчика тактов 7 через последовательно соединенные счетчик мерных интервалов (СНВИ) 8, умножитель 9 и второй интегратор 10 подключен к первому входу делителя 11, второй выход счетчика мерных интервалов 8 соединен со вторым входом делителя 11, а выход вычислителя условного времени сгорания массы разгонного блока 4 соединен со вторым входом умножителя 9.
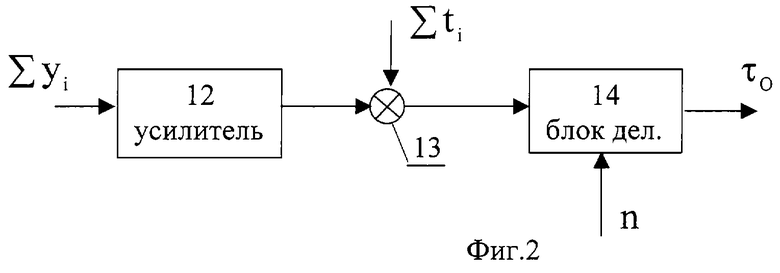
Вычислитель условного времени сгорания массы разгонного блока 4 (в дальнейшем - вычислитель 4) (фиг.2) содержит усилитель 12, сумматор 13 и блок деления 14, первый вход вычислителя 4 подключен через последовательно соединенные усилитель 12, сумматор 13 и блок деления 14 к выходу вычислителя 4, второй вход вычислителя 4 подключен ко второму входу сумматора 13, а третий вход - ко второму входу блока деления 14.
Система идентификации условного времени сгорания массы разгонного блока работает следующим образом.
Кажущееся ускорение  с выхода измерителя кажущегося ускорения 1 поступает на первый вход вычислителя 4 через определитель обратной величины 2, где формируется величина, обратная кажущемуся ускорению
с выхода измерителя кажущегося ускорения 1 поступает на первый вход вычислителя 4 через определитель обратной величины 2, где формируется величина, обратная кажущемуся ускорению  и первый интегратор 3, где суммируются обратные функции
и первый интегратор 3, где суммируются обратные функции 
Со счетчика времени 5 время ti измерения кажущегося ускорения  поступает на второй вход вычислителя 4 через сумматор времен измерений 6, где выполняется суммирование времен выполнения замеров
поступает на второй вход вычислителя 4 через сумматор времен измерений 6, где выполняется суммирование времен выполнения замеров  кажущегося ускорения.
кажущегося ускорения.
Со счетчика тактов 7 количество n выполненных измерений кажущегося ускорения поступает на третий вход вычислителя 4 и на вход счетчика мерных интервалов 8. Время ti и счет тактов вычислений отсчитываются от момента начала идентификации параметра τ0 на каждом маневре. Перед каждым маневром первый интегратор 3, счетчик времени 5, сумматор времен измерений 6, счетчик тактов 7, счетчик номера мерных интервалов 8 и второй интегратор 10 обнуляются.
В вычислителе 4 по информации, поступившей на каждом такте ее обновления на его входы, определяется текущая оценка условного времени сгорания топлива τ0 по зависимости
Блоки с 1 по 7 работают синхронно с тактом выполнения измерений кажущегося ускорения 
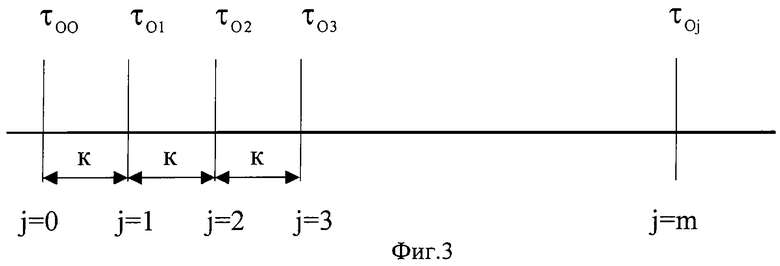
В счетчике номера мерных интервалов 8 после каждого интервала, состоящего из К тактов счета, номер интервала j изменяется на единицу, то есть j= j+1, если n=(j+1)к, причем в начале каждого маневра принимается n=0, j=0 (фиг.3).
Значение j+1 поступает со второго выхода счетчика мерных интервалов 8 на второй вход делителя 11. Одновременно с изменением j с первого выхода счетчика мерных интервалов 8 на второй вход умножителя 9 поступает признак χ=1, принимающий значение χ=0, когда нет изменения j.
На первый вход умножителя 9 поступает оценка параметра τ0 на каждом такте. При χ = 1 на выходе умножителя 9 формируется значение τOj при j≠0, которое поступает на вход второго интегратора 10, на выходе которого формируется сумма  определяемая как
определяемая как
где τOO - начальное значение параметра τ0;
τOj - значение параметра τO, вычисленное на j-ом интервале.
С выхода второго интегратора 10 вычисленная сумма приходит на первый вход делителя 11 в качестве делимого, а на второй вход - в качестве делителя - значение j+1. На выходе дeлителя 11 формируется условное время сгорания массы разгонного блока τO по зависимости
где
m - номер последнего полного мерного интервала;
к - количество замеров на мерном интервале;
n - количество выполненных измерений;
τOO - начальное значение параметра τO;
τOO = τОпз - для первого маневра;
τOO = τОпрм-tпрм - для последующих маневров;
τОпз - заданное в полетном задании номинальное значение τ0;
τОпрм - значение параметра τО с предыдущего маневра;
tпрм - длительность процесса идентификации на предыдущем маневре.
На фиг.4 представлены графики изменения по времени относительной ошибки идентификации  параметра τО при низкочастотном колебании кажущегося ускорения
параметра τО при низкочастотном колебании кажущегося ускорения  в пределах ±10% от его номинального значения с периодом Т=100 с предлагаемой системы
в пределах ±10% от его номинального значения с периодом Т=100 с предлагаемой системы
где Δ - относительная ошибка идентификации параметра τО;
τОд - действительное значение параметра τО;
τОид - значение параметра τО, полученное путем идентификации.
Процесс идентификации выполнен при количестве замеров на мерном интервале К=100 и такте счета 0,2 с.
Предложенная система обеспечивает вхождение погрешности идентификации Δ параметра τО в трубку ±1% за 40 с.
Для сравнения на фиг. 5 показаны графики изменения по времени относительной ошибки идентификации Δ параметра τО при низкочастотном колебании кажущегося ускорения  системы - прототипа. Процесс идентификации выполнен при тех же условиях.
системы - прототипа. Процесс идентификации выполнен при тех же условиях.
Вход в трубку погрешности ±1% выполняется на 160-й секунде после начала идентификации. Изменение погрешности идентификации Δ параметра τО до входа в эту трубку имеет колебательный характер.
Для наглядности изображения графики низкочастотного колебания кажущегося ускорения  на фиг.4 и 5 выполнены в масштабе 5:1.
на фиг.4 и 5 выполнены в масштабе 5:1.
Таким образом, предложенная система обеспечивает вхождение погрешности идентификации Δ в трубку ±1% за 40 с, что в четыре раза быстрее, чем в прототипе. При этом значительно снижена колебательность процесса.
Источники информации
1. Сыров А.С., Соколов В.Н., Ежов В.В., Кислик Л.И. Алгоритм наведения разгонного блока с нерегулируемым маршевым двигателем и малой тяговооруженностью. Авиакосмическая техника и технология, 1998, 1, с.31-33.
2. Вентцель Е.С. Теория вероятностей. - М.: Физматгиз, 1962, с.340м
Изобретение относится к космической технике, а более конкретно, к бортовым средствам терминального управления разгонных блоков с нерегулируемыми маршевыми ракетными двигателями. Предлагаемая система содержит последовательно соединенные измеритель кажущегося ускорения, определитель обратной величины и первый интегратор, подключенный к первому входу вычислителя условного времени сгорания массы разгонного блока. Предусмотрен также счетчик времени, подключенный выходом через временной сумматор ко второму входу указанного вычислителя, и счетчик тактов, выход которого подключен к третьему входу вычислителя. Дополнительно система содержит счетчик мерных интервалов, умножитель, второй интегратор и делитель. Выход указанного счетчика тактов через последовательно соединенные счетчик мерных интервалов, умножитель и второй интегратор подключен к первому входу делителя, а второй выход счетчика мерных интервалов соединен со вторым входом делителя. Выход вычислителя условного времени сгорания массы разгонного блока соединен со вторым входом умножителя. Данное исполнение системы обеспечивает снижение влияния разброса характеристик ракетного двигателя на процесс управления. Изобретение направлено на повышение точности и быстродействия вычисления времени отсечки двигателя разгонного блока и определения на его основе траектории движения этого блока. 5 ил.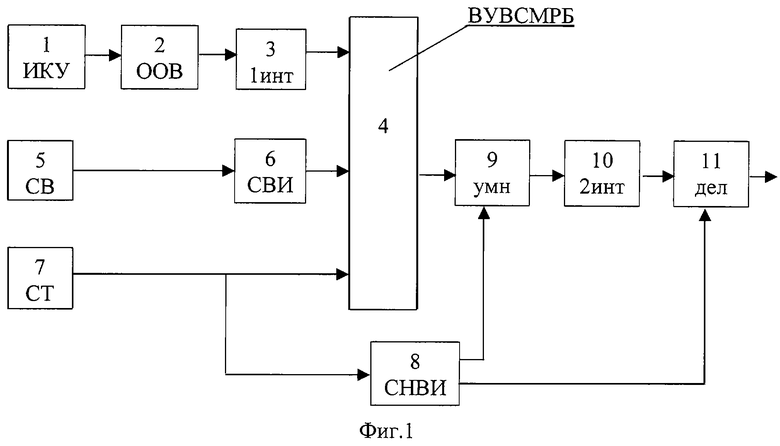
Система идентификации условного времени сгорания массы разгонного блока, содержащая последовательно соединенные измеритель кажущегося ускорения, определитель обратной величины, первый интегратор и вычислитель условного времени сгорания массы разгонного блока, счетчик времени, выход которого через сумматор времен измерений подключен ко второму входу вычислителя условного времени сгорания массы разгонного блока, и счетчик тактов, выход которого подключен к третьему входу указанного вычислителя, отличающаяся тем, что она содержит счетчик мерных интервалов, умножитель, второй интегратор и делитель, причем выход указанного счетчика тактов через последовательно соединенные счетчик мерных интервалов, умножитель и второй интегратор подключен к первому входу делителя, второй выход счетчика мерных интервалов соединен со вторым входом делителя, а выход вычислителя условного времени сгорания массы разгонного блока соединен со вторым входом умножителя.
| СЫРОВ А.С., СОКОЛОВ В.Н | |||
| и др | |||
| Алгоритм наведения разгонного блока с нерегулируемым маршевым двигателем и малой тяговооруженностью | |||
| - Авиакосмическая техника и технология, 1998, №1, с.31-33 | |||
| В.П.ПЕТРОВ, А.А.СОЧИВКО | |||
| Управление ракетами | |||
| - М.: Воениздат, 1963, с.143-145 | |||
| RU 94029548 А1, 20.06.1996 | |||
| US 4470562 А, 11.09.1984. |
