Изобретение относится к способам управления угловым движением подвижных объектов и может быть использовано в системах ориентации космических аппаратов.
Известен способ торможения угловой скорости космического аппарата при поканальном принципе управления. Согласно этому принципу управляющие моменты прикладываются к космическому аппарату относительно трех жестко связанных с ним осей. Характерной особенностью данного принципа управления является раздельное формирование закона управления по каждой оси [1, 2].
Наиболее близким к предлагаемому является способ торможения угловой скорости космического аппарата с осесимметричным тензором инерции, в соответствии с которым измеряют угловые скорости космического аппарата вокруг его строительных осей, создают управляющие моменты вокруг строительных осей космического аппарата, определяют величину максимального ускорения, создаваемого управляющим моментом вокруг первой оси космического аппарата, по найденному значению максимального ускорения определяют время торможения космического аппарата, исходя из обеспечения условия максимума быстродействия, управляющий момент вокруг первой оси создают, чтобы обеспечить торможение космического аппарата вокруг первой оси с максимальным ускорением [3].
Целью изобретения является повышение быстродействия торможения угловой скорости космического аппарата.
Указанная цель достигается за счет использования инерционного момента, возникающего при одновременном вращении космического аппарата вокруг его строительных осей, в качестве дополнительного тормозящего момента.
Сущность изобретения заключается в том, что дополнительно определяют величины максимальных ускорений, создаваемых управляющими моментами вокруг второй и третьей осей космического аппарата, определяют требуемое направление вращения космического аппарата вокруг третьей оси, создают вращение вокруг второй и третьей осей космического аппарата, исходя из обеспечения торможения космического аппарата вокруг первой оси за счет инерционного момента, формируют управляющий момент вокруг второй и третьей осей космического аппарата исходя из того, чтобы обеспечить разгон и торможение вокруг этих осей с максимальным ускорением, осуществляют определение времени торможения космического аппарата, длительности интервалов разгона вокруг второй и третьей осей с учетом вращения космического аппарата вокруг второй и третьей осей и найденных значений максимальных ускорений вокруг второй и третьей осей космического аппарата.
Принцип работы заключается в следующем.
Рассмотрим систему дифференциальных уравнений Эйлера, описывающую вращательное движение космического аппарата: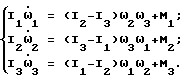
где I1, I2, I3 - моменты инерции относительно строительных осей;
ω1,ω2,ω3 - угловые скорости относительно соответствующих осей;
М1, М2, М3 - управляющие моменты.
Из анализа этих уравнений следует, что при торможении угловой скорости космического аппарата вокруг одной из осей при отсутствии вращения вокруг двух других величина  определяется только величиной управляющего момента Мi, i = 1, 2, 3.
определяется только величиной управляющего момента Мi, i = 1, 2, 3.
При одновременном вращении космического аппарата относительно двух других осей возникает инерционный момент M
M
где индекс задается циклической перестановкой i = 1, 2, 3.
При этом путем выбора направления вращения космического аппарата вокруг соответствующих строительных осей с учетом знака разности моментов инерции относительно этих осей создается угловое ускорение  и, как следствие, достигается сокращение времени торможения.
и, как следствие, достигается сокращение времени торможения.
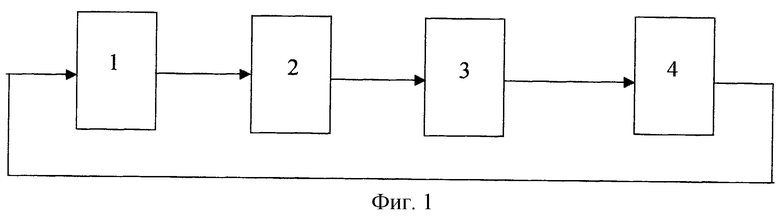
Структурная схема системы ориентации космического аппарата приведена на фиг. 1 [1] , где 1 - датчики, 2 - цифровая вычислительная машина (ЦВМ), 3 - контур исполнительных органов (КИО), 4 - космический аппарат.
Задача управления торможением космического аппарата заключается в обеспечении нулевой угловой скорости ωi в конце расчетного времени торможения T0,
ωi(T0) = 0, при ωi(0) ≠ 0,
ωi+1(0) = ωi+2(0) = 0.
В соответствии с предложенным способом измеренные датчиками 1 значения угловых скоростей ωi вводятся в алгоритм расчета программы формирования управляющих моментов Мi, реализуемый ЦВМ 2. Этот алгоритм включает алгоритм определения величин максимальных ускорений Ui max, i = 1, 2, 3, алгоритм определения требуемого направления вращения космического аппарата вокруг i + 2 оси в соответствии с правилом:
ωi+2>0, если ωi(0)>0,(Ii+1-Ii+2)<0 или если ωi(0)<0,(Ii+1-Ii+2)>0,
ωi+2<0 если ωi(0)>0,(Ii+1-Ii+2)>0 или если ωi(0)<0,(Ii+1-Ii+2)<0,
и алгоритм расчета времени торможения Т и длительностей интервалов разгона вокруг второй t2p и третьей t3p осей космического аппарата путем решения системы уравнений: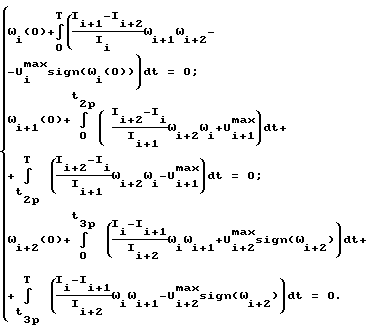
По сигналам управления от ЦВМ 2 КИО 3, формирует управляющие моменты Mi, i = 1, 2, 3 в соответствии с выражениями:
Mi = -M
Mi+1=Mi+1 0sign(t2p-t);
Mi+2 = M
где Мi 0=const>0, i = 1, 2, 3, t∈[0,T°].
При номинальных параметрах системы управления, обеспечивается торможение космического аппарата за расчетное время Т0. Предлагаемый способ позволяет повысить быстродействие, точность и надежность систем ориентации космических аппаратов.
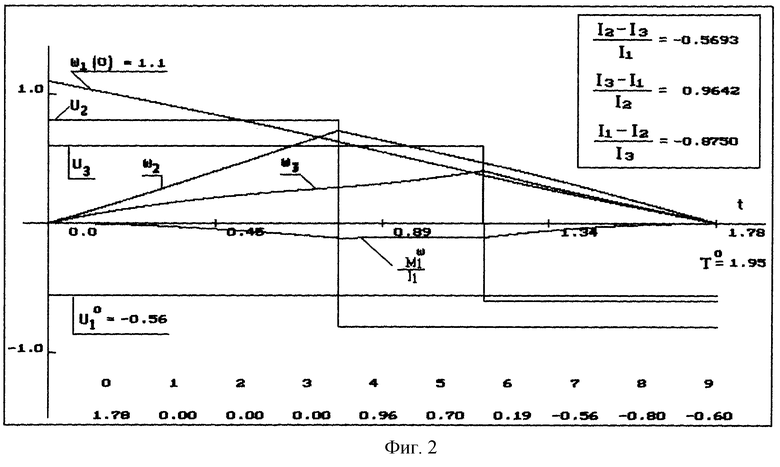
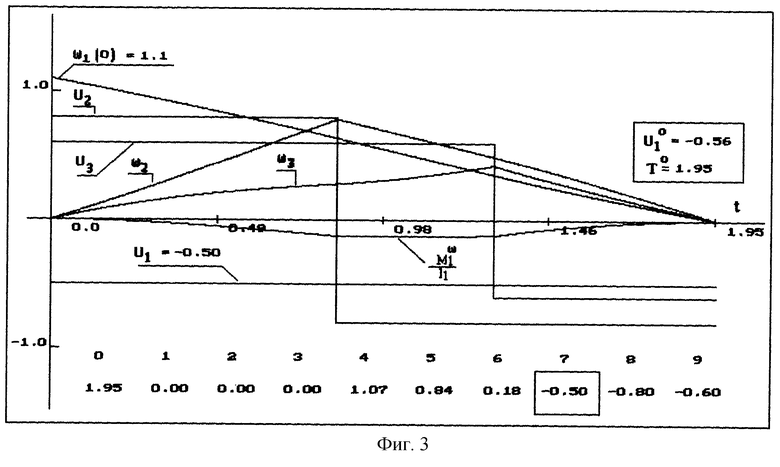
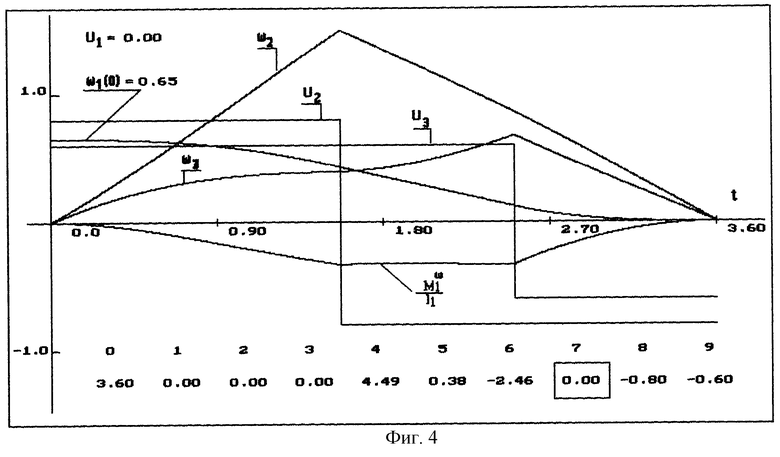
На фиг. 2-4 приведены графики процессов торможения космического аппарата.
На фиг. 2 приведены результаты численного моделирования процесса торможения космического аппарата при номинальном значении тяги двигателей ориентации. Видно, что использование инерционного момента позволяет уменьшить время торможения космического аппарата.
На фиг. 3 изображены графики торможения угловой скорости при значении тяги двигателя меньше номинальной. В этом случае инерционный момент компенсирует снижение тяги. Точность управления повышается.
На фиг. 4 изображены графики процесса торможения при отказе двигателя в канале торможения. Система остается работоспособной при отказах двигателей ориентации по выбранному каналу.
Источники информации
1. Алексеев К.Б. Экстенсивное управление ориентацией космических летательных аппаратов. М.: Машиностроение, 1977, с. 3-5.
2. Алексеев К.Б., Бебенин Г.Г. Управление космическими летательными аппаратами. М.: Машиностроение, 1974, с. 19-22.
3. Раушенбах Б.В., Токарь Е.Н. Управление ориентацией космических аппаратов. М., Наука, 1974, с. 191-193.
Изобретение относится к способам управления угловым движением, в частности к системам ориентации космических аппаратов (КА). Согласно предлагаемому способу, измеряют угловые скорости и создают управляющие моменты вокруг строительных осей КА. При этом определяют величину максимального ускорения КА вокруг первой оси и соответствующее ему время торможения КА. Создают управляющий момент, обеспечивающий торможение КА вокруг первой оси с максимальным ускорением. Дополнительно определяют величины максимальных ускорений, создаваемых управляющими моментами вокруг второй и третьей осей КА. Создают такое вращение КА вокруг второй и третьей осей, которое обеспечивало бы торможение КА вокруг первой оси за счет действующего на эту ось инерционно-гироскопического момента от указанных второй и третьей осей. Причем управляющие моменты вокруг второй и третьей осей КА формируют исходя из того, чтобы обеспечить разгон и торможение КА вокруг этих осей с максимальным ускорением. Определяют время торможения КА, а также длительности участков разгона вокруг второй и третьей осей. При этом учитывают вращение КА и найденные значения максимальных ускорений вокруг данных осей КА. Изобретение направлено на повышение быстродействия процесса торможения вращения КА. 4 ил.
Способ торможения угловой скорости космического аппарата, в соответствии с которым измеряют угловые скорости космического аппарата вокруг его строительных осей, создают управляющие моменты вокруг строительных осей космического аппарата, определяют величину максимального ускорения, создаваемого управляющим моментом вокруг первой оси космического аппарата, по найденному значению максимального ускорения определяют время торможения космического аппарата исходя из обеспечения максимального быстродействия, создают управляющий момент вокруг первой оси таким, чтобы обеспечить торможение космического аппарата вокруг этой оси с максимальным ускорением, отличающийся тем, что дополнительно определяют величины максимальных ускорений, создаваемых управляющими моментами вокруг второй и третьей осей космического аппарата, определяют требуемое направление вращения космического аппарата вокруг третьей оси, создают вращение вокруг второй и третьей осей космического аппарата исходя из обеспечения торможения космического аппарата вокруг первой оси за счет возникающего от двух других осей инерционного момента:
M
где I2, I3 и ω2, ω3 - соответственно моменты инерции и угловые скорости космического аппарата относительно второй и третьей строительных осей космического аппарата,
формируют управляющие моменты вокруг второй и третьей осей космического аппарата исходя из того, чтобы обеспечить разгон и торможение вокруг этих осей с максимальным ускорением, определяют время торможения космического аппарата, а также длительности интервалов разгона вокруг второй и третьей осей с учетом вращения космического аппарата и найденных значений максимальных ускорений вокруг данных осей космического аппарата.
| РАУШЕНБАХ Б.В., ТОКАРЬ Е.Н | |||
| Управление ориентацией космических аппаратов: - М.: Наука, 1974, с | |||
| Устройство непрерывного автоматического тормоза с сжатым воздухом | 1921 |
|
SU191A1 |
| АЛЕКСЕЕВ К.Б | |||
| Экстенсивное управление ориентацией космических летательных аппаратов | |||
| - М.: Машиностроение, 1977, с.3-5 | |||
| СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА С УПРУГИМИ ВЫНОСНЫМИ ЭЛЕМЕНТАМИ, СМЕЩЕННЫМИ ОТ ОСИ ЕГО СТАБИЛИЗАЦИИ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1981 |
|
SU1099548A1 |
| СПОСОБ УПРАВЛЕНИЯ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА | 1994 |
|
RU2093433C1 |
| СПОСОБ ПОЛУЧЕНИЯ КИСЛОМОЛОЧНОГО ПРОДУКТА С ПРИРОДНЫМ ВИТАМИНОМ К2 (ВАРИАНТЫ) И КИСЛОМОЛОЧНЫЙ ПРОДУКТ, ПОЛУЧЕННЫЙ ДАННЫМ СПОСОБОМ | 2014 |
|
RU2583873C1 |

