Изобретение относится к космонавтике и, в частности к способам и устройствам демпфирования колебательного движения космического аппарата (КА) относительно центра масс.
Известен способ демпфирования упругих колебаний выносных элементов КА, в частности панелей солнечных батарей (СБ), включающий приложение к корпусу КА демпфирующего момента упруговязкой природы. Устройство для осуществления данного способа содержит гироскопический исполнительный орган с ориентированным вдоль оси тангажа вектором кинетического момента, установленный на борту КА в упруговязком подвесе. Указанные способ и устройство позволяют обеспечить эффективное гашение колебаний выносных элементов по осям крена и рысканья.
Недостатком известных способа и устройства является трудность успокоения колебаний упругих элементов (СБ) КА в канале тангажа, особенно при малом конструкционном демпфировании этих элементов и наличии резонанса (совпадении собственной частоты СБ с частотой изменения управляющего момента для стабилизации КА по тангажу). Отмеченная трудность в существенной мере обусловлена типичной для многих КА компоновкой выносных элементов попарно симметрично одной из плоскостей стабилизации КА и совпадением упругоинерционных характеристик (УИХ) элементов друг с другом в каждой паре.
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является способ стабилизации углового движения КА с упругими выносными элементами, смещенными от оси его стабилизации, включающий приложение к корпусу аппарата демпфирующего воздействия, измерение параметров колебаний и изменение УИХ этих элементов до получения заданных параметров затухания колебаний аппарата в плоскости стабилизации, перпендикулярной указанной оси.
Наиболее близким к изобретению устройством для стабилизации углового движения КА является устройство, содержащее установленные на корпусе аппарата упругие выносные элементы со средствами регулирования их УИХ, а также - средство для гашения колебаний корпуса аппарата.
Недостатком известных способа и устройства является относительно низкое быстродействие процесса демпфирования колебаний корпуса КА в плоскости стабилизации по тангажу, что вызвано ограничением на допустимую величину диссипативных характеристик в данном канале исходя из требований точности стабилизации КА. Удовлетворение противоречивых требований по точности стабилизации и быстродействию в особенности при малом конструкционном демпфировании выносных элементов, ведет к существенному усложнению системы управления угловым движением КА.
Целью изобретения является повышение быстродействия и упрощение процесса стабилизации преимущественно при малом конструкционном демпфировании выносных элементов за счет обеспечения перехода энергии упругих колебаний выносных элементов в каналы с наименьшим влиянием диссипативных характеристик этих каналов на угловое движение аппарата в плоскости стабилизации.
Указанная цель достигается тем, что в известном способе, включающем приложение к корпусу КА демпфирующего воздействия измерение параметров колебаний, изменение УИХ выносных элементов до получения заданных параметров затухания колебаний аппарата в плоскости стабилизации, перпендикулярной указанной выше оси размещают упругие выносные элементы вне плоскости стабилизации, изменение УИХ выносных элементов производят путем увеличения разности значений этих характеристик, а демпфирующее воздействие прикладывают относительно расположенной в плоскости стабилизации оси, по которой составляющая колебаний выносных элементов отлична от нуля.
При этом изменяют изгибную жесткость выносных элементов без изменения геометрической формы и расположения данных элементов относительно корпуса аппарата.
Кроме того, в другом варианте выносные элементы с плоскостью изгиба, параллельной плоскости стабилизации, размещают симметрично оси, перпендикулярной плоскости стабилизации, а демпфирующее воздействие прикладывают относительно оси, параллельной линии, соединяющей центры масс выносных элементов.
В альтернативном варианте выносные элементы с плоскостью изгиба, перпендикулярной плоскости стабилизации, размещают симметрично плоскости стабилизации, а демпфирующее воздействие прикладывают относительно оси, перпендикулярной плоскости изгиба.
Кроме того, изменение УИХ выносных элементов могут осуществлять и путем разворота элементов с анизотропной жесткостью друг относительно друга и корпуса аппарата.
В другом варианте способа измеряют и сравнивают между собой амплитуды углового движения корпуса КА в плоскости стабилизации и по оси демпфирования, а разность значений УИХ элементов увеличивают до достижения равенства сравниваемых амплитуд.
Устройство для стабилизации углового движения КА, содержащее установленные на корпусе КА упругие выносные элементы со средствами регулирования их УИХ, а также средство для гашения колебаний корпуса аппарата, отличается от известного тем, что в нем упругие выносные элементы размещены вне плоскости стабилизации аппарата, а средство для гашения колебаний выполнено в виде демпфера колебаний корпуса аппарата относительно оси, лежащей в плоскости стабилизации, причем выносные элементы ориентированы относительно корпуса аппарата с обеспечением непринадлежности оси демпфирования на одной из плоскостей изгиба этих элементов.
При этом устройство может содержать измерители параметров колебаний корпуса аппарата в плоскости стабилизации и относительно оси демпфирования, а также блок сравнения, связанный с измерителями и - через преобразователь сигнала - со средствами регулирования УИХ выносных элементов.
На фиг. 1-4 схематически представлены КА, на которых могут быть реализованы способ и устройство согласно изобретению; на фиг. 5 - дан пример системы регулирования УИХ выносных элементов (панелей СБ) в составе системы стабилизации КА (по варианту изображенному на фиг. 3-4).
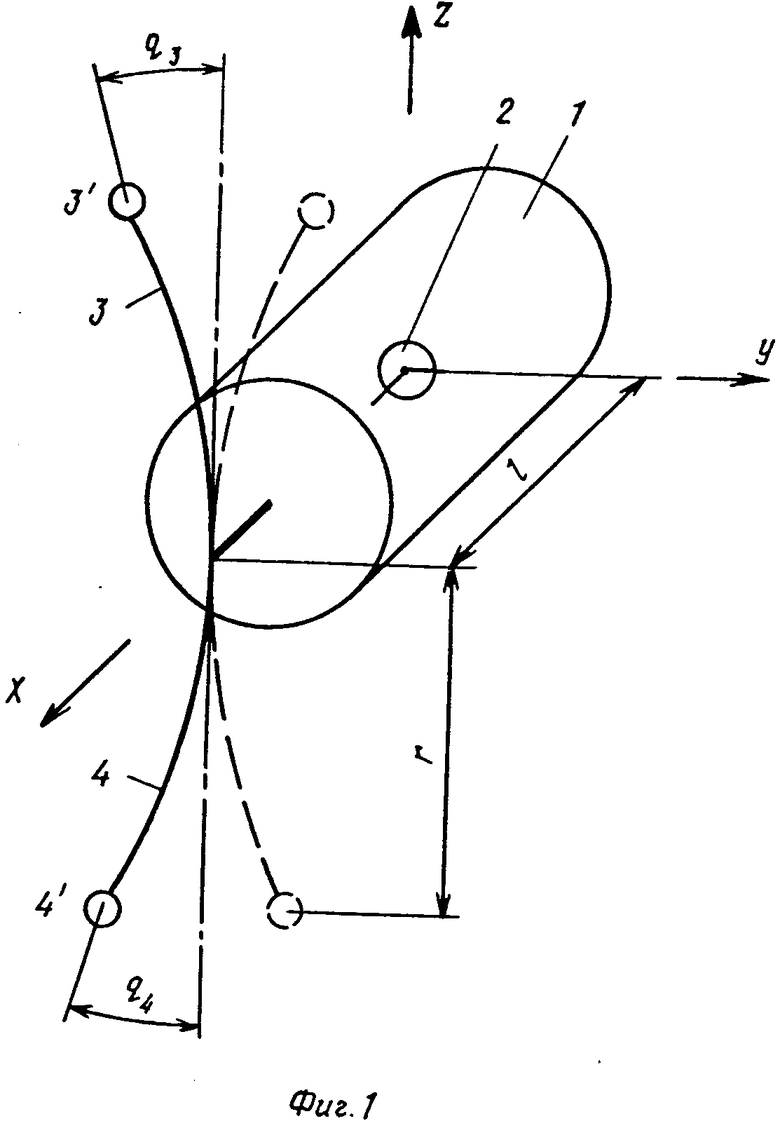
В корпусе КА 1, который условно считается твердым телом, установлен блок 2 демпфирования угловой скорости КА относительно поперечной оси (например, гиросиловой стабилизатор с осью вращения в неотклоненном положении, совпадающей с продольной осью КА, связанный с корпусом аппарата через вязкую - демпфирующую - связь, или датчик угловой скорости движения КА относительно поперечной оси, связанный с усилителем-преобразователем демпфирующего исполнительного органа, создающего управляющий момент вокруг оси измерения). Штанги 3 и 4 выносных элементов, обладающие конечной жесткостью, связаны концами с траверсами 5, 6, 7 и 8, также имеющими конечную жесткость на изгиб. При этом траверсы 5 и 6 расположены симметрично относительно оси штанги 3, а траверсы 7 и 8 - оси штанги 4. Штанги 3 и 4 симметричны плоскости XY. Точечные массы 3', 4',5',6',7' и 8', установленные на концах траверс, моделируют различные элементы оборудования КА (например, массивы СБ, датчики и т.д.).
XYZ - Система координат, связанная с КА, начало которой совпадает с центром масс аппарата, Х - поперечная ось рыскания), Y - поперечная ось (ось крена), Z - продольная ось (ось тангажа); q3, q4, q5, q6, q7 и q8 - упругие отклонения соответствующих элементов 3, 4, 5, 6, 7, 8, отсчитываемые от их положения в недеформированном состоянии; за положительное направление отклонения принимается поворот против часовой стрелки, если смотреть со стороны положительной полуоси системы координат XYZ.
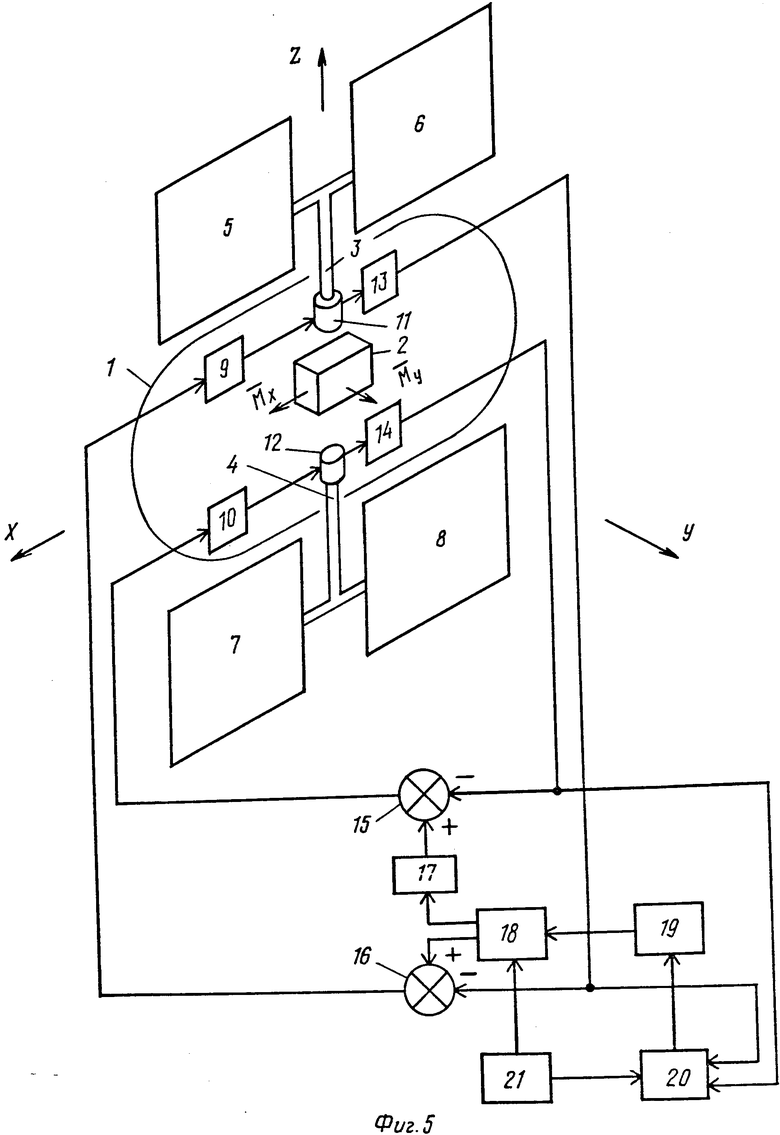
Система регулирования УИХ выносных элементов (см. фиг. 3 и 4) содержит (см. фиг. 5) первый 9 и второй 10 усилители-преобразователи первого 11 и второго 12 исполнительных механизмов поворота (изменения жесткости или момента инерции) выносных симметричных элементов; первый 13 и второй 14 датчики углов поворота (жесткостей или моментов инерции, пропорциональных углу разворота) выносных симметричных элементов; первый 15 и второй 16 элементы сравнения; инвертор 17 напряжения для обеспечения противоположных направлений разворотов при одновременном повороте обоих выносных элементов; коммутатор 18, обеспечивающий подключение задатчика угла относительного разворота 19 одного элемента относительно другого или к входу первого элемента сравнения, или к входу второго элемента сравнения (через инвертор), или одновременно к входам первого и второго элементов сравнения; блок 20 определения расчетного угла разворота одного элемента относительно другого для обеспечения неравенства периодов свободных колебаний указанных выносных симметричных элементов; блок 21 управления относительным разворотом (расчетным отношением периодов свободных колебаний) выносных симметричных элементов.
Способ стабилизации углового движения КА реализуется при работе описанного устройства следующим образом. При приложении управляющего момента вокруг оси Z (см. фиг. 1) корпус КА начинает равноускоренно поворачиваться в направлении действия этого момента. Ввиду смещения штанг 3 и 4 от оси вращения КА Z к точечным массам 3' и 4' прикладываются инерционные силы, вызывающие упругие отклонения штанги 3 на угол q3 и штанги 4 на угол q4. При равной величине жесткости и моментов инерции указанных симметричных элементов выполняется равенство q3=-q4. Такие колебания, напоминающие по форме латинскую букву U, будем называть U-образными. U-образные упругие колебания штанг 3 и 4, совершаемые параллельно плоскости YZ, ввиду симметричности их инерционно-жесткостных характеристик (следовательно, и периодов их свободных колебаний) вызывают упругое движение корпуса КА 1 только вокруг продольной оси. При совпадении частоты знакопеременного управляющего воздействия с частотой свободных колебаний упругих элементов в рассматриваемом примере, согласно линейной теории, амплитуда колебаний стремится к неограниченному возрастанию (конструкционное демпфирование считается нулевым).
Согласно изобретению определяют и сравнивают между собой периоды свободных колебаний симметричных выносных элементов 3 и 4. При равенстве измеряемых периодов или их разности, меньшей расчетной величины, изменяют жесткость или (и) момент инерции одного из элементов (или обоих элементов). На практике предпочтительней изменять жесткость, так как изменение моментов инерции приводит к появлению центробежных моментов инерции и "перекосу" центральных осей инерции КА, что в свою очередь вызывает повышенный расход рабочего тела на поддержание ориентации, ухудшает точность, усложняет управление ориентацией КА.
Изменение жесткости можно выполнить путем изменения силы натяжения троса, обеспечивающего внецентренное сжатие указанного элемента, введения специального упругого шарнира, а также предварительным выбором материала с разной жесткостью для каждого из элементов или выбором площади сечения элементов и т.п. Изменение момента инерции обеспечивается любым известным способом, например изменением длины штанги. Если штанга имеет различную жесткость в различных направлениях, то изменить период колебаний возможно дополнительным поворотом одной из штанг относительно другой; этой же цели будут способствовать дополнительно установленные на одной из штанг ребра жесткости, предварительное напряжение конструкции, применение регулируемого упругого элемента, например витой пружины, один конец которой жестко связан с штангой, а другой - кинематически, с возможностью поворота и фиксации после ее закручивания.
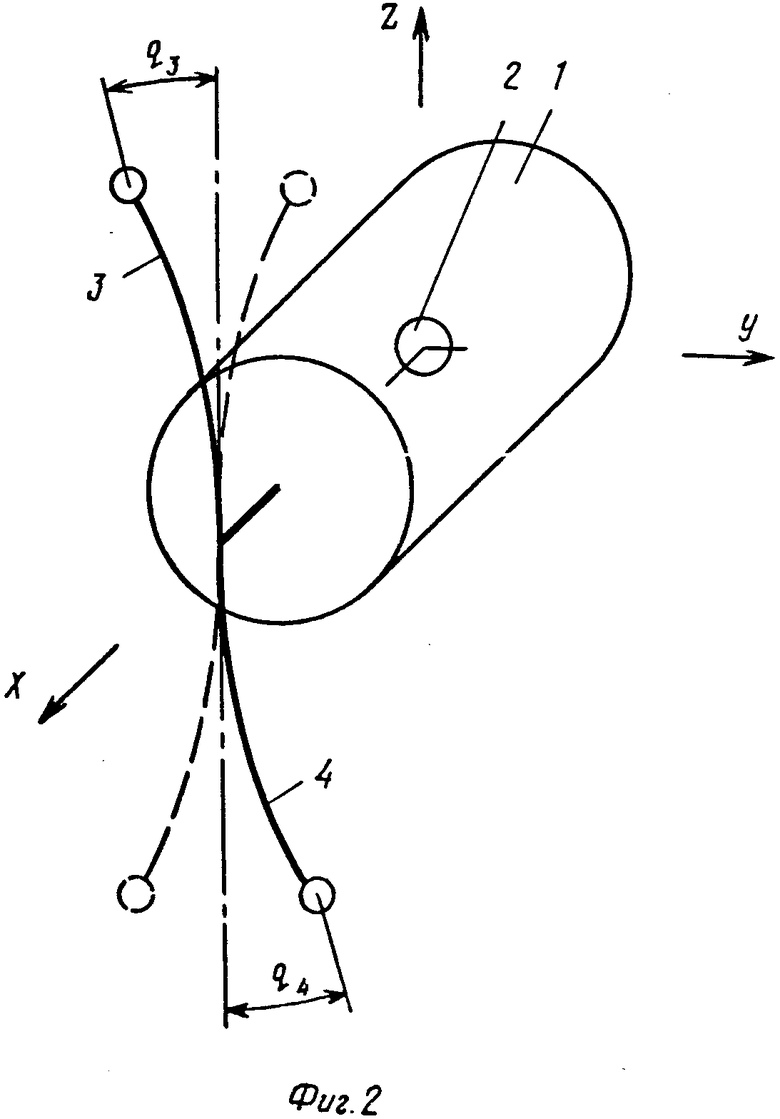
После достижения расчетной разности периодов колебаний симметричных упругих элементов происходит следующее. Из-за разной частоты колебаний штанг 3 и 4 с течением времени U-образная форма колебаний (см. фиг. 1) переходит в S-образную (см. фиг. 2), т.е. конфигурация при изгибе штанг напоминает латинскую букву S, когда штанги 3 и 4 отклонены в разные стороны от положения в недеформированном состоянии. В этом случае упругий момент прикладывается к корпусу КА, уже вокруг поперечной оси Х, вызывая гармоническое угловое его движение по каналу рыскания.
Для демпфирования упругого движения относительно поперечной оси формируются и прикладываются к КА демпфирующие управляющие воздействия в функциональной зависимости от угловой скорости аппарата вокруг этой оси. Указанное воздействие гасит энергию упругих колебаний СБ, генерируемых управляющими моментами вокруг продольной оси. Выполнение операции по демпфированию углового движения КА вокруг поперечной оси может реализоваться как непосредственным измерением скорости, например, датчиком угловой скорости с последующим фоpмированием управляющего момента, пропорционального этой скорости, посредством исполнительного органа, так и косвенным определением угловой скорости с одновременным формированием демпфирующего воздействия, например, с помощью инерционной массы, связанной с корпусом КА через демпфирующий блок. В качестве такого "демпфера" может быть использован гиромаховичный исполнительный орган (одновременно используемый для управления ориентацией КА по каналам крена и рыскания), снабженный демпфирующей связью с корпусом аппарата. Таким образом, благодаря введению жесткостной асимметрии симметричных элементов конструкции КА обеспечивается "перекачка" энергии упругих колебаний с продольной на поперечную ось, при этом не нарушается инерционная симметрия КА как "абсолютно твердого" тела.
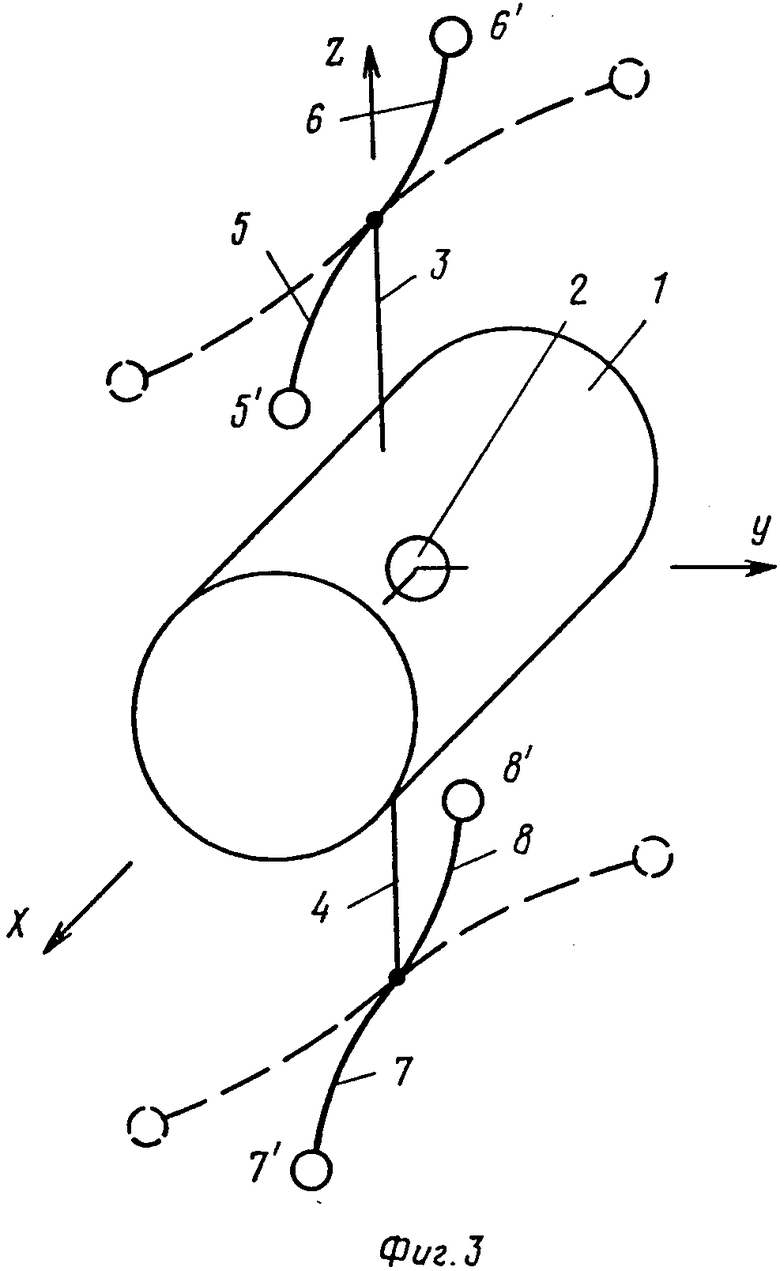
Процесс, аналогичный описанному, имеет место и для КА с упругими выносными элементами, изображенными на фиг. 3. Как и ранее, штанги 3 и 4 совпадают с осью Z, вокруг которой происходит угловое движение КА и колебания СБ при приложении к аппарату управляющих моментов для устранения отклонений по тангажному каналу.
В этом случае при равенстве жесткостей траверс 5, 6, 7 и 8, а также штанг 3 и 4 упругие отклонения точечных масс на концах траверс q5=q6=q7=q8, т. е. если смотреть со стороны оси Z, колебания напоминают по форме латинскую букву S(S=образные колебания), плоскость которой параллельна плоскости XY. Так как периоды колебаний симметричных элементов 5, 6 и 7 и 8,3 и 4 равны, то упругое движение корпуса КА совершается только вокруг продольной оси. Как и раньше, при совпадении частот упругих колебаний и управляющего воздействия вокруг оси Z по линейной теории амплитуда колебаний неограниченно возрастает и вызывает неустойчивость по каналу тангажа.
Согласно изобретению изменяют жесткость траверс 5 и 8. Пусть жесткость элемента 5 равна жесткости антисимметричного ему элемента 8, а жесткость элемента 6 равна жесткости антисимметричного элемента 7, причем жесткости элементов 5 и 6, 7, и 8 выбраны так, чтобы обеспечить расчетную разность периодов свободных колебаний указанных элементов. Тогда будет выполняться q5=q8, q6=q7 и с течением времени S-образные колебания траверс (см. фиг. 3) перейдут в U-образные (см. фиг. 4). При этом появятся колебания штанг 3 и 4 S-образной формы. Теперь от упругих колебаний панелей СБ, возникших при движении вокруг продольной оси Z (тангажа), прикладывается упругий момент к корпусу КА вокруг поперечной оси, который в свою очередь приводит к появлению гармонического углового движения КА по каналу рыскания и (или) крена в зависимости от положения СБ относительно корпуса аппарата, Демпфирующий блок 2 гасит угловые скорости КА вокруг поперечной оси, уменьшая амплитуду колебаний выносных элементов. Итак, данный способ и в рассмотренном случае обеспечивает "перекачку" энергии упругих колебаний с продольной на поперечную ось, следовательно, и гашение этих колебаний.
В зависимости от углового положения выносных элементов относительно КА демпфирующее воздействие можно прикладывать как вокруг оси крена, рыская (т. е. вокруг одной из этих осей), так и одновременно вокруг обеих этих осей. В общем случае, когда выносные упругие элементы вращаются вокруг продольной оси, например, при отслеживании панелями СБ направления на Солнце, достаточно формировать и прикладывать демпфирующее воздействие только вокруг одной оси, так как колебания элементов вокруг "незадемпфированной" поперечной оси в процессе поворота переходят на другую, "задемпфированную" ось.
Эффективность демпфирования при этом снижается пропорционально времени полного оборота панелей, но упругие колебания остаются ограниченными.
В процессе стабилизации КА система регулирования УИХ выносных элементов (см. фиг. 5) работает следующим образом. По сигналу на выходе блока 21, формируемого, например, включением двигателя коррекции орбиты или перед выполнением космонавтами физических упражнений, коммутатор 18 подключает задатчик 19 к входу (ам) элемента (ов) сравнения 15(16) или одновременно к входам обоих элементов сравнения или к входу одного из них, а блок определения отношения периодов колебаний 20 выполняет расчет, используя информацию об инерционно-жесткостных характеристик КА, демпфирующих характеристиках блока 2 и текущих параметрах о положении выносных элементов с выходов датчиков 13 и 14. Результат расчета преобразуется в величину требуемого угла относительного разворота выносных элементов, которая запоминается в задатчике 19. Сигнал на выходе задатчика 19 вызывает появление сигнала (ов) рассогласования на выходе (ах) элемента (ов) сравнения 15 (16), который (ые) отрабатывается (ются) исполнительным (и) механизмом (ами) 12(11).
Далее, по окончании режима коррекции и физических упражнений возможно формирование нулевого сигнала на выходе задатчика, т.е. возращение системы в исходное состояние.
Таким образом, использование изобретения позволит относительно простыми средствами повысить эффективность стабилизации углового движения широкого класса КА с упругими выносными элементами, сократив тем самым затраты на создание высокоточных систем управления движением КА вокруг центра масс.
Кроме того, возможно повышение долговечности конструкции выносных элементов, так как применение предлагаемых способа и устройства позволяет уменьшить по сравнению с прототипами амплитуду циклов напряжений этих элементов в процессе их упругих колебаний.

| Авторское свидетельство СССР N 736524, кл | |||
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
