Изобретение относится к управлению движущимися объектами и может быть использовано для управления движением объектов с произвольными инерционными свойствами (например, летательными аппаратами) около центра масс.
Целью изобретения является уменьшение затрат рабочего тела на организацию пространственного разворота объекта при действии возмущений.
На фиг.1 приведена блок-схема предлагаемой системы; на фиг.2 - функциональная схема блока идентификации возмущений; на фиг.З - функциональная схема блока анализа знака возмущающего момента; на фиг.4 - функциональная схема инвертора- коммутатора; на фиг.5-функциональная схема блока формирования поправок; на фиг.б - функциональная схема блока сравнения скоростей; на фиг.7 - функциональная схема блока формирования управляющих сигналов; на фиг.8 - функциональная схема блока оценки инерционного момента; на фиг.9 (а,б) - графики изменения параметров расчетного углового разворота и при Мв О ( ); на Фиг-10 графики изменения параметров углового разворота при Мв О ( ): на Фиг-11 графики изменения параметров углового разворота при Мв О ( ф ); на фиг. 12 - графики изменения параметров углового разворота при Мв О
(Ф ФР )
Блок-схема системы автоматического управления пространственным разворотом объекта (фиг.1) содержит блок 1 формирования управляющих сигналов, блок 2 исполнительных органов, объект 3 управления, блок 4 датчиков угловой скорости, блок 5 формирования квадрата нормы вектора угловой скорости, блок 6 формирования переменной составляющей сигнала управления, блок 7 формирования сигнала отклонения оси вращения от заданного направления, усилитель 8, сумматор 9, блок 10 оценки инерционного момента, блок 11 идентифи- кации возмущающего момента, блок 12 анализа знака возмущающего момента, инвертор-коммутатор-13, блок 14 формирования поправок, блок 15 сравнения скоростей, блок 16 сравнения углов и блок 17 интегрирования нормы вектора угловой скорости.
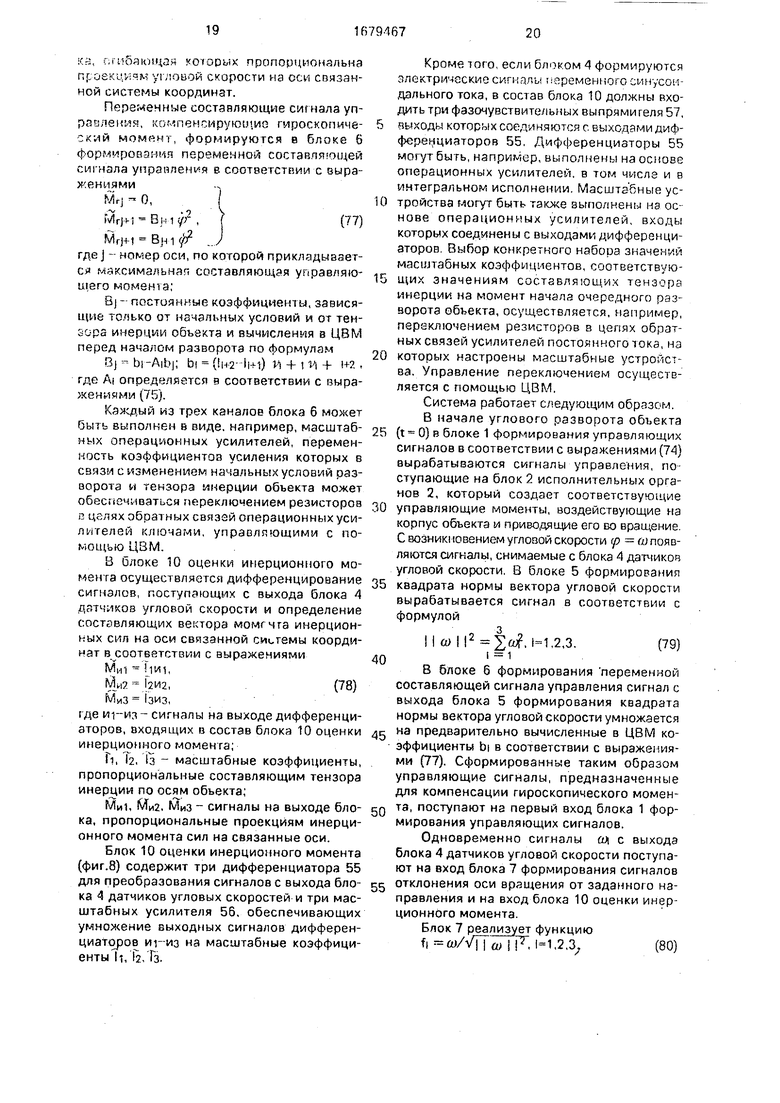
Блок 11 идентификации возмущений
(фиг.2) состоит из трех одинаковых каналов
18,которые могут быть выполнены, например, в виде трехвходового сумматорэ-вычи- тателя.
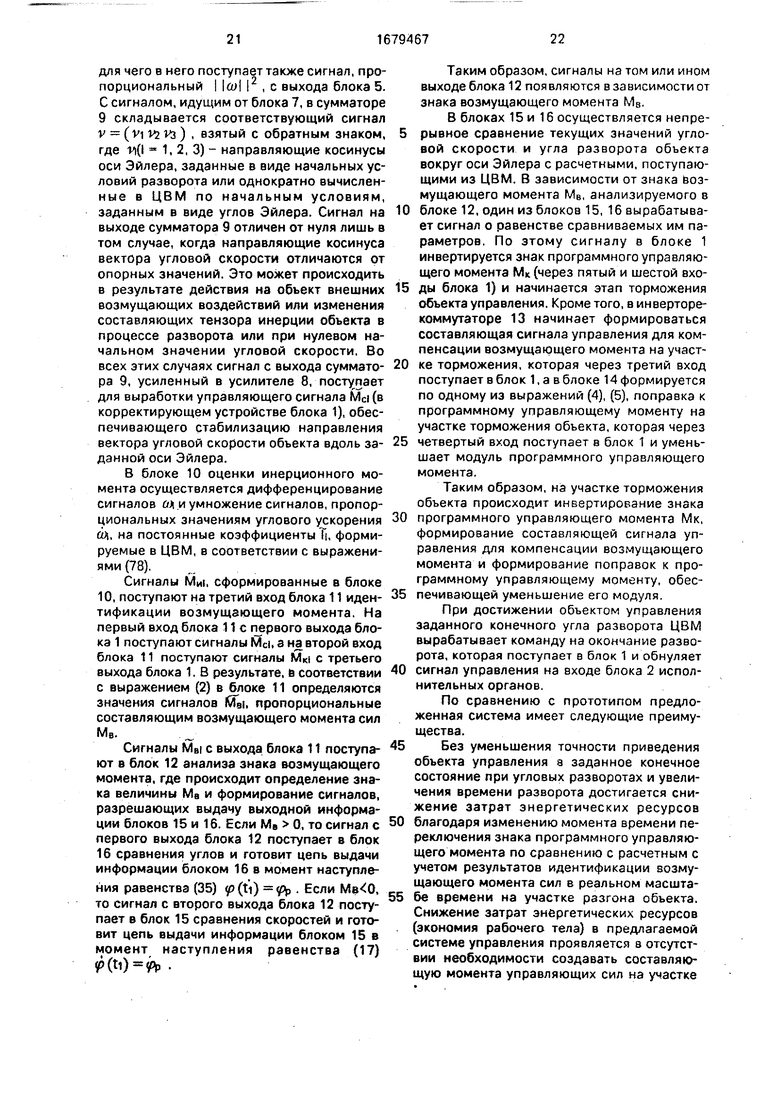
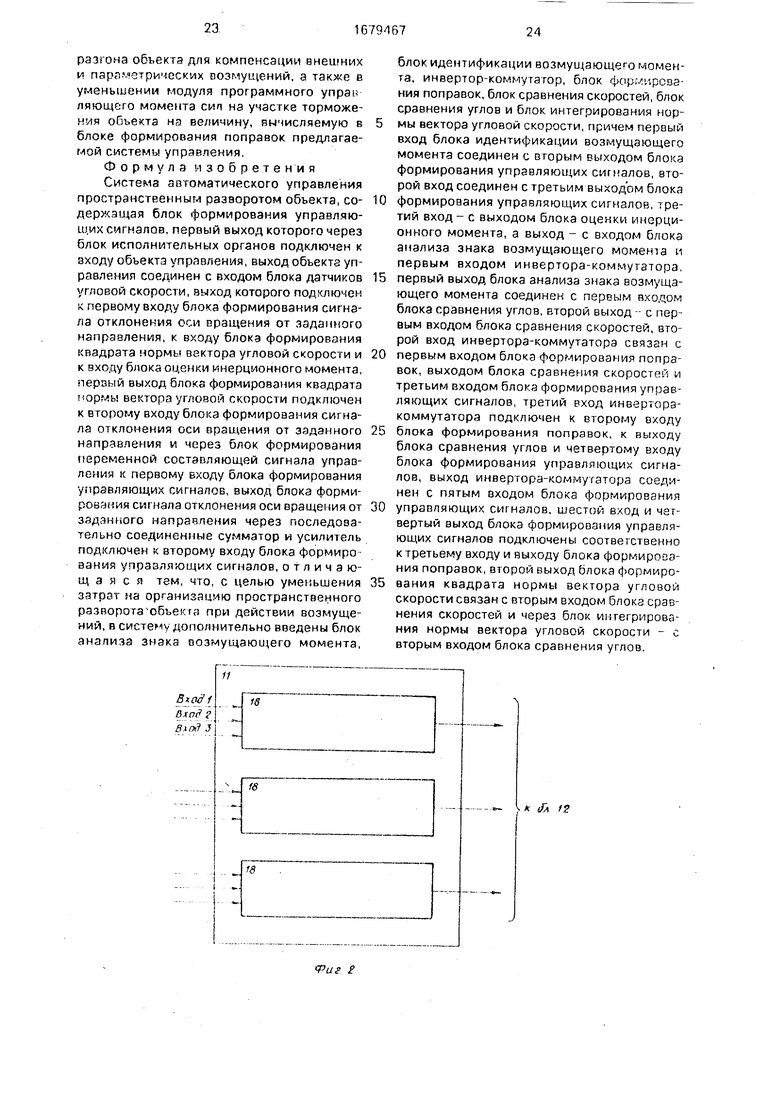
Блок 12 анализа знака возмущения
(фиг.З) состоит из трех одинаковых каналов
19,которые могут быть выполнены, например, в виде последовательно соединенных нуль-компаратора 20, вентиля 21 и инвертора22.
Инвертор-коммутатор 13 (фиг.4) состоит из трех одинаковыхканалов 23, которые могут быть выполнены, например, в виде операционного усилителя 24, принимающего
сигналы с выходов блока 15 сравнения скоростей и блока 16 сравнения углов, и управляющего работой электронного ключа 25.
Блок 14 формирования поправок (фиг.5) состоит из трех каналов 26, каждый из которых может быть реализован с помощью электронных ключей 27, 28 и 29, 30, управляемых сигналами соответственно с блоков сравнения углов 16 и сравнения скоростей 15, сумматоров 31 и 32, квадратора 33, вычитателей 34 и 35, операционного усилителя 36, обеспечивающего удвоение входного сигнала, делителя 37.
Блок 15 сравнения скоростей (фиг.б) состоит из трех каналов 38, каждый из которых
может быть выполнен в виде последовательно соединенных электронного ключа 39, инвертирующего операционного усилителя 40 и компаратора 41.
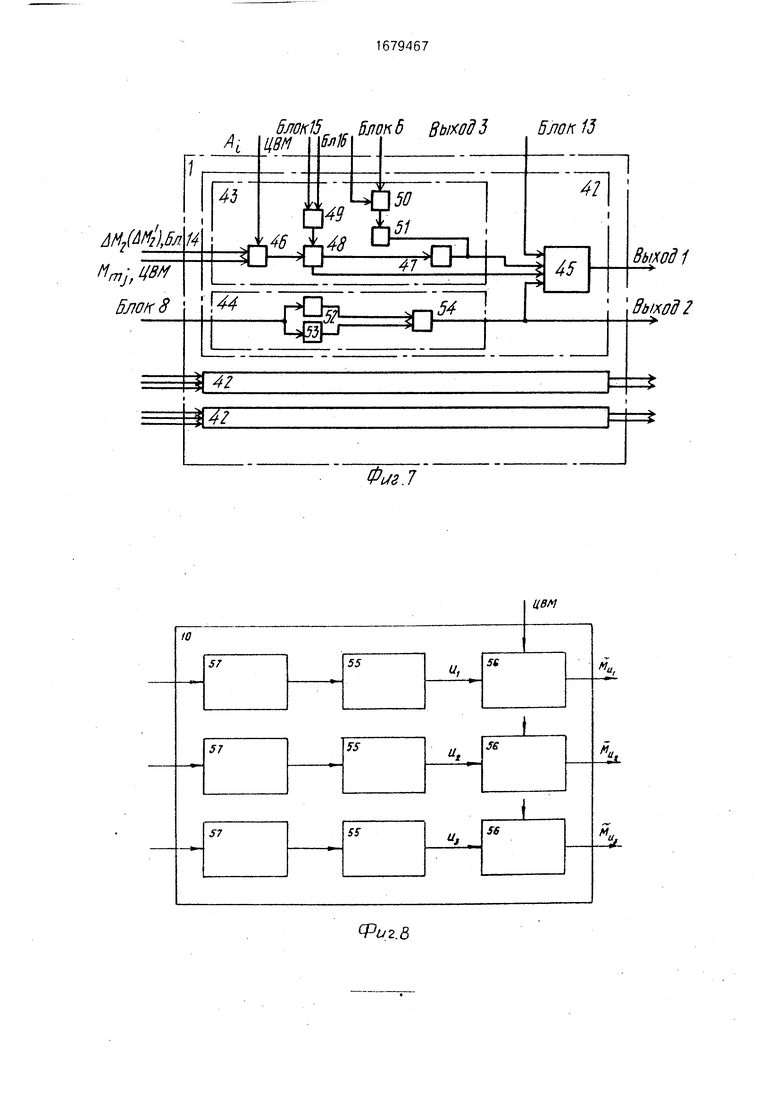
Блок 1 формирования управляющих
0 сигналов (фиг.7) состоит из трех каналов 42. каждый из которых включает формирователь постоянной составляющей сигнала управления Мк (программное устройство 43); формирователь составляющей сигнала уп5 равления МС| для ликвидации отклонения оси Эйлера от заданного в момент начала разворота положения (корректирующее устройство 44) и суммирующее устройство 45.
Программное устройство 43 включает операционные усилители 46 и 47, ключевую схему 48, схему ИЛИ 49, первый 50 и второй 51 сумматоры.
Корректирующее устройство 44 может быть выполнено в виде двух параллельно соединенных операционных усилителей 52 и 53.
Суммирующее устройство 45 выполнено в виде суммирующего операционного усилителя 54 на четыре входа,
Блок 10 оценки инерционного момента (фиг.8) содержит три дифференциатора 55 и три масштабных усилителя 56.
Движение объекта управления вокруг центра масс описывается динамическими уравнениями Эйлера:
h аи + (b-l2) uJ2 адз Mi,
l2ttЈ + (1Нз) М2,(1)
з (ОЗ + ( О Ы1 Мз,
где li - моменты инерции относительно главных осей (совпадающих с осями связанной с объектом системы координат);
щ -составляющие вектора угловой скорости по осям связанной системы координат;
MI - моменты сил, действующие на объект (соответственно осям связанной системы координат), I 1,2,3.
В блоке 11 идентификации возмущающего момента определяется величина составляющих момента возмущающих сил по связанным осям объекта в соответствии с выражениями
1$в1 Мк1 - Мс1,
МВ2 МИ2 - Мк2 - МС2,(2)
МвЗ МИ3 - МкЗ - МсЗ,
где 1йВ| - сигналы, соответствующие составляющим момента возмущающих сил по связанным осям объекта (I 1,2,3);
МИ| - сигналы, соответствующие составляющим инерционного момента сил, определяемые в блоке 10 оценки инерционного момента;
$к1 - сигналы, соответствующие составляющим программного управляющего момента сил, формируемые в блоке 1 формирования управляющих сигналов и обеспечивающие оптимальное расчетное движение объекта управ деяния 3;
MCf - сигналы управления, формируемые в блоках 7, 8, 9, 1 для ликвидации направления вектора угловой скорости объекта 3 управления от оси Эйлера.
Выражения (2), реализуемые в блоке 12 идентификации возмущающего момента, получаются из уравнений (1) с учетом идеальной компенсации в системе управления составляющих гироскопического момента
(вторые слагаемые в левых частях уравнений (1)) с помощью формирования в блоках 5 и 6 (фиг.1) управляющих сигналов MI. При этом уравнения (1) могут быть представлены в виде
|О)| МК| + МС| + МВ
(3)
где MI - Мк + Mci + Mai.
Левые части уравнений (3) содержат составляющие инерционного момента сил МК|, определяемые в блоке 10, что и позволяет записать выражения (2).
В блоке 12 анализа знака возмущающего момента (фиг.З) в зависимости от знака возмущающего момента вырабатываются сигналы, разрешающие выдачу информа5 ции с выхода блока 15 сравнения скоростей или выхода блока 16 сравнения углов.
В инверторе-коммутаторе 13 осуществляется инвертирование сигнала, пропорционального возмущающему моменту, и
0 выдача его в блок 1 формирования управляющих сигналов для компенсации момента возмущающих сил на этапе торможения во время углового разворота по команде с блока 15 сравнения скоростей или с блока 16
5 сравнения углов.
В блоке 14 формирования поправок вычисляются значения поправок к программному управляющему моменту Мк для участка торможения объекта в размерности углово0 го ускорения вокруг оси Эйлера в соответствии с выражением
(4)
5 в случае, когда на участке разгона знак программного управляющего момента совпадает со знаком момента возмущающих сил, и в соответствии с выражением
о Aft-&
-Мг
(5)
2 pk-4P(ti) в случае, когда знаки программного управляющего момента и момента возмущающих сил не совпадают.
В выражениях(4) и (5) применены следу- 5 ющие обозначения:
ДМ 2 , AM2 - поправки к модулю программного управляющего момента сил вокруг оси Эйлера в размерности углового ускорения для участка торможения управляемого объ- 0 екта;
Мт - максимальное значение программного управляющего момента сил в размерности углового ускорения, приведенное к оси Эйлера;
(t 1) - значение угловой скорости экстенсивного маневра в момент времени 11 , соответствующий переключению знака программного управляющего момента сил Мк
при выполнении условия y(tt)y5p, где Xt i ) - текущее значение угла разворота объекта в момент времени 11 ;
рр - расчетное значение угла разворота объекта в расчетный момент времени переключения знака управления tip;
ipp - расчетное значение угловой скорости разворота объекта при переключении знака управления (в момент времени tip);
(Ра- расчетное значение угла разворота в конце интервала времени углового разворота объекта;
y(ti)- текущее значение угла разворота объекта вокруг оси Эйлера в момент времени ti, соответствующий переключению зна- ka программного управляющего момента Мк при выполнении условия ф (ti ) ybp, где $ti) - текущее значение угловой скорости разворота объекта в момент времени ti.
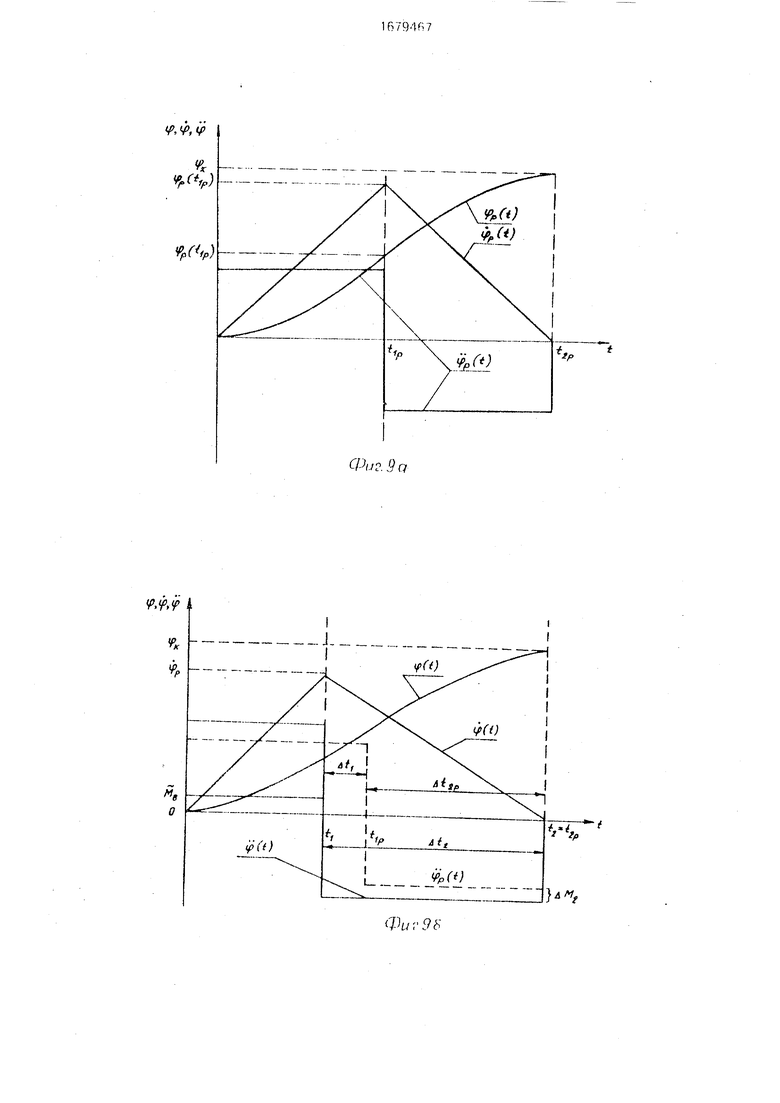
Приведем обоснование необходимости применения выражений (4) и (5) для определения поправок к программному управляющему моменту сил на участке торможения объекта в блоке 14 формирования поправок. С этой целью приведем сначала основные расчетные соотношения для оптимального программного движения объекта вокруг оси Эйлеоа (фиг.Эа), используя математическую модель движения объекта в виде
|СОр Мк,(6)
где (рр - расчетное угловое ускорение объекта относительно оси Эйлера;
i - момент инерции объекта относительно оси Эйлера;
Мк ± Mm - программный управляющий момент, формируемый ЦВМ.
Предполагая, что величина Мк является постоянной на соответствующих интервалах времени управления, что соответствует принципу построения оптимальных программ управления по критерию быстродействия, проинтегрируем уравнение (6) на первом интервале времени управления (на участке разгона объекта);
фр ifo ( tip ) /Мк dt Mmtlp.
Здесь p(tip)- расчетная угловая скорость объекта в расчетный момент времени переключения знака программного управляющего момента Мк, til. Мк/1 - приведенный программный управляющий момент (в размерности углового ускорения).
Интегрирование уравнения (7) приводит к выражению
2
(Ч Mm tin/n
tip) -5-,(8)
с учетом уравнения (7) выражение (8) может быть представлено в виде
РР
(9)
0
5
0
tip
(Ю)
откуда следует выражение для расчетного момента времени переключения знака программного управляющего момента tip
-2УР &
Предположим, что, кроме программного управляющего момента Мк, на участке разгона действует постоянный возмущающий момент Мв, совпадающий по направлению с моментом Мк. Будем считать, что на участке разгона отключен контур компенсации возмущающего момента Мв. В этом случае уравнение углового движения объекта вокруг оси Эйлера для участка разгона может быть представлено в виде
+ Мв.(11)
где Мв Мв/1 - приведенный возмущающий момент (фиг.9,б).
Проинтегрируем уравнение (11) для текущего момента времени t
P(t)/(Mm + Me)dt (МЪ +MB)t
(12)
Выражение (12) может быть записано с учетом (11) в виде
Ј((13)
После интегрирования уравнения (12) для текущего времени t получается выражение
(1)}(М„,+МВ). (14)
С учетом выражений (11) и (13) можно представить уравнение (14) в виде
(
(15)
40
45
50
55
или
((16)
Исследуем возможности повышения качества управления угловым разворотом объекта, изменяя момент времени переключения знака программного управляющего момента Мк по сравнению с расчетным tip.
Предположим, что переключение знака момента М« происходит в момент времени ti выполнения равенства
0(tl)&-(17)
В соответствии с выражениями (15) и (17) текущий угол разворота объекта в момент времени ti определяется в виде
p(ti)ti.(18)
Момент времени наступления равенства (17) в этом случае определяется в соответствии с выражением
«-ЦР1 (1«
Разность моментов времени tip и ti может быть получена из выражений (10) и (19):
Ati tip-ti (ti). (20)
Найдем такие значения программного управляющего момента М2 -Mm ± АМ2 и интервала времени At t2-ti на участке торможения объекта, которые при имеющихся на момент времени ti начальных условиях участка торможения $(ti)pM(ti) обеспечивают проведение объекта в заданное состояние (tz ) и (1г ) 0 в предположении о том, что на оставшемся интервале времени управления Atz полностью компенсируется возмущающий момент Мв с помощью контура управления на основе блоков 10, 11, 13 (фиг.1). С этой целью запишем уравнение движения объекта на участке торможения
р--Й1т±ДМ2(21)
и проинтегрируем его при начальных условиях участка торможения (на момент времени ti) до момента окончания углового разворота t2
ф (Ь) рр /(Mm ± А М2) dt
t,
(Mm±AM 2)At2.(22)
После интегрирования уравнения (22) получается выражение
P(l2)p(tl) -/(Mm ±АМ2)
ti
п
p (ti) + fo At2 -1 (Mm ± A MZ) At2 . (23)
С учетом требуемых условий конца интервала времени Afe уравнения (22) и (23) могут быть представлены в виде фр - (Mm ± AlVb) О,
1 ,-v2 (24)
(ti)+ pAt2-j(Mm±AM2)A{2 0v«
Решения системы уравнений (24) относительно неизвестных ( ± АМ2) и At2 имеют вид
(±АЦ)-21яЛ(«.)Гй- (25) .(26)
ГР
Для оценки эффективности системы управления угловым разворотом объекта, работающей на основе использования соотношений (17), (25), (26), выясним, как изменяются по сравнению с расчетным движением длительность времени углового разворота объекта и программный управляющий момент на участке торможения объекта. С этой целью запишем выражение дл расчетного интервала времени торможения объекта по аналогии с (26)
A tip t2p -tip -
2 h/ - №
fp
(27)
и вычислим разность между интервалами времени Дт.2 и At2p, используя соотноше- 5 ния(27)и(26)
At,-At2p :2i(ll)J(28)
г Сравнив выражение (28) и (20), нетрудно 10 установить их равенство. Это означает, что интервал времени торможения равен
+Ati -(29)
Следовательно, общее время Т углового разворота объекта не отличается от расчет- 15 ного, так как (фиг.96)
т -4i + Ah - ti + Af2p -t- Ati - tip + Af2P - t2P, (30) гдецр 11 + Ati.
Для оценки знака величины ( ± АМ2) в выражении (25) найдем выражения для $Лт, 0 используя выражения (8) и (10)
.2 IP
(3D
2fac-W Сравнивая знаменатели правых частей
5 выражений (25) и (31), нетрудно убедиться в выполнении неравенства
pk-fp(ti)(0fc-ft)-(32)
Это означает, что имеет место неравенство
0.2
(..(33)
Следовательно, добавка к программному управляющему моменту Мк на участке
5 торможения имеет отрицательный знак, так как
( ± ДМ2) 0.(34)
Таким образом, если на участке разгона объекта в его угловом движении возмущаю0 Щии момент Мв совпадает по знаку с программным управляющим моментом Мк. а переход к участку торможения осуществляется в момент времени ti при выполнении равенства (17), то для достижения заданных
5 конечных условий углового разворота требуется увеличить тормозящий момент на величину АМ2, вычисленную в соответствии с выражением (25), что не всегда возможно в силу реальных ограничений на величину уп0 равляющего момента. При этом общее время углового разворота остается равным расчетному для опорного движения.
Предположим, что переключение знака программного управляющего момента Мк
5 осуществляется в момент времени п наступления равенства
p(ti)pp,(35)
получим выражение при текущей угловой скорости $t 1) в момент 11 переключения знака программного управляющего момента. С учетом выражений (9), (15) и (35) можно
записать
1 / ч 1
TJ-V(tl)tl ,
(36)
откуда следует, что
Ј(ti)uAО)
tl
Из выражения (37) видно, что в момент времени t i текущее значение угловой скорости больше расчетного, т.е.
y(t i)№.(38)
Момент времени наступления равенства (35) в этом случае определяется в соответствии с выражением
tU-A-tip,-(39)
P(ti) получаем из (37). (
Разность Аи моментов времени tip и 11 можно найти, если воспользоваться соотно- шением (14), записав его в виде
2 у(11) {tfmJ sl,(40)
Выражение для At 1 имеет вид
At i tiP-vgp№
/Mm +ГИВ с учетом (35) получается выражение
Ati tip-vC22:
I ЮГ 4- I
(41)
(42)
Mm + Мв
Найдем значения программного управляющего момента Mz-M ± A M2 и интервала времени At 2 12 - t i на участке торможения объекта, обеспечивающие приведение объекта из состояния в момент времени 11 ,
характеризуемого значениями р (ti) pp и (ti) , в заданное состояние у(1а)си
р (ti) 0 в предположении об идеальной компенсации возмущающего момента на участке торможения. С этой целью запишем уравнения движения объекта на участке торможения
Ј -Mm±AM 2(43)
и проинтегрируем его при начальных условиях / (ti)j , #(ti) A°t момента времени окончания разворота 12 (фиг.6): &U) - tftf 1) - (1Йт ± А М 2) At a . (44) После интегрирования по времени уравнения (44) получается выражение
р(1г)Ю. +(м)Аа -5 (мт ±AM2)Afe(45
С учетом требуемых условий конца интервала времени At а уравнения (44) и (45) могут быть представлены в виде flt i)-(ltfm±AlU2)At2-0}
0
0
5
рр + lp (tl) А12 - (Mm ± А М2) Л12 J. (46)
Решения системы уравнений (46) относительно неизвестных ( ± Aftl 2) и At 2 имеют вид.,
)
.(48)
(ti) fr(ti)
Оценим эффективность системы управления угловым разворотом объекта на основе использования соотношений (35), (47) и (48). С этой целью найдем разность А между интервалами времени At2p и At 2 , применив выражения (27) и (48), и учитывая, что
A At2P -At2 2рр 11
5
0
0
5
5
0
1 . . (49) fp p(ti)J в силу выполнения неравенства (38)величина A fO, т.е.
At 2 At2P.( (50)
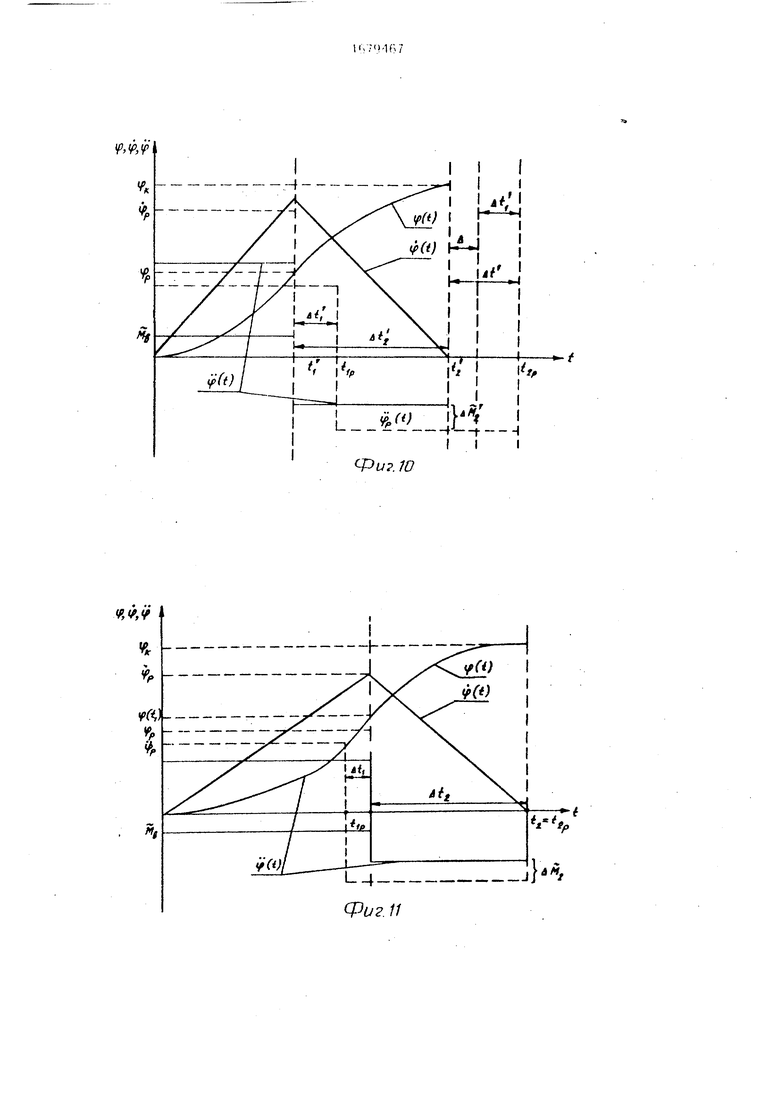
Таким образом, общее время Т углового разворота объекта в рассматриваемой ситуации, если учитывать соотношения (42) и (49), уменьшается по сравнению с расчетным t2p на величину At (фиг. 10), равную
,(51)
и определяется в соответствии с выражением
Т t2P- At t2P- Дм + A).J52)
Для оценки знака величины ( ± ДМ2 ) в выражении (47) представим ее, с учетом (31), в виде
(-ьА уп-ЈЧ) $ (п)- (53) V iiivy 2 ,pjj
Из выражения (53), с учетом неравенства (38), следует положительность величин ( ±ЛМ2), т.е.
( ± АМа) 0.(54)
Таким образом, если на участке разгона объекта действует возмущающий момент Мб, совпадающий по знаку с программным управляющим моментом Мк, целесообразно осуществлять переключение знака момента Мк по выполнению равенства (35) y(t i) . При этом достигается экономия расхода рабочего тела за счет отсутствия необходимости создавать составляющую компенсирующего момента для парирования Мв на участке разгона и за счет уменьшения модуля программного управляющего момента на величину AM 2 на участке торможения, вычисляемую в соответствии с выражением (47). Кроме того, обеспечивается повышение быстродействия системы управления за счет сокращения времени углового разворота объекта управления на величину At ,
Предположим, что на объект управления при угловом движении его на участке
разгона действует постоянный возмущающий момент Мв, направленный встречно моменту Мк. Будем предполагать, что на участке разгона отключен контур компенсации возмущающего момента. В этом случае уравнение углового движения объекта вокруг оси Эйлера может быть записано в виде ip Um - Мв.(55)
Проинтегрируем уравнение (55) для текущего момента вращения t
p(t) (Mm-MB)t.(56)
Интегрирование уравнения (56) приводит к выражению
V(t)-2()t2.(57)
Объединение уравнений (55)-(57) приводит к выражениям (15) и (16) вида, т.е.
Kt)(t)fИсследуем возможности повышения качества управления угловым разворотом объекта, изменяя момент времени переключения знака программного управляющего момента Мк по сравнению с расчетным tip.
Предположим, что переключение знака момента Мк происходит в момент времени ti, соответствующий выполнению равенства (17) р (ti) фр . В данном случае момент времени ti располагается на интервале времени Т1р-Г2р(фиг.11). Найдем выражение, определяющее задержку времени An наступления равенства (17) в рассматриваемой ситуации.
С учетом выражений (19) и (10) получает соотношение для Ati в виде
Д1,(58)
Найдем значения программного управляющего момента Ma -Mm ± AM2 и интервала времени At2 для участка торможения объекта обеспечивающие при имеющихся на момент времени ti начальных условиях ф (ti) (fa и р (ti) приведение объекта в заданное состояние 0(t2) -ф. и V(t2) 0 в предположении об идеальной компенсации возмущающего момента на участке торможения. С этой целью запишем уравнение движения объекта на участке торможения в виде
-Mm ± А .
Оно полностью совпадает с уравнением (21). Это означает, что имеют место выражения (25) и (26) для определения величин ЛКЙ2 и Atz, т.е.
() Ч1УД(.,)
ДЬ 1 |Й--Р()1.(59)
Рр
Для оценки эффективности системы управления угловым разворотом, как использующей соотношении (17) и (59). выясним, как изменяются по сравнению с расчетным
5 движением длительность времени разворота и величина программного управляющего момента на участке торможения. С этой целью найдем разность между расчетным интервалом времени At2p и At2, вычисляе10 мым в соответствии с выражениями (27) и (59), В результате получается выражение
At2P-At2 -2 M(60)
которое означает, в силу выполнения очевид- 5 ного неравенства р(Ь) , что длительность оставшегося интервала времени управления на участке торможения меньше расчетной. Сравнение правых частей выражений (60) и (58) позволяет установить их 0 равенство, т.е.
Дп At2p- At2.(61)
Следовательно, прогнозируемый интервал времени участка торможения At2 равен
5Ас2 Дг2р-Аг1,(62)
а общее время Т разворота объекта при переключении знака Мк по равенству (17) равно (фиг.11)
Т ti + At2 tip + A ti + At2P- An t2P. (63) т.е. совпадает с расчетным,
Для оценки знака величины ( ±АМ2) в первом из соотношений (59) представим его, с учетом (31), в виде
A -ii pra-jisЈftr(64)
В силу выполнения условия #(ti) pp можно записать неравенство ( ± ДМЮ 0.(65)
Таким образом, если на участке разгона объекта знак возмущающего момента Мв не совпадает со знаком момента Мк, то целесообразно переключение знака Мк осуществлять в момент времени ti выполнения равенства (17) (ti) -фр . При этом угловой разворот заканчивается за расчетное время t2p с экономией энергетических ресурсов, которая достигается за счет отсутствия необходимости создания составляющей сигнала управления на участке разгона, компенсирующей возмущающий момент MB, и за счет уменьшения модуля программного управляющего момента Мк на величину 5 АМа на участке торможения, вычисляемую в соответствии с первым из выражений (59).
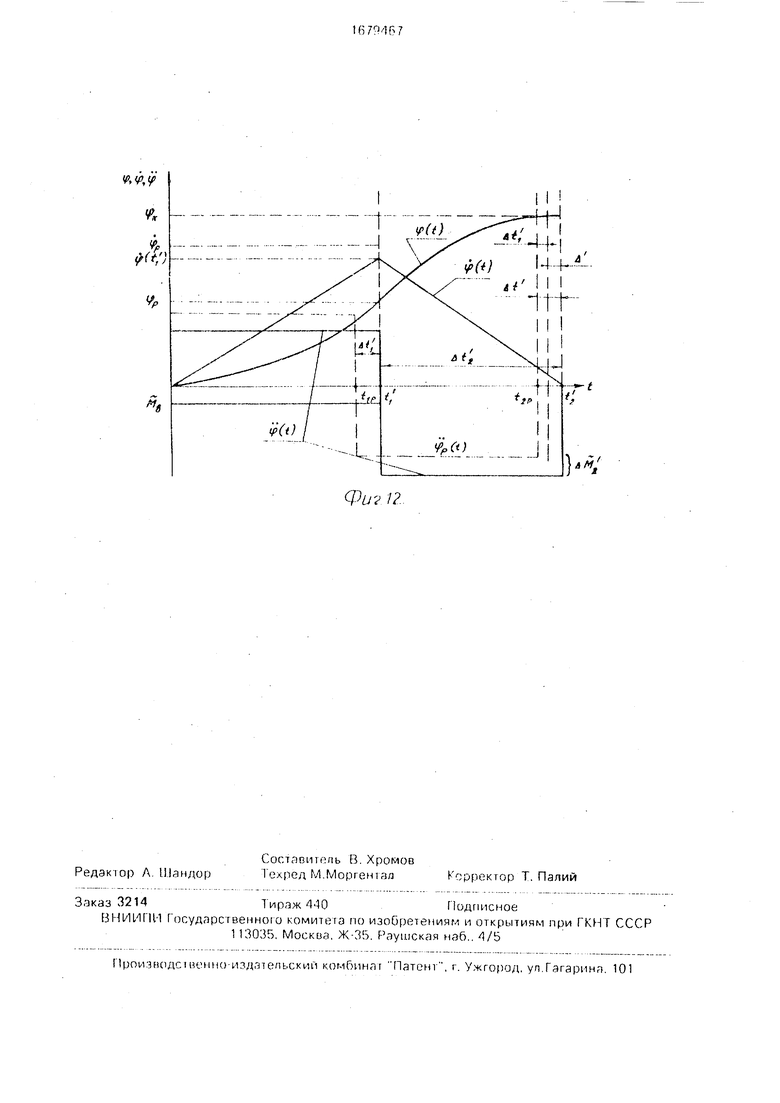
Предположим, что переключение знака программного управляющего момента Мк осуществляется в момент времени 11 наступления равенства (35) y(ti) pp- Вдан0
0
5
0
ной ситуации момент времени ti располагается на интервале времени tip-t2p (фиг. 12). По аналогии с ранее приведенными выражениями (36) и (37), можно записать
P(t i),
откуда следует неравенство (так как ti tip)
р (ti) pp.(66)
По аналогии с (14) запишем выражение для yXti)c учетом особенностей рассматриваемой ситуации
Kti)-()t 1.(67)
из которого находится момент времени 11
ti
V zptti)
Mm-4
(68)
С учетом (35) получается выражение для задержки времени переключения знака момента Мк At i 11 -tip
At VZlSrr-tn,.
Mm - MB
(69)
Найдем значения программного управляющего момента Mz -Mm ± AMj и интервала времени At 2 t2 -ti на участке торможения объекта, обеспечивающие приведение объекта из состояния в момент вре- мени ti , характеризуемого значениями
р (ti) fo и р (ti) фр, в заданное состояние р (ti) фь и ф (tz)0 в предположении об идеальной компенсаций Мв на участке торможения. С этой целью необходимо выполнить все преобразования с уравнением (43), приводящие к выражениям (47) и (48) для вычисления величин ( ±М2)и At 2.
Для оценки эффективности системы уп- равления найдем разность А ,между интерва- лами времени At2 и А:2р. применив выражения (27) и (48)
А А А2 Фр2Фр
Д Дй-Д«р т --
™
Неравенство (66) позволяет сделать вывод о том, что А 0, т.е. At2 Atap. (71) Таким образом, общее время углового разворота объекта Г в рассматриваемой ситуации, если учитывать соотношения (69) и (70), увеличивается по сравнению с расчет- ным на величину At (фиг.8), равную
At Ati+A ,(72)
и определяется в соответствии с выражением
0
5
0
5
0
5
0
5
0 5
Т tap + At t2P + At +Д . (73) Для оценки знака величины ( ± ДМ 2) проанализируем выражение (53) с учетом неравенства (66). В результате можно сделать вывод о выполнении неравенства ( ± Д&12) О,
Таким образом, если на участке разгона действует возмущающий момент Мв, не совпадающий по знаку с моментом Мк, и переключение знака Мк осуществляется по выполнению
равенства (35) р (ti) рр , то увеличивается время разворота объекта на величину At и модуль программного управляющего момента на участке торможения на величину АМ2 , что приводит к ухудшению качества управления.
Проведенный анализ описанных ситуаций доказывает необходимость применения выражений (4) и (5) для технической реализации блока 14 формирования поправки.
В блоке 14 формирования поправок электронные ключи 27 и 28 пропускают сигналы y3(ti)npp , поступающие из ЦВМ соответственно на сумматоры 31 и 32 при поступлении сигнала с блока 16 сравнения углов. Электронные ключи 29 и 30 пропускают сигналы фр(из ЦВМ) р()} соответственно на сумматоры 31 и 32. Сигналы с сумматора 31 через квадратор 33 и сумматора 32 через операционный усилитель 36 поступают на входы делителя 37, величина выходного сигнала которого уменьшается на величину, пропорциональную Мк, поступающую через вход 3 с блока 1 формирования управляющих сигналов в вычитателе 35. Выход вычитателя соединен с входом 4 блока 1 формирования управляющих сигналов. Выражение рк - y(ti) вычисляется в вычитающем операционном усилителе 34, на входы которого поступают сигналы р и
yj(t i i3UBM.
Блок 15 сравнения скоростей осуществляет сравнение текущей скорости разворотов объектов р (t) с расчетной фр и выдачу сигнала в момент времени ti выполнения равенства y(ti) fo в блок 1 формирования управляющих сигналов, инвертор-коммутатор 13 и блок 14 формирования поправок.
Электронный ключ 39 коммутирует сигнал с второго выхода блока 5 формирования квадрата нормы вектора угловой скорости с входом инвертирующего усилителя 40 по команде с выхода 2 блока 12 анализа знака возмущающего момента. Компаратор 41 сравнивает сигналы, поступающие на его входы с инвертируемого усилителя 40 и из ЦВМ и выдает сигнал о равенстве текущей угловой скорости расчетному значению на
пятый вход блока 1, на второй вход блока 13 и на первый вход блока 14.
Блок 16 сравнения углов осуществляет сравнение текущего значения угла поворота объекта вокруг оси Эйлера р (t) с расчетным рр и выдачу сигнала в момент времени
ti выполнения равенства (р (ti) на штатный вход блока 1 формирования управляющих сигналов, на третий вход и инвертора-коммутатора 13 и на второй вход блока 14 формирования поправок. Техническая реализация блока 16 полностью идентична рассмотренному блоку 15.
Блок 17 интегрирования нормы вектора угловой скорости осуществляет инвертирование модуля вектора текущей углбвой скорости разворота объекта вокруг оси Эйлера и формирует сигнал о текущем значении угла p(i) в блок 16 сравнения углов и ЦВМ. Блок 17 может быть выполнен на основе интегрирующего операционного усилителя.
Постоянные составляющие программного управляющего момента сил М« на участке разгона объекта (0 t ti) формируются в блоке 1 формирования управляющих сигналов в соответствии с выражением
Мк Мт
MKJ-H MmAj-t-1 Г(74)
MKj+2 MmAJ+aJ
где Mm - модуль вектора программного управляющего момента сил Мк,
ti (или 11) - момента времени переключения управления
. ,.,(75)
где, в свою очередь, v - значения направляющих коминусов, определяющих заданную ориентацию оси Эйлера и вычисленные в ЦВМ;
h - момент инерции по связанным осям объекта.
Постоянные составляющие программного управляющего момента сил М« на участке торможения объекта (ti t Т) формируются в блок 1 в соответствии с выражениями
Мк Mm- ДМ2
- (Mm- ДМ2) Aj+1 у(76)
- (Mm- AMa) Aj+2 J где ДМ2 (или ДМ 2 ) - поправка к модулю программного управляющего момента сил, формируемая в блоке 14 для участка торможения объекта в соответствии с выражением (4) или (5).
Программное устройство 43 может включать операционные усилители 46 и 47, ключевую схему 48, управляемую сигналами с блоков 15 и 16. Эти сигналы через схему ИЛИ 49 воздействуют на управляющий вход ключа 48. На вход усилителя 46 поступают сигналы, пропорциональные величине Мт
и, кроме того, на участке торможения - сигналы, пропорциональные величине ЛМ2 Переключение резисторов в цепи обратной связи усилителя 46 обеспечивает умноже- 5 ние значений fum (или fvfm- AM 2) на коэффициент AI, вычисляемый в ЦВМ к началу разворота. Выходной сигнал усилителя 46. пропорциональный составляющей программного управляющего момента Мк, по0 ступает на сумматор 50, где складывается с сигналом, пропорциональным переменной составляющей сигнала управления, поступающим с выхода блока 6 формирования переменной составляющей сигнала управ5 ления. Сумматор 51 обеспечивает поступление сигнала с выхода операционного усилителя 46 на сумматор 50. Независимо от того, в каком направлении распространяется сигнал после ключевой схемы 48 (непос0 редственно на сумматор 45 при 0 t ц либо через инвертирующий операционный усилитель 47 при ti t тг).
Корректирующее устройство 44 может быть выполнено в виде двух параллельно
5 соединенных операционных усилителей 52 и 53 с общим входом, соединенным с выходом усилителя 8, и суммирующего усилителя 54, входы которого соединены с выходами усилителей 52 и 53, а выход - с одним из
0 видов сумматора 45 с первым входом блока 11 идентификации возмущающего момента. Параллельно соединенные усилители 52 и 53 выполнены по схеме дифференцирующего и безинерционного динамических звень5 ев соответственно и, таким образом, обеспечивают реализацию закона управления по координате и производной в контуре стабилизации положения оси Эйлера.
Суммирующее устройство 45 может
0 быть выполнено в виде суммирующего операционного усилителя на четыре входа, на два из которых поступают сигналы с программного устройства 32, на третий - выходной сигнал корректирующего устройства 40,
5 на четвертый - сигнал с блока 13. Выход суммирующего устройства 45 соединен с блоком 2 исполнительных органов,
Блок 2 исполнительных органов может быть выполнен в виде управляющих реак0 тивных двигателей ориентации или инерционных исполнительных органов (силовых гироскопов), создающих реактивные моменты.
Блок 4 датчиков угловой скорости может
5 быть выполнен в виде трех гироскопических датчиков угловых скоростей, жестко установленных по отношению к корпусу объекта и формирующих на в,ыходе электрические сигналы переменного синусоидального токй, -м 5ающак которых: пропорциональна п,.ям yi левой скорости на оси связанной системы координат.
Переменные составляющие сигнала управлений, компенсирующие гироскопический момйнт, формируются в блоке 6 формирования переменной составляющей сигнала управления в соответствии с выражениями
Mrj - О,
, ((77)
Mrj-и Bj4i p где j - номер оси, по которой прикладывается максимальная составляющая управляющего момента;
Bj-постоянные коэффициенты, зависящие только от начальных условий и от тензора инерции объекта и вычисления в ЦВМ перед началом разворота по формулам
Oj - bi-Aibj; bi (н2--1м) Vi + t Vi -f +., где Ai определяется а соответствии с выражениями (75).
Каждый из трех каналов блока 6 может быть выполнен в виде, например, масштабных операционных усилителей, переменность коэффициентов усиления которых в связи с изменением начальных условий разворота м тензора инерции объекта может обеспечиваться переключением резисторов Е целях обрат ных связей операционных уси- лителей ключами, управляющими с помощью ЦВМ.
В блоке 10 оценки инерционного момента осуществляется дифференцирование сигналов, поступающих с выхода блока А датчиков угловой скорости и определение составляющих вектора момгчга инерционных сил на оси связанной cm-темы координат в соответствии с выражениями
Ми1 Ни1,
Ми 12И2,(78)
Миз зиз,
где ич-из - сигналы на выходе дифференциаторов, входящих в состав блока 10 оценки инерционного момента;
FI, (2, з масштабные коэффициенты, пропорциональные составляющим тензора инерции по осям объекта;
Ми1, Ми2. Миз сигналы на выходе блока, пропорциональные проекциям инерционного момента сил на связанные оси.
Блок 10 оценки инерционного момента (фиг.8) содержит три дифференциатора 55 для преобразования сигналов с выхода блока 4 датчиков угловых скоростей и три масштабных усилителя 56, обеспечивающих умножение выходных сигналов дифференциаторов на масштабные коэффициенты И, 12/Гз.
Кроме того, если блоком 4 формируются электрические сигналь переменного синусоидального тока, в состав блока 10 должны входить три фазочувствительных выпрямителя 57,
чыходы которых соединяются с выходами дифференциаторов 55, Дифференциаторы 55 могут быть, например, выполнены на основе операционных усилителей, в том числе и в интегральном исполнении. Масштабные ус0 тройства могут быть также выполнены нз основе операционных усилителей, входы которых соединены с выходами дифференциаторов. Выбор конкретного набора значений масштабных коэффициентов, соответствую5 щих значениям составляющих тензора инерции на момент начала очередного разворота объекта, осуществляется, например, переключением резисторов в цепях обратных связей усилителей постоянного тока, на
0 которых настроены масштабные устройства. Управление переключением осуществляется с помощью ЦВМ.
Система работает следующим образом. В начале углового разворота объекта
5 (t 0) в блоке 1 формирования управляющих сигналов в соответствии с выражениями (74) вырабатываются сигналы управления, поступающие на блок 2 исполнительных органов 2, который создает соответствующие
0 управляющие моменты, воздействующие на корпус объекта и приводящие его во вращение. С возник ювением угловой скорости р ш появляются сигналы, снимаемые с блока 4 датчиков угловой скорости, В блоке 5 формирования
5 квадрата нормы вектора угловой скорости вырабатывается сигнал в соответствии с формулой
. ,2,3.(79)
0
5
0
5
I 1
В блоке 6 формирования переменной составляющей сигнала управления сигнал с выхода блока 5 формирования квадрата нормы вектора угловой скорости умножается на предварительно вычисленные в ЦВМ коэффициенты bi в соответствии с выражениями (77). Сформированные таким образом управляющие сигналы, предназначенные для компенсации гироскопического момента, поступают нз первый вход блока 1 формирования управляющих сигналов.
Одновременно сигналы ад с выхода блока 4 датчиков угловой скорости поступают на вход блока 7 формирования сигналов отклонения оси вращения от заданною направления и на вход блока 10 оценки инерционного момента.
Блок 7 реализует функцию
fi aj/VJ7oHP. 1-1-2.3.(80)
для чего в него поступает также сигнал, пропорциональный I lull I2 , с выхода блока 5. С сигналом, идущим от блока 7, в сумматоре 9 складывается соответствующий сигнал v (vi vi ) , взятый с обратным знаком, где vi(l - 1, 2, 3) - направляющие косинусы оси Эйлера, заданные в виде начальных условий разворота или однократно вычисленные в ЦВМ по начальным условиям, заданным в виде углов Эйлера. Сигнал на выходе сумматора 9 отличен от нуля лишь в том случае, когда направляющие косинуса вектора угловой скорости отличаются от опорных значений. Это может происходить в результате действия на объект внешних возмущающих воздействий или изменения составляющих тензора инерции объекта в процессе разворота или при нулевом начальном значении угловой скорости. Во всех этих случаях сигнал с выхода суммато- ра 9, усиленный в усилителе 8, поступает для выработки управляющего сигнала Mci (в корректирующем устройстве блока 1), обеспечивающего стабилизацию направления вектора угловой скорости объекта вдоль за- данной оси Эйлера.
В блоке 10 оценки инерционного момента осуществляется дифференцирование сигналов ЙА и умножение сигналов, пропор
циональных значениям углового ускорения
ОН, на постоянные коэффициенты Т|, формируемые в ЦВМ, в соответствии с выражениями (78).
Сигналы МИ|, сформированные в блоке 10, поступают на третий вход блока 11 иден- тификации возмущающего момента. На первый вход блока 11с первого выхода блока 1 поступают сигналы Mci, а на второй вход блока 11 поступают сигналы МК| с третьего выхода блока 1. В результате, и соответствии с выражением (2) в блоке 11 определяются значения сигналов (Лд, пропорциональные составляющим возмущающего момента сил Мв.
Сигналы МВ| с выхода блока 11 поступа- ют в блок 12 анализа знака возмущающего момента, где происходит определение знака величины Мв и формирование сигналов, разрешающих выдачу выходной информации блоков 15 и 16. Если Мв 0, то сигнал с первого выхода блока 12 поступает в блок 16 сравнения углов и готовит цепь выдачи информации блоком 16 в момент наступления равенства (35) y(ti) fo . Если , то сигнал с второго выхода блока 12 поступает в блок 15 сравнения скоростей и готовит цепь выдачи информации блоком 15 в момент наступления равенства (17) tP(ti)fl .
5 0 5 0 5
0
5 0
5 0
Таким образом, сигналы на том или ином выходе блока 12 появляются в зависимости от знака возмущающего момента М8.
В блоках 15 и 16 осуществляется непрерывное сравнение текущих значений угловой скорости и угла разворота объекта вокруг оси Эйлера с расчетными, поступающими из ЦВМ. В зависимости от знака возмущающего момента Мв, анализируемого в блоке 12, один из блоков 15, 16 вырабатывает сигнал о равенстве сравниваемых им параметров. По этому сигналу в блоке 1 инвертируется знак программного управляющего момента М (через пятый и шестой входы блока 1) и начинается этап торможения объекта управления. Кроме того, в инверторе- коммутаторе 13 начинает формироваться составляющая сигнала управления для компенсации возмущающего момента на участке торможения, которая через третий вход поступает в блок 1, а в блоке 14 формируется по одному из выражений (4), (5), поправка к программному управляющему моменту на участке торможения объекта, которая через четвертый вход поступает в блок 1 и уменьшает модуль программного управляющего момента.
Таким образом, на участке торможения объекта происходит инвертирование знака программного управляющего момента Мк, формирование составляющей сигнала управления для компенсации возмущающего момента и формирование поправок к программному управляющему моменту, обеспечивающей уменьшение его модуля.
При достижении объектом управления заданного конечного угла разворота ЦВМ вырабатывает команду на окончание разворота, которая поступает в блок 1 и обнуляет сигнал управления на входе блока 2 исполнительных органов.
По сравнению с прототипом предложенная система имеет следующие преимущества.
Без уменьшения точности приведения объекта управления а заданное конечное состояние при угловых разворотах и увеличения времени разворота достигается снижение затрат энергетических ресурсов благодаря изменению момента времени переключения знака программного управляющего момента по сравнению с расчетным с учетом результатов идентификации возмущающего момента сил в реальном масштабе времени на участке разгона объекта. Снижение затрат энергетических ресурсов (экономия рабочего тела) в предлагаемой системе управления проявляется в отсутствии необходимости создавать составляющую момента управляющих сил на участке
разгона объекта для компенсации внешних и паря-метрических возмущений, а также в уменьшении модуля программного управ ляющего момента сип на участке торможения объекта на величину, вычисляемую в блоке формирования поправок предлагаемой системы управления.
Формула изобретения Система аотоматического управления пространственным разворотом объекта, со- держащая блок формирования управляющих сигналов, первый выход которого через блок исполнительных органов подключен к входу объекта управления, выход объекта управления соединен с входом блока датчиков угловой скорости, выход которого подключен к первому входу блоха формирования сигнала отклонения оси вращения от заданного направления, к входу блока формирования квадрата нормь вектора угловой скорости и к входу блока оценки инерционного момента, первый выход блока формирования квадрата нормы вектора угловой скорости подключен к второму входу блока формирования сигнала отклонения оси врзшения от заданного направления и через блок формирования неременной составляющей сигнала управления к первому входу блока формирования управляющих, сигналов, выход блока формирования си нала отклонения оси вращения от заданного направления через последовательно соединенные сумматор и усилитель подключен к второму входу блока формиро вания управляющих сигналов, отличающаяся тем, что, с целью уменьшения затрат на организацию пространственного разворота объекта при действии возмущений, в систему дополнительно введены блок анализа знака возмущающего момента,
блок идентификации возмущающего момента, инвертор-коммутатор, блок формирования поправок, блок сравнения скоростей, блок сравнения углов и блок интегрирования нормы вектора угловой скорости, причем первый вход блока идентификации возмущающего момента соединен с вторым выходом блока формирования управляющих сигналов, второй вход соединен с третьим выходом блока формирования управляющих сигналов, третий вход - с выходом блока оценки инерционного момента, а выход - с входом блока анализа знака возмущающего момента и первым входом инвертора-коммутатора, первый выход блока анализа знака возмущающего момента соединен с первым входом блока сравнения углов, второй выход - с первым входом блока сравнения скоростей, второй вход инвертора-коммутатора связан с первым входом блока формирования поправок, выходом блока сравнения скоростей и третьим входом блока формирования управляющих сигналов, третий вход инвертора- коммутатора подключен к второму входу блока формирования поправок, к выходу блока сравнения углов и четвертому входу блока формирования управляющих сигналов, выход инвертора-коммутатора соединен с пятым входом блока формирования управляющих сигналов, шестой вход и четвертый выход блока формирования управляющих сигналов подключены соответственно к третьему входу и выходу блока формирования поправок, второй выход блока формирования квадрата нормы вектора угловой скорости связан с вторым входом блокз сравнения скоростей и через блок интегрирования нормы вектора угловой скорости - с вторым входом блока сравнения углов.

Изобретение относится к управлению движущимися объектами (например летательными аппаратами) около центра масс и позволяет уменьшить расход энергетических ресурсов при выполнении программных угловых маневров за счет организации процесса идентификации внешних возмущающих моментов при движении объекта и использования полученной информации для изменения момента времени переключения программного управляющего момента с участка разгона на участок торможения. а также для уменьшения модуля программного управляющего момента по сравнению с расчетным на участке торможения. В системе автоматического управления пространственным разворотом объекта 3 имеются блок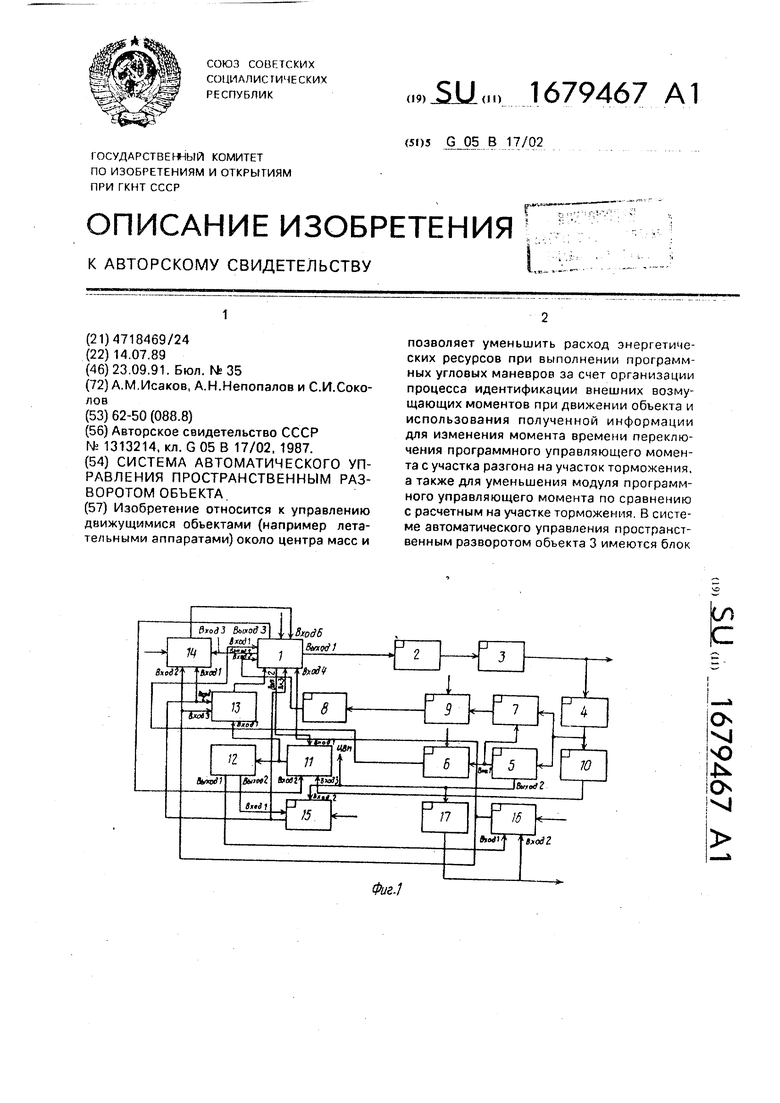
вхп г
В off J
18
л /г
&ХГЭд /
L Mcj)
ч,ч,ч
V
ъ
м.
Фи.9п
ФигУЯ
,4
L
Mt
+-f
Ъ()
-t--H
Фи. Ю
V, V, f
Фи i.
| Авторское свидетельство СССР № 1313214,кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
