Изобретение относится к области космической техники и может использоваться для эффективного управления угловым положением космических аппаратов, орбитальных станций и специализированных модулей.
Известно множество способов управления разворотом космического аппарата (КА). Простейшим и наиболее распространенным является изменение углового положения КА путем выполнения последовательных поворотов на определенные углы вокруг осей, жестко связанных с аппаратом [1] Возможен, например, такой порядок разворотов поворот вокруг поперечной оси КА до совмещения продольной его оси X своего требуемого конечного положения Xк, а затем вращение КА вокруг продольной оси X до совмещения связанных с КА осей YZ с требуемым положением в пространстве YкZк. Величины углов поворота вокруг поперечной оси β и продольной оси a определяются через компоненты кватерниона:
где  кватернионы начального и конечного угловых положений КА.
кватернионы начального и конечного угловых положений КА.
Угловые скорости разворота могут быть выбраны из условия минимизации величины кинетического момента в процессе совершения поворотного маневра.
Системы управления, реализующие развороты вокруг связанных осей КА, широко известны и хорошо изучены. При многих достоинствах подобных систем, включая их простоту и надежность, они имеют один существенный недостаток - большую продолжительность осуществления маневра при равных затратах кинетического момента.
Ближайшим по технической сущности аналогом является способ управления разворотом КА [2] включающий определение угловой скорости разворота, в заданный момент времени разгон космического аппарата и по окончании участка движения с постоянной по величине угловой скоростью торможение космического аппарата. В этом способе управления предполагается, что космический аппарат вращается вокруг оси Эйлера, причем направление вектора угловой скорости вращения КА постоянно. Ориентация оси Эйлера относительно связанных с КА осей определяется кватернионом разворота  . Определяющими характеристиками процесса разворота являются расчетная величина скорости разворота ω и время разгона КА t.
. Определяющими характеристиками процесса разворота являются расчетная величина скорости разворота ω и время разгона КА t.
Управляющие моменты формируются на участках разгона и торможения, исходя из выражения:
где  расчетное угловое ускорение;
расчетное угловое ускорение;
J тензор инерции КА; текущая угловая скорость КА;
текущая угловая скорость КА; ортвектора ориентации оси Эйлера.
ортвектора ориентации оси Эйлера.
Знак "+" соответствует участку разгона, а знак "-" участку торможения. На участке движения КА с постоянной угловой скоростью моменты управления также постоянны и компенсируют гироскопические моменты, возникающие при вращении твердого тела вокруг оси, не совпадающей с главной центральной осью инерции.
Приведение КА из начального углового положения  в требуемое конечное положение
в требуемое конечное положение  производится следующим образом. По имеющимся параметрам разворота (
производится следующим образом. По имеющимся параметрам разворота ( ) определяют расчетную угловую скорость
) определяют расчетную угловую скорость  . По расчетной величине угловой скорости и эффективности исполнительных органов определяют время разгона t.
. По расчетной величине угловой скорости и эффективности исполнительных органов определяют время разгона t.
С момента поступления команды на разворот к КА прилагают управляющий момент (1) до тех пор, пока фактическая угловая скорость  не станет равной расчетному значению
не станет равной расчетному значению  . В момент равенства этих скоростей начинается участок движения КА с постоянной угловой скоростью, а управляющие моменты формируются следящей системой таким образом, чтобы это условие как можно точнее выполнялось. Через заданное время разворота КА (T) производят торможение КА.
. В момент равенства этих скоростей начинается участок движения КА с постоянной угловой скоростью, а управляющие моменты формируются следящей системой таким образом, чтобы это условие как можно точнее выполнялось. Через заданное время разворота КА (T) производят торможение КА.
Недостатком способа-прототипа является сравнительно большая величина кинетического момента КА во время разворота.
Техническим результатом данного изобретения является существенное снижение величины кинетического момента КА в процессе разворота.
Указанный технический результат достигается тем, что в предлагаемом способе управления разворотом космического аппарата, включающем определение угловой скорости разворота, в заданный момент времени разгон космического аппарата, вращение аппарата с постоянной по величине угловой скоростью, торможение космического аппарата, в отличие от прототипа определяют угол отклонения оси прецессии от продольной оси аппарата n, определяют угол поворота вокруг оси прецессии b и угол вращения вокруг продольной оси a, формируют и прилагают к космическому аппарату управляющий момент, обеспечивающий одновременное вращение аппарата вокруг оси прецессии и вокруг продольной оси с постоянными угловыми скоростями  .
.
Указанный технический результат достигается также тем, что момент начала участка торможения определяется условием:
где ωx - угловая скорость относительно продольной оси КА;
ωy,ωz - угловые скорости относительно поперечных осей КА;
t время с начала разворота;
τ - расчетное время торможения КА;
ψ - обобщенный угол разворота, равный α+β(|cosν|+|sinν|).
Указанный технический результат достигается еще и тем, что определяют угол разворота от начального до требуемого конечного углового положения Φ, непрерывно измеряют угол разворота от текущего до требуемого конечного углового положения vост, а торможение космического аппарата начинают с момента выполнения условия:
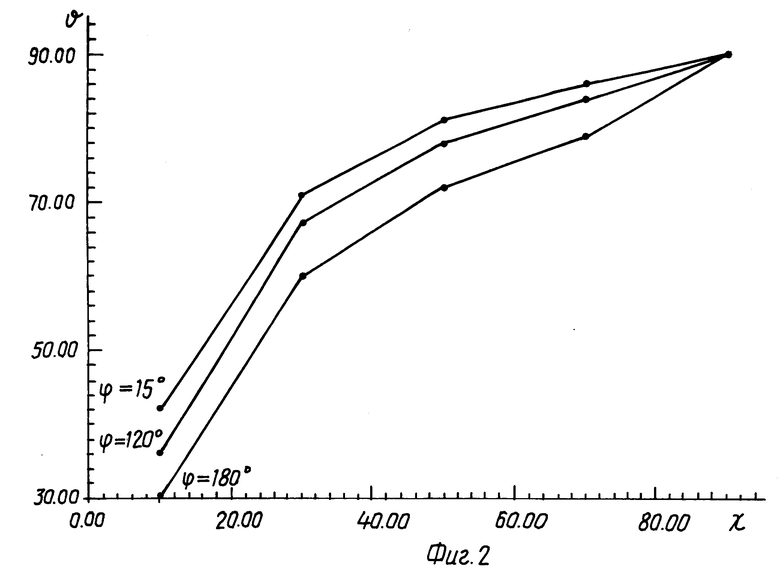
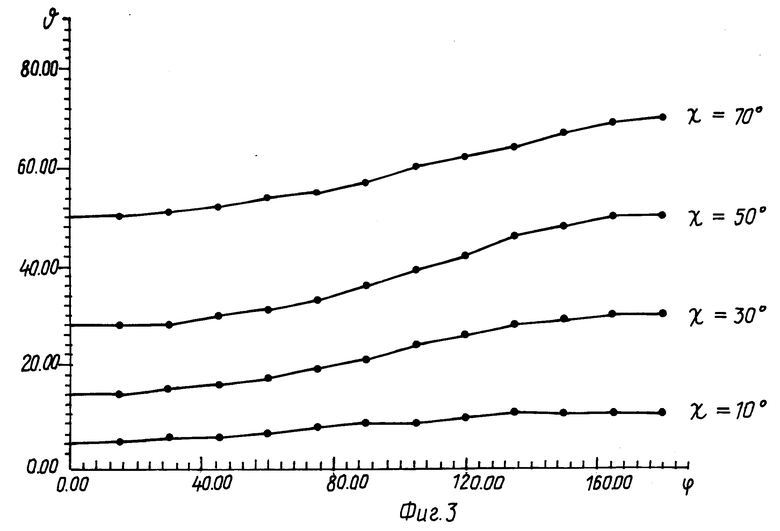
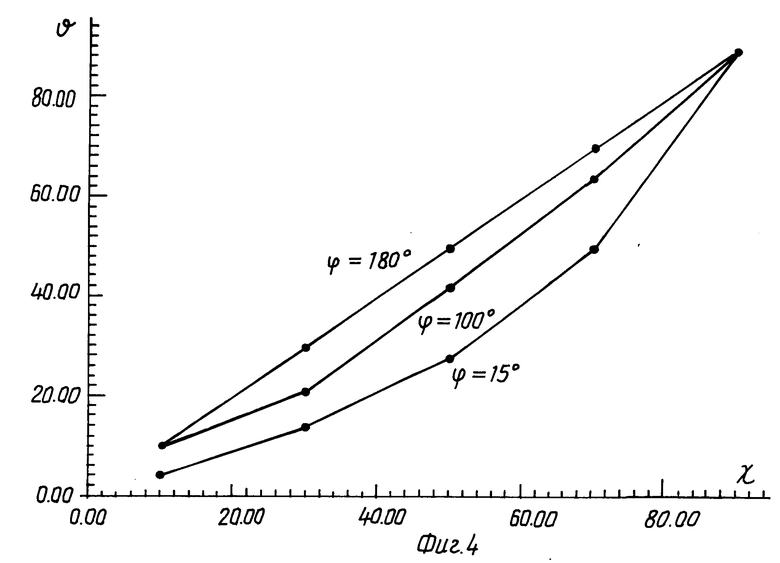
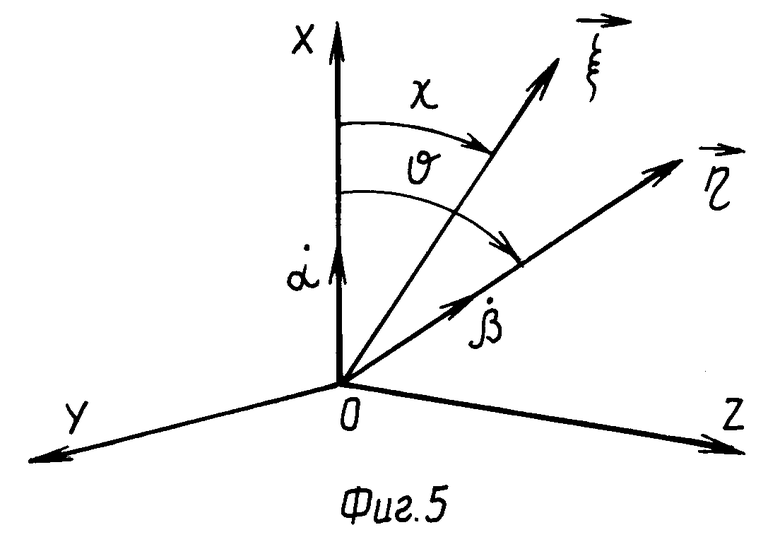
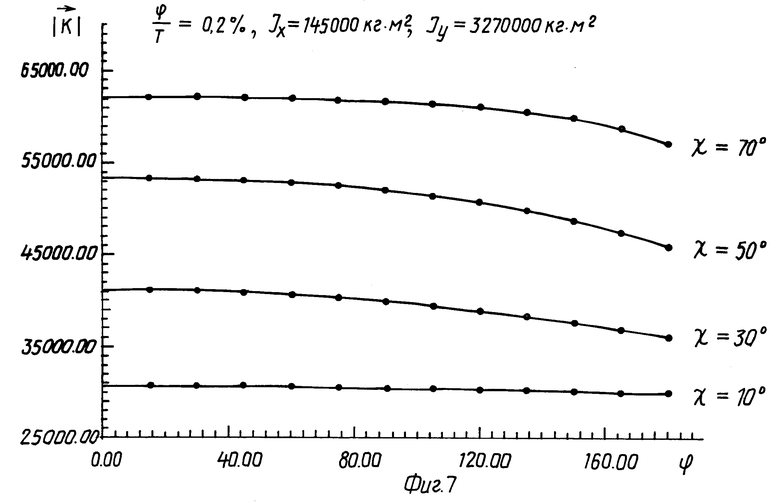
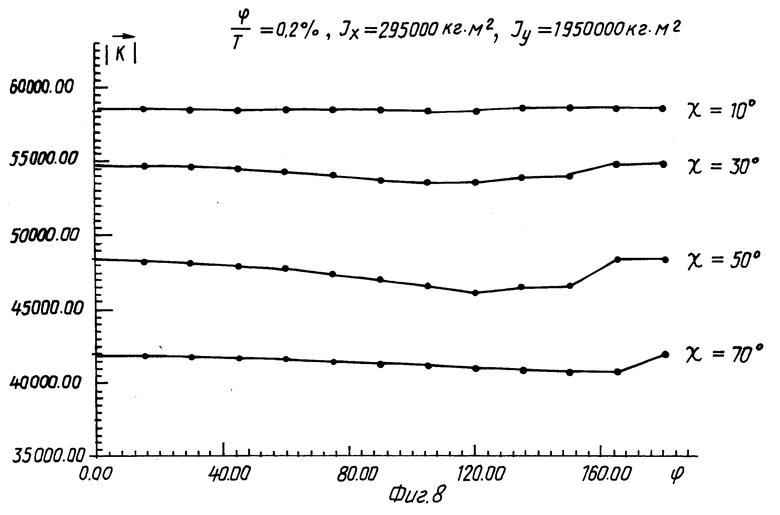
На фиг. 1 изображена зависимость ν(Φ) при различных κ для соотношения моментов инерции КА: Jy > Jx; на фиг. 2 зависимость n(χ) при различных Φ для того же случая Jy > Jx; на фиг. 3 - зависимость n(Φ) при различных κ для случая: Jy <Jx; на фиг. 4 зависимость n(χ) при различных Φ для случая Jy <Jx; на фиг. 5 поясняется физический смысл углов k и n на фиг. 6 приведена функциональная схема системы, реализующей способ; на фиг. 7 величина экономии кинетического момента для случая Jy > Jx; на фиг. 8 - величина экономии кинетического момента для случая Jy <Jx.
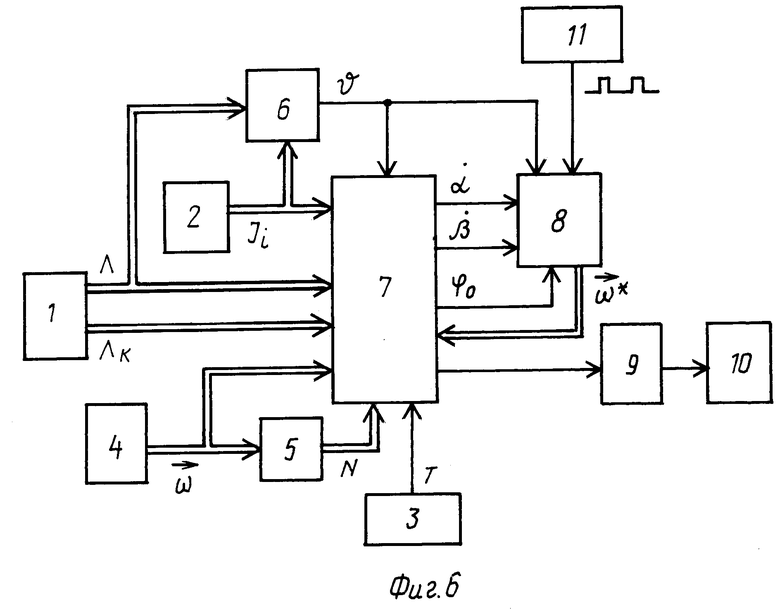
Пример реализации предложенного способа представлен на фиг. 6, где обозначено: 1 устройство ввода и хранения параметров разворота (УФХПР), 2 -блок задатчиков моментов инерции КА (БЗМИ), 3 устройство ввода и хранения времени разворота (УВХВР), 4 блок датчиков угловых скоростей (БДУС), 5 - бесплатформенная инерциальная навигационная система (БИНС), 6 блок определения угла отклонения оси прецесии от продольной оси КА (БОУО), 7 - вычислительное устройство (ВУ), 8 блок формирования программного вектора угловой скорости (БФПУС), 9 согласующе-преобразующее устройство (СПУ), 10 - система исполнительных органов (СИО), 11 -программно-временное устройство (ПВУ). Первый выход УВХПР 1 связан с первым входом ВУ 7, второй выход УВХПР 1 связан с первым входом БОУО 6 и со вторым входом ВУ 7. Выход БЗМИ 2 связан со вторым входом БОУО 6 и с третьим входом ВУ 7. Выход УВХВР 3 связан с четвертым входом ВУ 7, выход БДУС 4 связан с входом БИНС 5 и с пятым входом ВУ 7. Выход БИНС 5 связан с шестым входом ВУ 7, выход БОУО 6 связан с седьмым входом ВУ 7 и первым входом БФПУС 8. Первый выход ВУ 7 связан со вторым входом БФПУС 8, второй выход ВУ 7 связан с третьим входом БФПУС 8, третий выход ВУ 7 связан с четвертым входом БФПУС 8, четвертый выход ВУ 7 связан с входом СПУ 9. Выход БФПУС 8 связан с восьмым входом ВУ 7, выход СПУ 9 связан с входом СИО 10, выход ПВУ 11 связан с пятым входом БФПУС 8.
Блок определения угла отклонения оси прецессии от продольной оси КА состоит из набора матриц аппроксимирующих коэффициентов функции n(λo,λ1),, соответствующих нескольким характерным сочетаниям моментов инерции (Jx, Jy), и собственно вычислителя нелинейной функции аргументов λo,λ1.
Вычислительное устройство производит все математические операции, необходимые для реализации способа: вычисление по углу ν требуемых угловых скоростей  и угла vo, расчет времени разгона τ и пороговых значений jрасч,Φ,Φост, а также содержит в себе алгоритм формирования требуемых величин проекций управляющего момента на связанные с КА оси, обеспечивающий выбранную кинематику движения КА.
и угла vo, расчет времени разгона τ и пороговых значений jрасч,Φ,Φост, а также содержит в себе алгоритм формирования требуемых величин проекций управляющего момента на связанные с КА оси, обеспечивающий выбранную кинематику движения КА.
Блок формирования программного вектора угловой скорости вырабатывает расчетное значение вектора угловой скорости как функцию времени, соответствующую программной траектории вращения КА.
Временную синхронизацию работы БФПУС 8 осуществляет ПВУ 11 (задает команду на разворот и генерирует гармонические функции).
Если система управления движением КА включает в свой состав БЦВМ, то последняя может не только быть использована как ВУ 7, но и выполнять функции блоков БОУО 6 и БФПУС 8. Вышеуказанные матрицы аппроксимирующих коэффициентов могут быть выполнены на ППЗУ.
Работает система, реализующая предлагаемый способ управления разворотом КА, следующим образом.
Исходя из имеющихся инерционных характеристик КА, в БОУО 6 выбирается соответствующая им матрица аппроксимирующих коэффициентов. По заданным установочным параметрам разворота с использованием выбранной матрицы коэффициентов вычисляется угол ν отклонения оси прецессии от продольной оси. В ВУ 7 решается задача наведения определение углов a,β и Φo - по параметрам разворота  и углу ν. По времени разворота T (информации с УВХВР) ВУ 7 вычисляет угловые скорости вращения
и углу ν. По времени разворота T (информации с УВХВР) ВУ 7 вычисляет угловые скорости вращения  , по которым совместно с vo БФПУС 8 формирует программное значение вектора угловой скорости
, по которым совместно с vo БФПУС 8 формирует программное значение вектора угловой скорости  . Одновременно ВУ 7 определяет и время разгона t. В момент поступления с ПВУ 11 команды на разворот ВУ 7 формирует управляющий момент (1), исходя из программных значений проекций вектора угловой скорости на связанные оси:
. Одновременно ВУ 7 определяет и время разгона t. В момент поступления с ПВУ 11 команды на разворот ВУ 7 формирует управляющий момент (1), исходя из программных значений проекций вектора угловой скорости на связанные оси:
где
При этом ВУ 7 выдает соответствующие сигналы в СПУ 9, которое и переводит их в соответствующие команды на исполнительные органы СИО 10. Во все время разворота контроль осуществляют ВУ 7 по информации от БДУС 4 И БИНС 5.
Как только фактическая угловая скорость КА станет равна  , система переходит в режим поддержания с высокой точностью заданной угловой скорости при условии:
, система переходит в режим поддержания с высокой точностью заданной угловой скорости при условии:
откуда получаются соответствующие программные значения управляющего момента (1).
При реализации предложенного способа непрерывно проводятся вычисление и интегрирование обобщенной угловой скорости, и в момент, когда накопленный обобщенный угол станет равен пороговому значению, производят торможение КА, прилагая момент (1) необходимого знака.
Момент начала торможения определяется из предположения, что при торможении (как и при разгоне) изменение величины кинетического момента происходит равномерно. Принимая величину
за обобщенную скорость, пропорциональную величине кинетического момента, находим условие (2), определяющее момент начала участка торможения, причем:
где m максимальная эффективность исполнительных органов.
Для большей точности определения момента начала торможения необходимо контролировать движение КА не только по угловой скорости, но и по фактически оставшемуся углу до конечного положения: ,
,
где N кватернион фактического углового положения КА.
Учитывая, что интеграл обобщенной скорости на участке торможения соотносится с данным углом доворота так же, как обобщенный угол с углом разворота, получим указанный выше критерий (3) формирования сигнала на торможение.
Отличительной особенностью при реализации способа является наличие процедуры определения оптимального направления оси прецессии КА в инерциальном пространстве, определения угла отклонения от этого направления продольной оси КА и углов поворота КА вокруг оси прецессии и продольной оси, а также наличие системы ориентации, обеспечивающей требуемое программное движение КА с высокой точностью, в ходе которого имеет место (4).
В момент выполнения (3) ВУ 7 выдает команду на торможение КА. Когда угловая скорость вращения обнуляется, выход ВУ 7 маскируется, исполнительные органы отключаются разворот окончен. Система готова к следующему маневру.
Эффективность предложенного способа определяется, прежде всего, значительным снижением потребной величины кинетического момента на разворот, что особенно важно при управлении КА инерционными исполнительными органами (силовыми гидроскопами системой гиродинов). Наибольший эффект достигается при разворотах на большие углы, когда ось Эйлера не лежит в поперечной плоскости КА. Результаты математического моделирования в зависимости от условий разворота приведены на фиг. 7 и 8. Предложенный способ наиболее целесообразен при управлении ориентацией крупных массивных КА типа орбитального комплекса "Мир" и позволит значительно расширить возможности по управлению и проведению научных экспериментов, так как дает весомый запас кинетического момента гиросистемы во время динамических операций.
Использование: в космической технике, для управления угловым положением космических аппаратов (КА), орбитальных станций и специализированных модулей. Сущность изобретения: автоматически определяют направление оси поворота КА в пространстве, обеспечивающее разворот КА с минимальным по величине кинетическим моментом; вычисляют углы поворотов вокруг найденной оси и продольной оси КА, необходимые для перевода его в конечное положение, причем формируют программный вектор угловой скорости согласно выбранной номинальной траектории вращения. Контроль за разворотом КА осуществляется непрерывно вычислительным устройством, а также блоком формирования программного вектора угловой скорости с подключением датчиков угловых скоростей и бесплатформенной инерциальной навигационной системы. Терминальный тип управления торможением КА существенно повышает точность ориентации. Разворот КА осуществляется экономично, т. к. вращение происходит с минимальным кинетическим моментом, что особенно важно при управлении КА с помощью инерционных исполнительных органов. 2 з.п. ф-лы, 8 ил.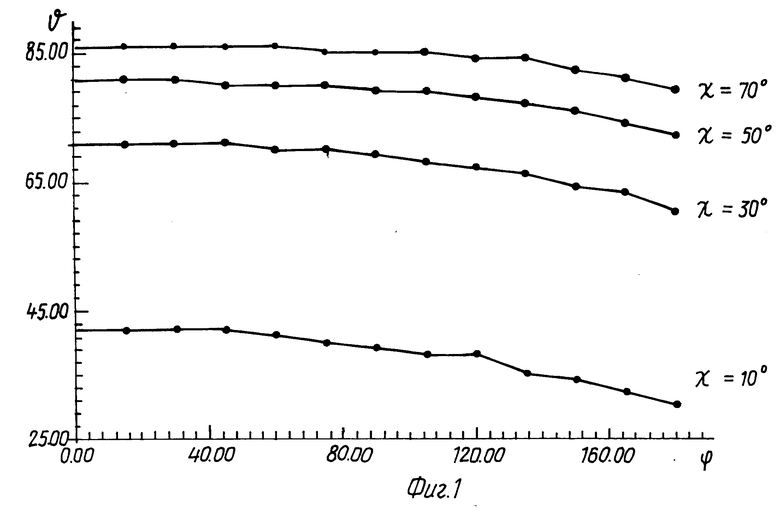

2. Способ по п.1, отличающийся тем, что торможение космического аппарата начинают с момента выполнения условия
где ωx - угловая скорость относительно продольной оси аппарата;
ωz,ωy - угловые скорости относительно поперечных осей аппарата;
t время с начала разворота;
τ - расчетное время торможения аппарата;
ψ - обобщенный угол разворота, определяемый выражением
Ψ = α+β(|cosν|+|sinν|).
3. Способ по пп.1 и 2, отличающийся тем, что определяют угол разворота от начального до требуемого конечного углового положения Φ, непрерывно измеряют угол разворота от текущего до требуемого конечного углового положения Φост, а торможение космического аппарата начинают с момента выполнения условия я
я
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Раушенбах Б.В., Токарь Е.Н | |||
| Управление ориентации космических аппаратов - М., 1974, с | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Алексеев К.Б., Бебенин Г.Г | |||
| Управление космическими летательными аппаратами | |||
| - М., 1974, с | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
