Предлагаемое изобретение относится к машиностроению, в частности к управляемым системам амортизации? и может найти применение при создании регулируемых и управляемых подвесок транспортных средств.
Известны конструкции управляемых амортизаторов и способы оптимального демпфирования колебаний агрегатов и оборудования [1, 2, 3, 4], однако они недостаточно эффективны для транспортных средств, имеющих значительный продольный размер и содержащих более двух управляемых амортизаторов.
Наиболее близким - по совокупности признаков - аналогом является способ демпфирования вынужденных колебаний объекта [5], в котором измеряют перемещения объекта с одной степенью свободы и деформацию упругого элемента, а жесткость C изменяют по закону
где ε = y - q(t) - деформация упругого элемента;
C0 - начальное значение жесткости;
|ΔC| - допустимое значение изменения жесткости;
y - величина перемещения объекта; - скорость перемещения объекта;
- скорость перемещения объекта;
q(t) - величина предварительной деформации упругого элемента.
Закон управления жесткостью реализуется в виде системы контроля и измерения параметров состояния объекта и демпфирующего устройства с подсистемами измерения перемещения и скорости объекта, деформации упругого элемента, формирования управляющих команд и устройства регулирования жесткости упругого элемента, воздействующего через кинематические звенья на объект, и обратные связи.
К числу достоинств данного способа следует отнести возможность оптимально управлять кинематически возбуждаемыми колебаниями поступательного движения объекта, а к числу недостатков - ограниченную область применения по отношению к демпфированию угловых колебаний объектов со многими степенями свободы и усложнением систем контроля и измерения параметров состояния объекта и упругого подвеса, формирования команд и увеличением числа каналов обратных связей.
Задача, для решения которой предназначен предлагаемый способ демпфирования колебаний, заключается в обеспечении эффективного гашения поступательно-угловых колебаний объектов со многими степенями свободы и упрощении системы управления жесткостью упругого подвеса.
Достигаемый технический результат, помимо перечисленных выше функциональных возможностей, заключается в том, что обеспечиваются следующие технические преимущества:
- поскольку способ предусматривает измерение угловой скорости, уменьшается число каналов контроля измерения параметров состояния объекта, формирования команд и обратных связей;
- уменьшение числа каналов формирования команд, в свою очередь, упрощает систему управления упругим подвесом;
- сокращение числа элементов и связей системы управления повышает надежность ее работы;
- использование закона управления жесткостью подвеса в форме принципа максимума обеспечивает устойчивую работоспособность системы демпфирования при наличии случайных воздействий, ошибок и помех;
- управление жесткостью подвеса по текущим значениям параметров состояния обеспечивает формирование управляющих команд в реальном масштабе времени.
Указанные технические результаты достигаются тем, что способ демпфирования колебаний упругоподвешенного объекта, подвес которого включает систему нескольких, в частности более двух, последовательно расположенных и параллельно ориентированных амортизаторов с управляемой по командам системы управления жесткостью, включающий измерение деформаций упругих элементов амортизаторов, а затем изменение их жесткости, - заключается в том, что измеряют скорость поступательного перемещения центра масс и угловую скорость объекта, а жесткости амортизаторов Cj изменяют по закону
где  - деформация j-го упругого элемента;
- деформация j-го упругого элемента;
Cj0 - начальное значение жесткости j-го упругого элемента;
|ΔCj| - допустимое значение изменения жесткости j-го упругого элемента; - скорость поступательного перемещения центра масс объекта;
- скорость поступательного перемещения центра масс объекта; - угловая скорость объекта;
- угловая скорость объекта;
ϕ - величина угла поворота объекта;
qj(t) - величина предварительной деформации j-го упругого элемента (величина кинематического воздействия);
xj - координата точки подвеса j-го упругого элемента относительно центра масс;
N - число амортизаторов подвеса.
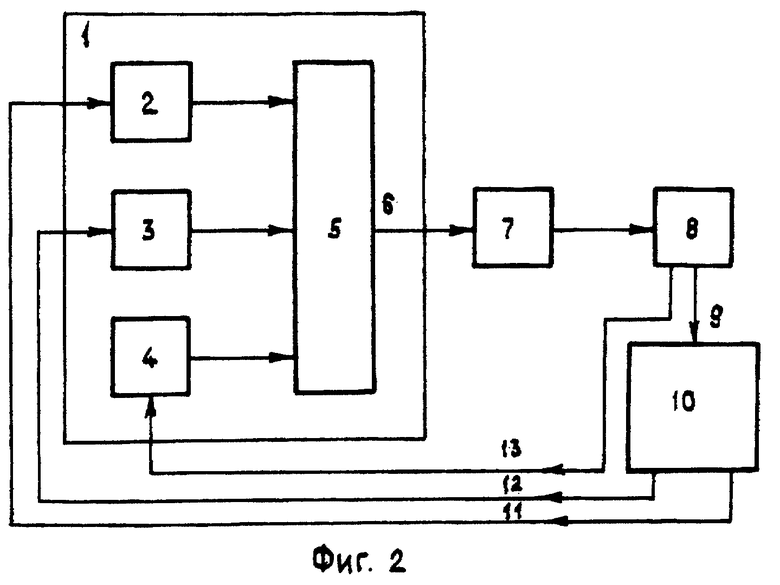
На фиг. 1 изображена схема подвеса объекта, на фиг. 2 - структурная схема способа, на фиг. 3, 4 - процессы демпфирования поступательных и угловых колебаний объекта, полученные в результате численного эксперимента.
Упругий подвес (см. фиг. 1) объекта 1 включает систему N последовательно расположенных и параллельно ориентированных амортизаторов  , жесткости которых обозначены Cj. Амортизаторы ориентированы перпендикулярно связанной с объектом продольной оси Ox.
, жесткости которых обозначены Cj. Амортизаторы ориентированы перпендикулярно связанной с объектом продольной оси Ox.
На фиг. 1 показаны:
- перемещения точек крепления амортизаторов yj;
- координаты точек крепления амортизаторов xj;
- угол поворота объекта ϕ;
- предварительные деформации - qj(t).
Закон управления жесткостью реализуется в виде (см. фиг. 2) системы контроля и измерения параметров состояния объекта и упругих элементов 1, содержащей подсистему измерения скорости центра масс 2, выполненную, например, в виде датчика ускорения с последовательно подключенным к нему апериодическим звеном; подсистему измерения угловой скорости 3, выполненную, например, в виде акселерометра или гироскопа; подсистему измерения деформации упругого элемента 4, выполненную, например, в виде тензометрической балки или емкостного датчика, подсистему формирования команд 5, содержащую, например, систему соединенных в определенном порядке реле, вырабатывающих сигнал 6, который подается в устройство регулирования жесткости 7, выполненное, например, в виде управляемого электропневмоклапана, разделяющего полость пневмоцилиндра демпфирующего устройства 8 и воздействующего через кинематические звенья 9 на объект 10, при этом сигналы о состоянии каждого из демпфирующих устройств 8 и объекта 10 по каналам обратной связи 11, 12, 13 подаются на вход системы контроля и измерения параметров состояния 1.
Сущность и предлагаемый закон изменения жесткости поясняются следующим образом. Структура уравнений, описывающих поступательно-угловые колебания объекта, например, с двумя степенями свободы и системой последовательно установленных амортизаторов, имеет вид
где m - масса объекта;
J - момент инерции объекта относительно главной центральной оси.
Так как величина
yj = y0+xjϕ (5)
есть перемещение точки подвеса j-го демпфирующего элемента, то разность
εj = y0+xjϕ-qj(t) (6)
является деформацией j-го демпфирующего элемента, которую можно измерить посредством, например, тензометрических или емкостных датчиков. Доказательство строится на основе применения к уравнениям (3), (4) принципа максимума Л.С.Понтрягина и теоремы о мгновенно-оптимальном управлении [4, 6, 7] .
Пусть требуется снизить энергию колебательного движения объекта  до некоторого заданного значения T(tk) = T. за минимальное время
до некоторого заданного значения T(tk) = T. за минимальное время
Введем множитель Лагранжа λ. Используя теорему о мгновенно-оптимальном управлении [6, 7], умножим уравнение (3) на величину  , а уравнение (4) на величину
, а уравнение (4) на величину  и составим расширенный функционал
и составим расширенный функционал
Применяя к функционалу (8) процедуру игольчатого варьирования управления [4] , каковыми здесь являются жесткости амортизаторов Cj, получим условие их оптимальности в форме принципа максимума для функции Гамильтона
где  - оптимальное значение жесткости упругого элемента;
- оптимальное значение жесткости упругого элемента; - область допустимых значений жесткости.
- область допустимых значений жесткости.
В формуле (9) произведем простые преобразования и получим
Используя теперь приведенную ранее известную формулу (6), получим
А далее, применяя к (11) принцип максимума и полагая λ = -1, окончательно имеем закон оптимального демпфирования поступательно-угловых колебаний объекта
что и требовалось доказать.
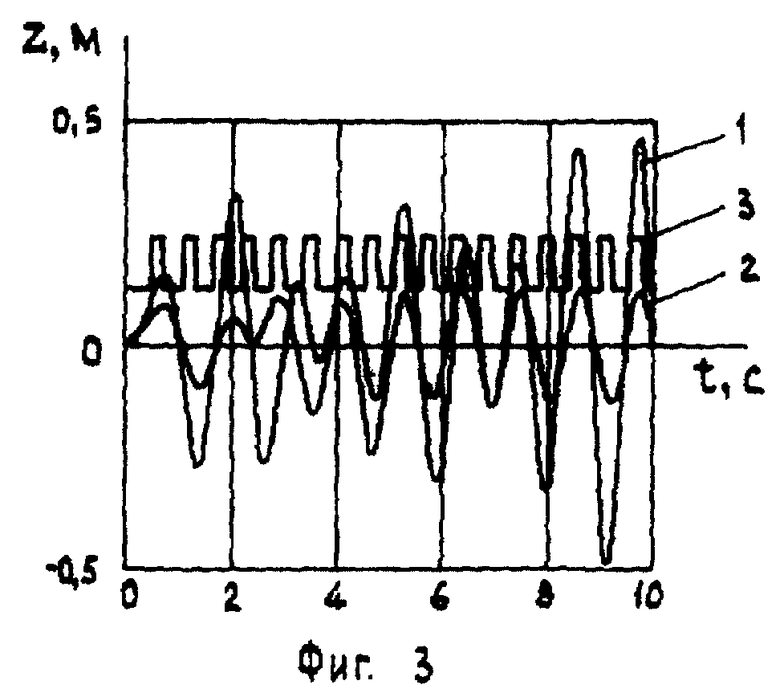
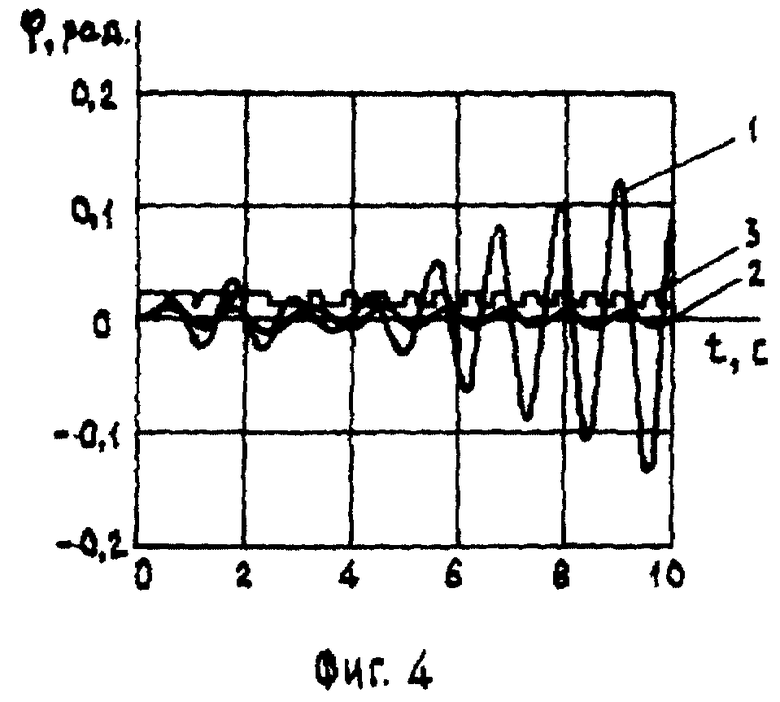
На фиг. 3 и 4 показаны в сравнении колебательные процессы поступательного и вращательного движений соответственно при предлагаемом оптимальном и ранее известных способах демпфирования для объекта, обладающего следующими техническими характеристиками:
- масса m = 28·103 кг;
- момент инерции J = 8,5·105 кг·м2;
- начальное значение жесткости Cj0 =  ;
;
- допустимое значение изменения жесткости  ;
;
- закон кинематического возбуждения колебаний
q1(t) = 0,2sin5,585t, м;
q2(t) = 0,2sin(5,585t - 12,57), м;
- расстояние между точками крепления амортизаторов L = 18 м;
- координаты точек крепления амортизаторов x1 = 7,2 м; x2 = -10,8 м.
На фиг. 3 представлены: линия 1 - поступательные колебания объекта при резонансном воздействии и традиционном демпфировании; линия 2 - поступательные колебания объекта при оптимальном демпфировании; линия 3 - алгоритм изменения жесткости C1(t) - первого амортизатора.
На фиг. 4 представлены: линия 1 - угловые колебания объекта при резонансном воздействии и традиционном демпфировании; линия 2 - угловые колебания объекта при оптимальном демпфировании; линия 3 - алгоритм изменения жесткости C2(t) - второго амортизатора.
Сравнительная оценка амплитуд колебательных процессов показывает более высокую - по быстродействию - эффективность предлагаемого способа демпфирования колебаний по сравнению с известными аналогами.
Из уравнения (12) видно, что в случае управления жесткостью по деформации εj и скоростью точки подвеса j-го амортизатора  , как обосновано в прототипе, потребуется 2N каналов измерения параметров состояния εj и yj, N каналов формирования команд управления, 2N каналов обратной связи, т.е. всего каналов
, как обосновано в прототипе, потребуется 2N каналов измерения параметров состояния εj и yj, N каналов формирования команд управления, 2N каналов обратной связи, т.е. всего каналов
S=2N+N+2N=5N. (13)
Для предлагаемого способа потребуется N+2 каналов измерения параметров состояния; N каналов формирования команд, N+2 каналов обратной связи, т.е. всего каналов
Сравнение (13) и (14) дает величину выигрыша
Кроме того, если учесть, что общее количество вспомогательных устройств - датчиков, апериодических звеньев и других элементов - также существенно уменьшится, то преимущества предлагаемого способа демпфирования колебаний по сравнению с прототипом становятся еще более существенными.
Таким образом, можно сделать выводы, что перечисленное сочетание качеств доказывает эффективность и широкие функциональные возможности предлагаемого способа и обеспечивает следующие технические преимущества по сравнению с известными аналогами:
- амплитуда колебаний слабо зависит от частоты воздействия, в том числе и в резонансной области, что подтверждается результатами вычислительного эксперимента, представленными на графиках (см. фиг. 3, 4);
- при расширении области допустимых значений изменения жесткости до значения |ΔCj| = |Cj0| колебания объекта демпфируются полностью;
- формирование команд управления жесткостью по деформации упругого элемента и угловой скорости существенно упрощает систему контроля и измерения параметров состояния объекта и, соответственно, подсистему формирования сигнала.
Предлагаемый способ оптимального демпфирования наиболее эффективен для транспортных средств, имеющих значительный продольный размер и содержащих более двух управляемых амортизаторов, и для которых плавность хода существенно влияет на их живучесть и время передислокации из одного района базирования в другой.
Литература
1. Бутковский А.Г. Методы управления системами с распределенными параметрами. М.: Наука., 1975, -568 с.
2. Варава В.И. Прикладная теория амортизации транспортных машин. Л.: - Издательство Ленинградского университета, 1986, -186 с.
3. Нашиф А., Джоунс Д., Хендерсон Дж. Демпфирование колебаний. М.: Мир, 1998, -448 с.
4. Понтрягин Л.С. Математическая теория оптимальных процессов. М.: Наука, 1976, -392 с.
5. Авторское свидетельство СССР N1787810 от 14.08.90 г., B 60 G 17/02, 23/00 "Способ демпфирования вынужденных колебаний объекта".
6. Комков В. Теория оптимального управления демпфированием колебаний простых упругих систем. М.: Мир, 1975, -158 с.
7. Костоглотов А.И., Воробьев С.А., Кулешов А.В. Оптимальное управление колебаниями многомассовых систем с упругими связями. М.: ЦВНИ МОРФ, серия В, выпуск 42, 1998.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТООПТИЧЕСКИЙ ОРИЕНТАТОР | 2000 |
|
RU2167395C1 |
| Способ демпфирования вынужденных колебаний объекта | 1990 |
|
SU1787810A1 |
| ЭНЕРГОПОГЛОЩАЮЩЕЕ УСТРОЙСТВО | 1999 |
|
RU2156898C1 |
| АЗИМУТАЛЬНЫЙ МАГНИТООПТИЧЕСКИЙ ОРИЕНТАТОР | 1999 |
|
RU2156439C1 |
| Способ оптимального демпфирования вынужденных колебаний транспортного агрегата | 1991 |
|
SU1808745A1 |
| СПОСОБ ТОРМОЖЕНИЯ УГЛОВОЙ СКОРОСТИ КОСМИЧЕСКОГО АППАРАТА | 2001 |
|
RU2211789C2 |
| Способ и устройство одновременного динамического гашения колебаний объекта защиты по двум степенями свободы | 2017 |
|
RU2700942C1 |
| ДЕКОМПОЗИЦИОННЫЙ ЛИНЕЙНЫЙ ФИЛЬТР | 2000 |
|
RU2170946C1 |
| ОПТИЧЕСКИЙ АКСЕЛЕРОМЕТР | 1999 |
|
RU2156979C1 |
| ПРОСТРАНСТВЕННЫЙ МАГНИТООПТИЧЕСКИЙ ОРИЕНТАТОР | 2001 |
|
RU2191349C1 |
Изобретение относится к машиностроению, в частности к управляемым системам амортизации. Способ демпфирования колебаний упругоподвешенного объекта, подвес которого содержит более двух последовательно расположенных и параллельно ориентированных амортизаторов, заключается в том, что измеряют скорость центра масс и угловую скорость объекта, а жесткости амортизаторов Cj изменяют по закону  ,
,  , где
, где  - деформация j-го упругого элемента; Сjo - начальное значение жесткости j-го упругого элемента;
- деформация j-го упругого элемента; Сjo - начальное значение жесткости j-го упругого элемента;  - допустимое значение изменения жесткости j-го упругого элемента;
- допустимое значение изменения жесткости j-го упругого элемента;  - скорость поступательного перемещения центра масс объекта;
- скорость поступательного перемещения центра масс объекта;  - угловая скорость объекта; qj(t) - величина предварительной деформации j-го упругого элемента (величина кинематического воздействия); xj - координата точки подвеса j-го упругого элемента относительно центра масс; N - число амортизаторов подвеса. Технический результат - обеспечение эффективного гашения поступательно-угловых колебаний объектов со многими степенями свободы и упрощение системы управления жесткостью упругого подвеса. 4 ил.
- угловая скорость объекта; qj(t) - величина предварительной деформации j-го упругого элемента (величина кинематического воздействия); xj - координата точки подвеса j-го упругого элемента относительно центра масс; N - число амортизаторов подвеса. Технический результат - обеспечение эффективного гашения поступательно-угловых колебаний объектов со многими степенями свободы и упрощение системы управления жесткостью упругого подвеса. 4 ил.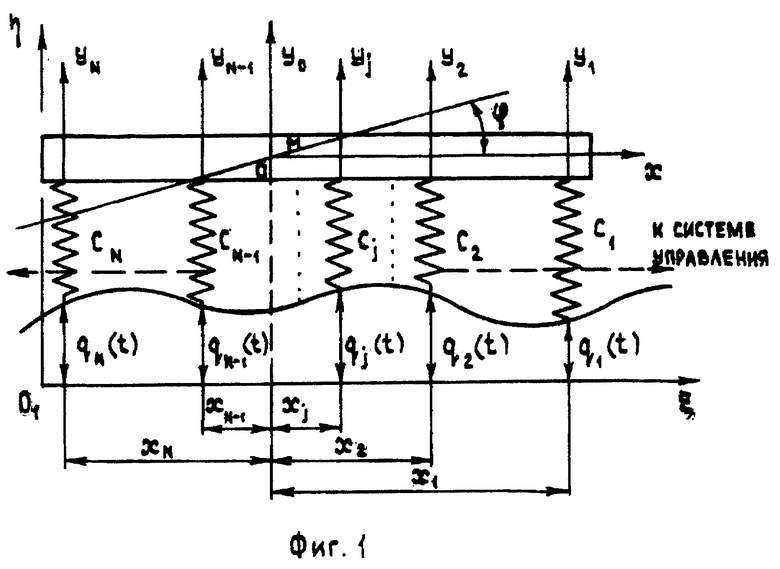
Способ демпфирования колебаний упругоподвешенного объекта, подвес которого содержит более двух последовательно расположенных и параллельно ориентированных амортизаторов, заключающийся в том, что измеряют деформацию упругих элементов амортизаторов, а затем изменяют жесткость, отличающийся тем, что измеряют скорость поступательного перемещения центра масс  и угловую скорость
и угловую скорость  объекта, а жесткости амортизаторов Cj изменяют по закону
объекта, а жесткости амортизаторов Cj изменяют по закону

где  - деформация j-го упругого элемента;
- деформация j-го упругого элемента;
Cj0 - начальное значение жесткости j-го упругого элемента;
|ΔCj| - допустимое значение изменения жесткости j-го упругого элемента; - скорость поступательного перемещения центра масс объекта;
- скорость поступательного перемещения центра масс объекта; - угловая скорость объекта;
- угловая скорость объекта;
ϕ - величина угла поворота объекта;
qj(t) - величина предварительной деформации j-го упругого элемента (величина кинематического воздействия);
xj - координата точки подвеса j-го упругого элемента относительно центра масс;
N - число амортизаторов подвеса.
| Способ демпфирования вынужденных колебаний объекта | 1990 |
|
SU1787810A1 |
| Способ управления гидропневматической подвеской транспортного средства | 1972 |
|
SU487794A1 |
| SU 988147, 28.02.1983 | |||
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
| DE 3638574 A1, 26.05.1988 | |||
| РЕВЕРСИВНЫЙ КЛАПАН ДЛЯ КОКСОВАЛЬНЫХ ПЕЧЕЙ | 0 |
|
SU217360A1 |
