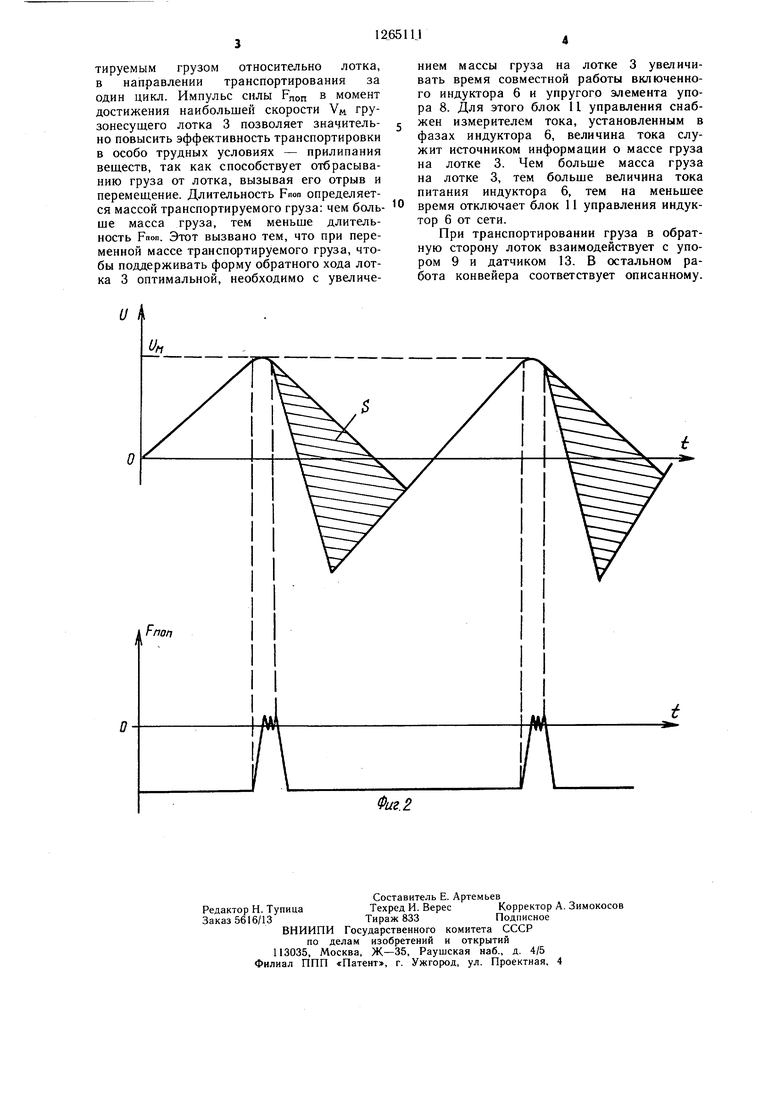
Изобретение относится к подъемно-транспортному машиностроению, а именно к вибрационным конвейерам, и может быть использовано для транспортирования сыпучих, штучных и вязких материалов в различных отраслях промышленности. Цель изобретения - повышение производительности и расширение технологических возможностей конвейера за счет сушки транс портируемого материала. На фиг. 1 изображен инерционный конвейер, обш,ий вид, в разрезе; на фиг. 2 - зависимость скорости движения и график изменения импульса силы, сообщаемого лотку в поперечном направлении, в зави;симости от времени. Инерционный конвейер имеет основание 1 с роликами 2, лоток 3, выполненный в виде жесткой конструкции из ферромагнитного материала и установленный на ролики 2. Приемная воронка 4 установлена в месте поступления транспортируемого груза, в этом месте под грузонесущим лотком жестко и плотно к нему прикреплена пластина 5 из неферромагпитного металла с большой электропроводностью, например медь, алюминий и др., а на некотором расстоянии параллельно груз онесуш.ему лотку установлен индуктор 6 линейного асинхронного электродвигателя. Пластина 5 имеет длину большую, чем индуктор 6. Движение лотка 3, имеюш.его выступы 7, ограничивается с одной стороны упругим упором 8, а с другой стороны - упругим упором 9, выполненными в виде пружин сжатия и стоек. Упоры 8 и 9 закреплены неподвижно на основании 1. Ролики 2 установлены посредством пружин 10 на основании 1. Индуктор 6 подключается к сети трехфазного переменного тока через блок 11 управления. Блок управления может быть выполнен на основе схемы тиристорного пускателя типа ПТ. На упорах 8 и 9 установлены датчики 12 и 13 положения лотка, которые срабатывают от взаимодейстВИЯ с выступом 7, и соединены с блоком 11 управления, например, параллельно кнопкам «Вперед и «Пазад пускателя ПТ. Выступ 14 предотвращает соприкосновение индуктора б с пластиной 5. ИнерционнЕлй конвейер работает следующим образом. Блок 11 управления подключает индуктор 6 к сети. Индуктор создает бегущее магнитное поле, направленное вдоль проводяп ей пластины 5, индуцирует в ней ЭДС и электрический ток. При взаимодействии бегущего магнитного поля и электрического тока, индуцируемого в пластине 5, возникает сила, приводящая лоток 3 в движение на роликах 2. Одновременно ферромагнитный лоток 3 с пластиной 5 притягивается к индуктору 6 и под воздействием индуцируемых токов нагревается до требуемой температуры. Под действием силы притяжения лоток 3 через ролики 2 сжимает пружину 10 и уменьшает воздушный зазор между пластиной 5 и индуктором 6. Жесткость пружин 10 устанавливается применительно к конкретному конвейеру, исходя из того, что при поступлении груза на лоток 3 они дополнительно сжимаются. Величина сжатия и уменьшения воздушного зазора между индуктором 6 и пластиной 5 при этом пропорциональны массе транспортируемого груза. Направление движения лотка 3 определяется порядком включения фаз напряжения, питающего индуктор 6, например, в сторону упора 8. Механическая характеристика линейного асинхронного двигателя за счет выбора параметров индуктора 6, пластины 5 и лотка 3 должна быть такой, чтобы скорость лотка 3 увеличивалась линейно во времени с определенным постоянным ускорением, определяемым коэффициентом трения транспортируемого груза. В момент достижения лотком наибольшей скорости VM выступ 7 взаимодействует с датчиком 12- на упоре 8. Датчик 12 срабат)1вает, при этом блок 11 управления кратковременно отю ючает индуктор 6 от сети. Сила притяжения лотка 3 индуктором 6 исчезает, при этом пружины 10 разжимаются, лоток 3 получает импульсное воздействие в поперечном направлении снизу вверх Fnon. Амплитуда импульса Fnon определяется инерционно жесткостными свойствами системы поперечных движений и устанавливается применительно к конкретному конвейеру. Импульс силы рчор.в момент достижения лотком 3 наибольшей скорости VM в направлении упругого упора 8 прижимает груз к несущей поверхности и в пределе сообщает грузу скорость, равную скорости лотка 3, затем подкидывает груз, так как блок 11 управления включает индуктор 6 с обратным порядком чередования фаз питания, лоток 3 прижимается к индуктору 6 и под действием пружины упругого упора 8 и бегущего магнитного поля индуктора 6 с резко уменьшающейся затем с возрастающей скоростью возвращается в исходное положение до выключения датчика 12 выступом 7. При этом блок 11 управления повторно переключает фазы питания, питающего индуктор 6, лоток 3 с у-меньшаюп 1ейся скоростью продолжает движение в сторону упора 9. В какой-то момент времени он остановится и начнет движение в сторону упора 8 с линейно возрастающей скоростью. Дальнейшая работа устройства повторяется согласно описанному. Транспортируемый груз с момента достижения лотком 3 скорости VM по инерции продвигается по лотку 3, так как ускорение движения грузонесущего лотка резко меняет знак. Заштрихованная площадь S {фиг. 2) представляет собой путь, пройденный транспортируемым грузом относительно лотка, в направлении транспортирования за один цикл. Импульс силы РПОП в момент достижения наибольшей скорости VM грузонесущего лотка 3 позволяет значительно повысить эффективность транспортировки в особо трудных условиях - прилипания веществ, так как способствует отбрасыванию груза от лотка, вызывая его отрыв и перемещение. Длительность Рпоп определяется массой транспортируемого груза: чем больще масса груза, тем меньше длительность РПОП. Этот вызвано тем, что при переменной массе транспортируемого груза, чтобы поддерживать форму обратного хода лотка 3 оптимальной, необходимо с увеличением массы груза на лотке 3 увеличивать время совместной работы включенного индуктора 6 и упругого элемента упора 8. Для этого блок 11 управления снабжен измерителем тока, установленным в фазах индуктора 6, величина тока служит источником информации о массе груза на лотке 3. Чем больше масса груза на лотке 3, тем больше величина тока питания индуктора 6, тем на меньшее время отключает блок 11 управления индуктор 6 от сети.
При транспортировании груза в обратную сторону лоток взаимодействует с упором 9 и датчиком 13. В остальном работа конвейера соответствует описанному.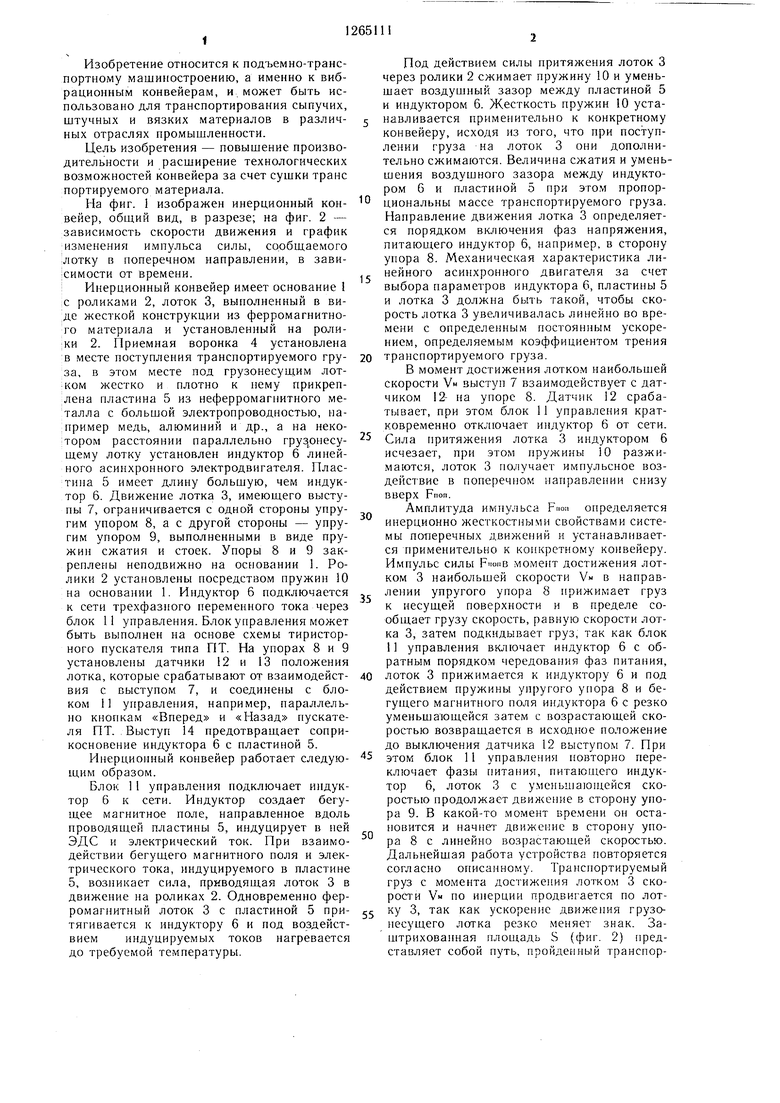
| название | год | авторы | номер документа |
|---|---|---|---|
| Инерционный конвейер | 1986 |
|
SU1400983A1 |
| ИНЕРЦИОННЫЙ КОНВЕЙЕР | 2010 |
|
RU2422348C1 |
| Инерционный конвейер | 1990 |
|
SU1728095A1 |
| Инерционный конвейер | 1989 |
|
SU1666407A1 |
| ИНЕРЦИОННЫЙ КОНВЕЙЕР | 2013 |
|
RU2523727C1 |
| Вибрационный конвейер | 1986 |
|
SU1630999A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР | 2000 |
|
RU2193515C2 |
| ВИБРАЦИОННЫЙ КОНВЕЙЕР | 2002 |
|
RU2213685C1 |
| Промежуточный привод наклонного ленточного конвейера | 1982 |
|
SU1033389A1 |
| Способ транспортирования грузов многосекционным вибрационным конвейером | 1989 |
|
SU1722986A1 |
1. ИНЕРЦИОННЫЙ КОНВЕЙЕР, содержащий установленный на основании на роликах лоток с возможностью взаимодействия с упругим упором, расположенным на основании, и вибропривод, отличающийся тем, что, с целью повышения производительности и расширения технологических возможностей конвейера за счет сушки транспортируемого материала, виброi / привод выполнен в виде установленного на основании под лотком индуктора линейного асинхронного электродвигателя с блоком управления и жестко закрепленной на нижней части лотка пластины из неферромагнитного металла, а упругий упор снабжен датчиком перемещения лотка, связанным с блоком управления, при этом ролики выполнены подпружиненными относительно основания, а пластина расположена над индуктором, причем ее длина больше длины индуктора. 2.Конвейер по п. 1, отличающийся тем, что он снабжен установленным на основании с возможностью взаимодействия с лотком дополнительным упругим упором и расположенным на нем дополнительным датчи ком перемещения лотка, связанным с бло(Л ком управления, 3.Конвейер по п. 1, отличающийся тем, что вибропривод имеет дополнительные индукторы линейного асинхронного электродвигателя. 1C 5 о:) СП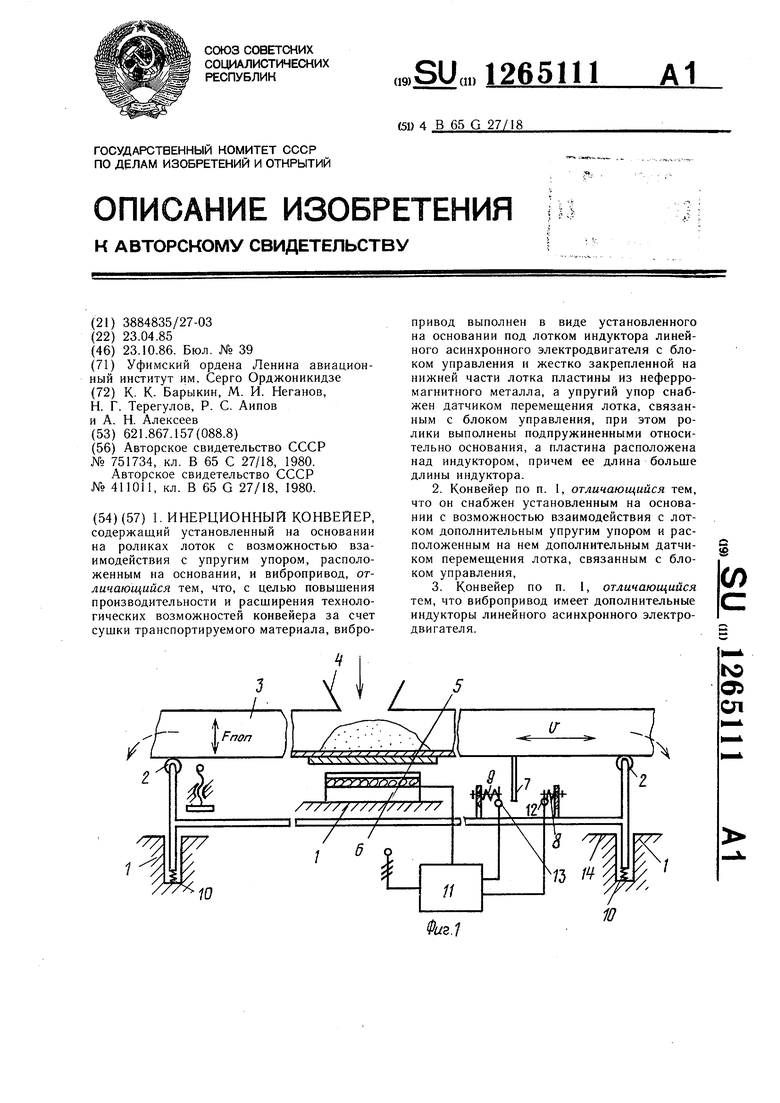
| Вибрационный конвейер | 1978 |
|
SU751734A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Механический грохот | 1922 |
|
SU41A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
