Изобретение относится к вибрационной технике, а именно к инерционным конвейерам, и может быть использовано для транспортирования сыпучих материалов в различных отраслях промышленности.
Известен инерционный конвейер, содержащий лоток с приводом в виде двигателя вращения с кривошипно-шатунным механизмом [1].
Недостатками технического решения являются низкая надежность работы из-за большого числа трущихся и изнашивающихся поверхностей, наличие больших динамических усилий на привод, сложность регулирования параметров колебания лотка и, как следствие, производительности конвейера.
Наиболее близким к предлагаемому техническому решению является инерционный конвейер, содержащий лоток с транспортирующей поверхностью, установленный на основании на роликах с возможностью взаимодействия с упругими упорами, расположенными на основании, вибропривод в виде расположенного на основании индуктора линейного асинхронного двигателя и ротора, установленного на лотке на направляющих с возможностью нормального перемещения по отношению к транспортирующей поверхности лотка и связанного с ним посредством упругих элементов, блок управления виброприводом, связанный с датчиками положения лотка [2].
Применение линейного асинхронного двигателя в качестве вибропривода инерционного конвейера повышает надежность технического решения, устраняет сложность регулирования параметров колебания лотка, следовательно, повышает производительность конвейера.
Однако недостатками данного технического решения являются длительные пусковые токи и, как следствие, большие пусковые силы, что приводит к проскальзыванию материала против направления транспортирования при пуске конвейера, что негативно влияет на производительность. Для получения малых скоростей транспортирования возникают необходимость остановки движения лотка и его повторный пуск. Каждый пуск будет сопровождаться большими пусковыми токами, рывками и большими динамическими нагрузками.
Изобретение позволит повысить производительность конвейера.
Технический результат достигается тем, что индуктор линейного асинхронного двигателя расположен на основании на роликах с возможностью возвратно-поступательного перемещения параллельно направлению транспортирования и связан с основанием упругим элементом.
На чертеже показан общий вид предлагаемого конвейера.
Инерционный конвейер содержит установленный на основании 1 на роликах 2 лоток 3 жесткой конструкции. На основании 1 под лотком 3 на роликах 4 установлен индуктор 5 линейного асинхронного двигателя, который связан с основанием 1 посредством упругого элемента 6, выполненного в виде пружины сжатия-растяжения. На лотке 3 со стороны, обращенной к индуктору 5, на направляющих 7 с возможностью нормального перемещения по отношению к транспортирующей поверхности лотка 3 установлен ротор 8 линейного асинхронного двигателя, который прикреплен к лотку 3 с помощью упругих элементов 9 и выполнен в виде соединенных между собой двух пластин 10 и 11. Пластина 10 выполнена из неферромагнитного материала с большой электропроводностью, например алюминий, а пластина 11 - из ферромагнитного материала.
Необходимый и минимальный воздушный зазор между индуктором 5 и ротором 8 обеспечивается роликами 12, расположенными около индуктора 5. Ролики 2, 4 и 12 расположены в плоскостях, параллельных направлению транспортирования. Ротор 8 имеет длину большую, чем длина индуктора 5, на сумму величин хода лотка 3 и индуктора 5. На лотке 3 выполнены выступы 13 и 14, взаимодействующие с упругими упорами 15 и 16, закрепленными на основании 1. Упругие упоры 15 и 16 выполнены в виде пружин сжатия. Индуктор 5 подключается к сети трехфазного переменного тока через блок управления 17. Около упругих упоров 15 и 16 установлены датчики 18 и 19 положения лотка, электрически соединенные с блоком управления 17.
Инерционный конвейер работает следующим образом.
Блок управления 17 подключает индуктор 5 к сети трехфазного переменного тока. Индуктор создает бегущее магнитное поле (вдоль ротора 8) в направлении упругого упора, например 16, которое прикладывает к пластине 11 ротора 8 силу, направленную к индуктору 5. Под действием этой силы ротор 8 перемещается в направляющих 7 и ложится на ролики 12, растягивая при этом упругие элементы 9. Одновременно в роторе 8 индуцируются электродвижущая сила и электрический ток. При взаимодействии бегущего магнитного поля и электрического тока в роторе возникает электромагнитная сила между индуктором 5 и ротором 8, которая стремится привести в движение ротор 8 в направлении бегущего магнитного поля, а индуктор 5 - против него. Так как масса индуктора 5 меньше чем сумма масс груза 20, ротора 8 и лотка 3, то в первую очередь в движение приходит индуктор 5 и начинает сжимать упругий элемент 6, который при этом накапливает потенциальную энергию. По мере сжатия упругого элемента 6 возрастает его сила сопротивления, и индуктор 5 постепенно замедляет ход. В это время с ускорением начинает движение ротор 8, который влечет за собой лоток 3 и груз 20. По мере разгона ротора 8 упругий элемент 6 разжимается, при этом индуктор 5 движется в направлении исходного положения, тем самым обеспечивается дальнейший разгон лотка.
В момент достижения выступом 14 упругого упора 16 срабатывает датчик 19. На блок управления 17 поступает сигнал начала взаимодействия выступа 14 лотка 3 с упругим упором 16. По этому сигналу блок управления 17 отключает индуктор 5 от сети. При этом ротор 8 под действием сил растянутых упругих элементов 9 ударно прижимается к лотку 3 и затем начинает колебаться с частотой, определяемой массой ротора 8 и суммарной жесткостью упругих элементов 9. Одновременно лоток 3 интенсивно тормозится упругим упором 16, останавливается и начинает движение в обратную сторону. При этом по инерции груз 20 продолжает двигаться в направлении упругого упора 16. После полной передачи упругим упором 16 запасенной потенциальной энергии лоток 3 продолжает движение на роликах 2 в сторону упругого упора 15. В определенный момент времени упор 15 начинает взаимодействовать с выступом 13 лотка 3, что приводит к интенсивному торможению последнего. После остановки лотка 3, под действием запасенной потенциальной энергии упора 15, начинается его движение в противоположную сторону. В момент прекращения взаимодействия выступа 13 лотка 3 с упругим упором 15 срабатывает датчик 18. По сигналу датчика 18 блок управления 17 через заданное время повторно подключает индуктор 5 к сети трехфазного тока, и описанный процесс повторяется.
Транспортируемый груз 20 с момента начала взаимодействия лотка 3 с упругим упором 16 по инерции продвигается по лотку 3, так как ускорение движения грузонесущего органа резко меняет знак.
Плавность пуска конвейера определяется жесткостью упругого элемента 6. Он обеспечивает плавное изменение ускорения грузонесущего органа, что предотвращает проскальзывание груза против направления транспортирования, тем самым повышается производительность конвейера. Одновременно с этим упругий элемент 6 при разжимании способствует увеличению скорости движения лотка 3 перед взаимодействием последнего с упругим элементом 16, что способствует дополнительному повышению производительности технического решения.
Производительность конвейера регулируется путем изменения блоком управления 17 частоты и длительности включения линейного асинхронного двигателя.
Источники информации
1. Спиваковский А.О., Дьячков В.К. Транспортирующие машины: Учебн. пособие для машиностроительных вузов, 3-е издание, перераб., М.: Машиностроение, 1983, 487 с.
2. Инерционный конвейер: авторское свидетельство, 1666407: МКИ B65G 27/18, 27/24 / Р.С.Аипов, К.К.Барыкин, Н.Г.Терегулов, Ю.В.Абоймов (СССР). - №4724021/03: заявл. 27.07.89; опубл. 30.07.91. Бюл. №28. - 3 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Инерционный конвейер | 1990 |
|
SU1728095A1 |
| ИНЕРЦИОННЫЙ КОНВЕЙЕР | 2013 |
|
RU2523727C1 |
| Инерционный конвейер | 1989 |
|
SU1666407A1 |
| Инерционный конвейер | 1985 |
|
SU1265111A1 |
| Инерционный конвейер | 1986 |
|
SU1400983A1 |
| Вибрационный конвейер | 1986 |
|
SU1630999A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР | 2000 |
|
RU2193515C2 |
| ВИБРАЦИОННЫЙ КОНВЕЙЕР | 2002 |
|
RU2213685C1 |
| Способ вибрационного транспортирования фуражного зерна и других сыпучих материалов | 2016 |
|
RU2617280C1 |
| ШАГАЮЩИЙ КОНВЕЙЕР | 2008 |
|
RU2364564C1 |
Инерционный конвейер содержит установленный на основании (1) на роликах (2) лоток (3) жесткой конструкции. Под лотком на роликах (4) установлен индуктор (5) линейного асинхронного двигателя, который связан с основанием посредством упругого элемента (6), выполненного в виде пружины сжатия-растяжения. На лотке со стороны, обращенной к индуктору, на направляющих (7) установлен ротор (8) линейного асинхронного двигателя. Ротор прикреплен к лотку с помощью упругих элементов (9) и выполнен в виде соединенных между собой двух пластин (10, 11) из неферромагнитного материала и ферромагнитного материала соответственно. Повышается производительность конвейера. 1 ил.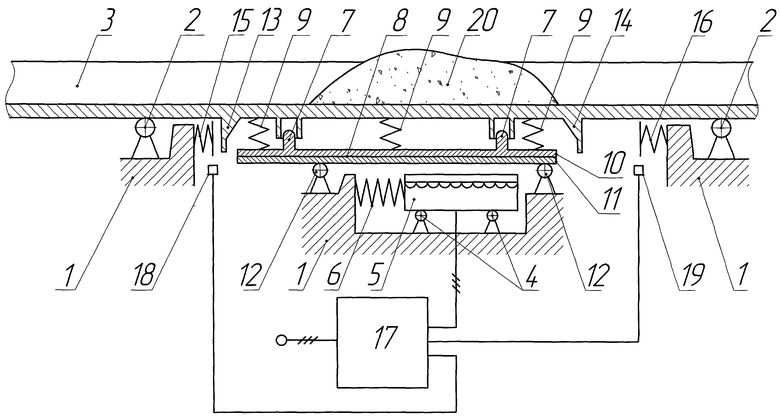
Инерционный конвейер, содержащий лоток с транспортирующей поверхностью, установленный на основании на роликах с возможностью взаимодействия с упругими упорами, расположенными на основании, вибропривод в виде расположенного на основании индуктора линейного асинхронного двигателя и ротора, установленного на лотке на направляющих с возможностью нормального перемещения по отношению к транспортирующей поверхности лотка и связанного с ним посредством упругих элементов, блок управления виброприводом, связанный с датчиками положения лотка, отличающийся тем, что индуктор линейного асинхронного двигателя расположен на основании на роликах с возможностью возвратно-поступательного перемещения параллельно направлению транспортирования и связан с основанием упругим элементом.
| Инерционный конвейер | 1989 |
|
SU1666407A1 |
| Способ вибрационного транспортирования штучных грузов и устройство для его осуществления | 1986 |
|
SU1630998A1 |
| Инерционный конвейер | 1986 |
|
SU1400983A1 |
| Инерционный конвейер | 1985 |
|
SU1265111A1 |
| US 2005115807 A1, 02.06.2005. | |||

