Изобретение относится к области промышленного транспорта, а именно к шагающим конвейерам, и может быть использовано для периодического перемещения штучных грузов по отдельным операциям технологического процесса в различных отраслях промышленности.
Известен шагающий конвейер, содержащий подвижную раму (транспортирующий элемент) на опорных катках внутри неподвижной рамы и привода подвижной рамы [1].
Недостатком такого технического решения является наличие двух отдельных приводов возвратно-поступательного движения подвижной рамы - в плоскости направления транспортирования и в плоскости, перпендикулярной к последней. Сказанное усложняет конструкцию конвейера, увеличивает его стоимость и повышает эксплуатационные расходы.
Наиболее близким по технической сущности к предлагаемому шагающему конвейеру является конвейер, содержащий неподвижную раму, установленную на основании, с упругим транспортирующим элементом, связанным с приводами, реализующими возвратно-поступательное движение в плоскости направления транспортирования и перпендикулярной к ней [2].
Недостатком этого технического решения является быстрый износ транспортирующего элемента и невозможность обеспечения одинакового шага перемещения по длине транспортирования, так как транспортирующий элемент является эластичным по всей длине.
Целью изобретения является упрощение привода конвейера, расширение возможностей его применения и повышение надежности работы.
Это достигается тем, что привод выполнен в виде плоского линейного асинхронного двигателя (ЛАД), причем индукторы которого жестко закреплены на основании под неподвижной рамой, а единым жестким ротором является транспортирующий элемент.
Предлагаемое устройство позволяет транспортировать различные штучные грузы с точным, регулируемым шагом и направлением перемещения, что расширяет возможности его применения.
Повышение надежности работы и упрощение привода конвейера достигается тем, что один и тот же ЛАД реализует движение жесткого транспортирующего элемента одновременно в двух плоскостях.
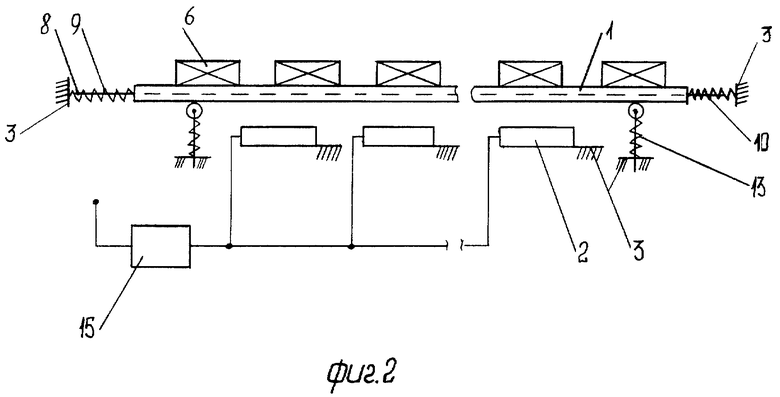
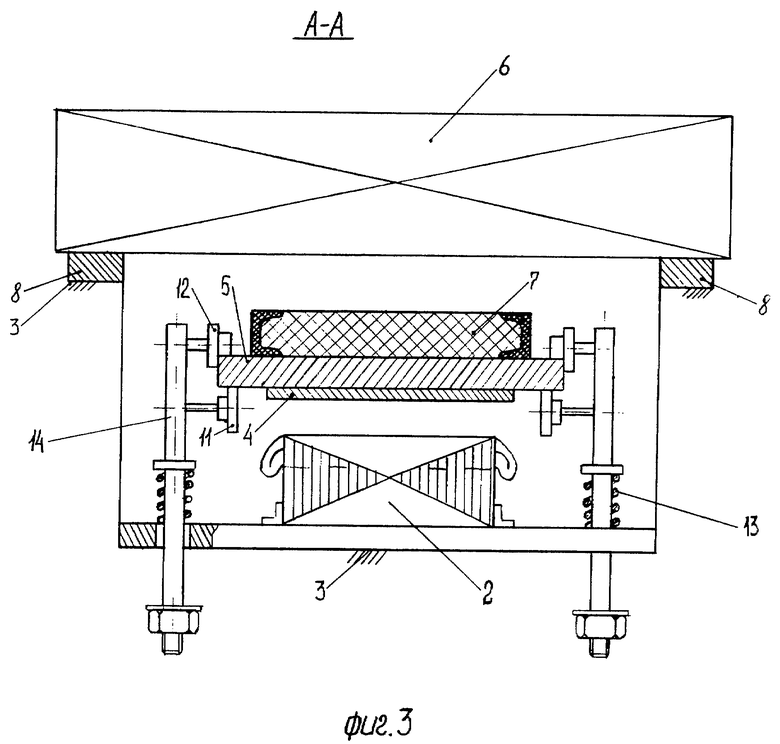
На фиг.1 и на фиг.2 показана кинематическая схема шагающего конвейера с различным положением груза; на фиг.3 сечение А-А на фиг.1.
Шагающий конвейер содержит плоский ЛАД, который состоит из индукторов 2, установленных жестко на основании 3, и ротора, одновременно являющегося жестким транспортирующим элементом 1. Последний состоит из пластин 4, 5 и листа 7 (фиг.3). Пластина 4 выполнена из металла с высокой электропроводимостью (алюминий, медь), пластина 5 - из ферромагнитного металла, а лист 7, прикрепленный к пластине 5 и обращенный к транспортируемому грузу, выполнен из материала с высокими фрикционными свойствами.
Транспортирующий элемент 1 со стороны направления транспортирования и противоположной ей жестко соединен с упругими элементами 9 и 10, закрепленными, в свою очередь, на основании 3 (фиг.1). Ролики 11 и 12, установленные на штангах 14 с упругими элементами 13, располагают транспортирующий элемент 1 параллельно неподвижной раме 8 и индукторам 2. Штанги 14 установлены в отверстиях основания 3 перпендикулярно к транспортирующему элементу. Упругие элементы 13 подбираются такими, чтобы при их сжатии оставался необходимый и минимальный зазор между пластиной 4 и поверхностью индукторов 2 (фиг.3). При свободном состоянии упругих элементов 13 лист 7 транспортирующей поверхностью выступает над транспортирующей поверхностью неподвижной рамы 8. Транспортирующий элемент 1 может ограниченно перемещаться на упругих элементах 13 перпендикулярно, а на роликах 11 и 12 параллельно рабочей поверхности индукторов 2. Индукторы ЛАД подключены к сети переменного тока через блок управления 15. Транспортируемый груз 6 расположен на транспортирующем элементе 1, причем ширина последнего меньше ширины груза 6.
Шагающий конвейер работает следующим образом.
Блок управления 15 подключает индукторы 2 к источнику переменного тока. Индукторы создают бегущее электромагнитное поле, которое прикладывают к пластине 5 транспортирующего элемента 1, в результате чего последний, сжимая упругие элементы 13, притягивается к рабочей поверхности индукторов 2. В результате этого в какой-то момент транспортируемый груз 6 ложится на неподвижную раму 8. Затем бегущее электромагнитное поле, направленное вдоль пластины 4, индуцирует в ней электродвижущую силу и электрический ток. При взаимодействии бегущего электромагнитного поля и электрического тока возникает электромагнитная сила, приводящая транспортирующий элемент 1 в движение на роликах 11 и 12 в направлении бегущего электромагнитного поля, например в сторону упругого элемента 10. При этом упругий элемент 10 сжимается, а элемент 9 растягивается. После отключения блоком управления 15 индукторов 2 от источника переменного тока электромагнитные силы исчезают, потенциальная энергия упругих элементов 13, 10, 9 возвращается транспортирующему элементу. Под действием предварительно сжатых упругих элементов 13 транспортирующий элемент 1 поднимается и поднимает транспортируемый груз 6 над неподвижной рамой 8. Затем под действием упругих элементов 9, 10 на роликах 11, 12 транспортирующий элемент 1 вместе с грузом перемещается в сторону транспортирования, противоположную бегущему электромагнитному полю. В определенный момент индукторы 2 блоком управления 15 снова подключаются к источнику питания. При этом транспортирующий элемент 1 притягивается к индукторам 2. Далее описанный процесс повторяется.
При работе конвейера транспортируемые грузы 6 будут совершать поступательное пошаговое перемещение на транспортирующем элементе 1 вдоль неподвижной рамы 8 в сторону, противоположную направлению движения бегущего магнитного поля индукторов 2. Изменяя направление движения бегущего магнитного поля индукторов 2 изменением порядка чередования их фаз, можно изменять направление перемещения транспортируемых грузов 6.
Частота включений индуктора 2 (fвкл) может быть больше или меньше относительно частоты собственных колебаний системы (fo), определяемой суммарной жесткостью (С) упругих элементов 9, 10 и суммарной массой (М) грузонесущего элемента с транспортируемым материалом 6.

При fвкл=fо конвейер будет работать в режиме резонанса, а следовательно, иметь более высокие энергетические показатели.
Конвейер будет перемещать транспортируемый материал, если длительность включения индукторов tвкл будет удовлетворять условию: 0<tвкл<Т, где Т= 1/fвкл - период частоты колебаний включения индукторов. С увеличением tвкл от минимального до значения, зависящего от упругих элементов 9, 10, величина шага перемещения груза 6 будет увеличиваться. Дальнейшее увеличение tвкл не приведет к росту шага перемещения, так как упругие элементы 9 и 10 имеют ограниченные пределы деформации, но увеличится продолжительность фиксированного положения груза 6 в заданной точке шага. Следовательно, конвейер имеет возможность регулирования продолжительности нахождения грузов в заданных точках перемещения, что может быть нужным в процессе транспортирования.
Для повышенной точности шага перемещения груза устройство может быть оснащено путевыми выключателями, которые могут управлять включением и выключением индукторов 2. Выполнение конвейера с рядом последовательно установленных индукторов, имеющих один общий ротор, позволяет уменьшить металлоемкость грузонесущего органа и всего шагающего конвейера.
Пластина 4 ротора должна быть длиной больше длины индукторов на максимальную величину необходимого шага перемещения груза. Сказанное вызвано законами электромагнитного преобразования энергии в линейном асинхронном двигателе. Станция управления работой ЛАД может быть реализована на основе известных бесконтактных пускателей [3].
Источники информации
1. Спиваковский А. О., Дьячков В.К. Транспортирующие машины. - М.: Машиностроение, 1983.-С.324-326.
2. Авторское свидетельство СССР 507498, МКИ B 65 G 25/06. Способ транспортирования изделия / М.С. Берштейн. 1976-БИ 11.
3. Поскребко А. А. Бесконтактные коммутирующие и регулирующие полупроводниковые устройства на переменном токе. - М.: Энергия, 1978. - 58с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩИЙ КОНВЕЙЕР | 2008 |
|
RU2364564C1 |
| ВИБРАЦИОННЫЙ КОНВЕЙЕР | 2002 |
|
RU2213685C1 |
| СЕПАРАТОР | 2006 |
|
RU2325235C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ВИБРАТОР | 2004 |
|
RU2256514C1 |
| ИНЕРЦИОННЫЙ КОНВЕЙЕР | 2010 |
|
RU2422348C1 |
| ИНЕРЦИОННЫЙ КОНВЕЙЕР | 2013 |
|
RU2523727C1 |
| БУНКЕРНЫЙ ПИТАТЕЛЬ ДЛЯ ВЫДАЧИ ПОРОШКООБРАЗНЫХ МАТЕРИАЛОВ | 2002 |
|
RU2215678C2 |
| Инерционный конвейер | 1989 |
|
SU1666407A1 |
| ЛЕСОПИЛЬНАЯ РАМА | 2000 |
|
RU2198089C2 |
| Инерционный конвейер | 1990 |
|
SU1728095A1 |
Изобретение относится к области промышленного транспорта, а именно к шагающим конвейерам, и может быть использовано для периодического перемещения штучных грузов по отдельным операциям технологического процесса в различных отраслях промышленности. Шагающий конвейер содержит упруго установленный и подвижный в двух плоскостях транспортирующий элемент, расположенный параллельно неподвижной раме, привод транспортирующего элемента. Привод выполнен в виде плоского линейного асинхронного двигателя, индукторы которого жестко закреплены на основании под неподвижной рамой, а единым жестким ротором является транспортирующий элемент. Повышается надежность работы конвейера. 3 ил.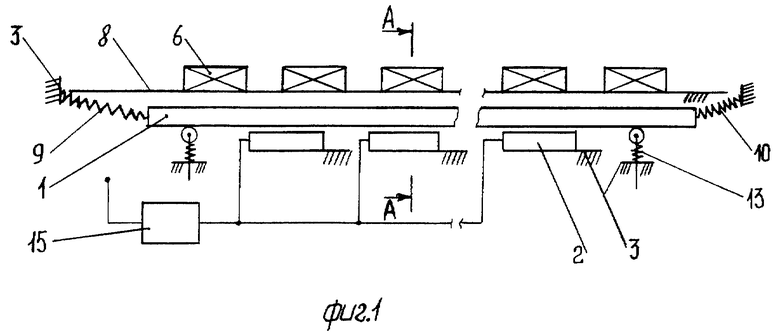
Шагающий конвейер содержит упруго установленный и подвижный в двух плоскостях транспортирующий элемент, расположенный параллельно неподвижной раме, привод транспортирующего элемента, отличающийся тем, что привод выполнен в виде плоского линейного асинхронного двигателя, индукторы которого жестко закреплены на основании под неподвижной рамой, а единым жестким ротором является транспортирующий элемент.
| Способ транспортировки изделия | 1973 |
|
SU507498A1 |
| Конвейер для штучных грузов | 1986 |
|
SU1423470A1 |
| Устройство для перемещения изделий | 1987 |
|
SU1490048A1 |
| Устройство для перекатывания ферромагнитных цилиндрических изделий (его варианты) | 1983 |
|
SU1084199A1 |
| Шаговый конвейер для перемещения цилиндрических ферромагнитных изделий | 1986 |
|
SU1375532A1 |
| КОНВЕЙЕР | 1992 |
|
RU2033956C1 |

