10
00 со
Изобретение относится к подъемно- транспортному машиностроению, а имен- ip к вибрационным конвейерам, исполь- 4уемым для транспорт1фования сыпучих, фтучных и вязких материалов.
; Целью изобретения является повы- иение производительности конвейера при транспортировании влажного материала.
На фиго1 изображен инерционный сонвейер, общий вид, разрез; нафиг.2 го же5 вид сверху; на фиг.З - зависимости скорости движения грузонесуще- :: о лотка и график изменения импульса силы, сообщаемого ему снизу вверх в ;1ависимости от вращения.
Инерционный конвейер имеет основание 1.С роликами 2, лоток 3, выполненный в виде жесткой конструкции из Ферромагнитного материала и установ- JieHHbrii на ролики 2. Приемная воронка установлена в месте поступления
ранспортируемого груза. В этом месте I од грузонесущим лотком :жестко и
лотно к нему прикреплена пластина 5 3 неферромагнитного металла с боль- Лой электропроводностью, например меди, алюминия и других, а на некотором расстоянии параллельно грузонесущему jjioTKy установлен плоский индуктор 6 инейного асинхронного электродвиг.а- еля. Пластина 5 имеет длину, боль- фую, чем индуктор 6. Движение лотка
имеющего выступы 7, ограничивается одной стороны упругим упором 8, а другой стороны - упругим упором 9, i ыполненными в виде пружин сжатия и
тоек. Упоры 8 и 9 закреплены непод- нижно на основании 1. Ролики 2 уста- ювлены подвижно посредством пружин Си 11 на основании. Индуктор б под- :лючается к сети трехфазного переменного тока через блок 1;2 управления, рлок управления может быть вьшолнен основе схемы тиристорного пуска- типа ПТ 5, дополнительно снаб- з енного генератором низкой частоты с Регулируемой скважностью. На упорах 1 и 9 установлены датчики 13 и 14 пефемещения лотка которые срабатывают фт взаимодействия с выступом 7 и:сое динены с блоком 12 управления, Высту- иы 15 предотвращают соприкосновение индуктора 6 с пластиной 5..Индуктор 1& имеет возможность поворота в гори- :{ онтальной плоскости, параллельной Носкости транспортирования, при по- ощи механического, пневматического
или гидравлического механизма 16. Длина индуктора 6 и ширина грузоне- сущего лотка 3 с пластиной 5 связаны между собой соотношением
0
5
0
5
0 5 п е
+ Ь2 ; где Н - ширина лотка 3;
1 - длина индуктора 6; b - ширина индуктора б, ; Инерционный конвейер работает сле- рующим образом.
Блок 12 управления подключает индуктор б к сети. Индуктор создает бегущее магнитное поле, перемещающееся в направлении продольной оси индуктора б. Это магнитное поле индуцирует в проводящей пластине 5 электрический ток, взаимодействие которого с бегущим магнитным полем индуктора приводит к созданию электромагнитного усилия F. Это усилие может быть представлено в. общем случае в виде суммы двух составляющих, одна из которых F направлена вдоль продольной оси лотка 3, а другая FU перпендикулярна ей и лежит в плоскости, параллельной плоскости транспортирования. Составляющая усилия F, направленная вдоль продольной оси лотка 3, создает тяговое усилие, приводящее лоток 3 в движение на роликах 2, Составляющая усилия FU, направленная перпендикулярно F, сйсимает через подвижный относительно .своей оси ролик 2 пружину 11 в направлении действия силы FU.- Два противололожных относительно лот ка 3 ролика 2 и пружины 11 могут быть установлены на основании 1 на одной оси. Жесткость пружины 11 устанавливается применительно к массе конкретного конвейера и определяется требуемой амплитудой колебаний. Одновременно ферромагнитный лоток 3 с пластиной 5 притягивается к индуктору б с силой F и под действием индуцируемых токов нагревается до требуемой температуры. Под действием силы притяжения F лоток 3 через ролики 2 сожмет пружину 10 и уменьшит воздушный зазор между пластиной 5 и индуктором 6. Жесткость пружины 10 устанавливается применительно к конкретному конвейеру исходя из того, что при поступлении груза на-лоток 3, они дополнительно сожмутся, величина сжатия пружины 10 и уменьшение воздушного зазора между индукторо,м б и пластиной 5 при этом будут пропорциональны массе транспортируемого груза. Направление движе314
ния лотка 3 определяется порядком включения фаз напряжения, подводимого к индуктору 6, например, в сторону упора 8. Механическая характеристика линейного асинхронного двигателя за счет выбора параметров индуктора 6, пластины 5 и лотка 3 должна быть такой, чтобы скорость лотка 3 при с/ О (фиг.2) и F F увеличивалась линей- но во времени с определенньм постоянным ускорением, определяемым максимальным коэффициентом трения f, транспортируемого груза о грузонесущий лоток 3. В момент достижения лотком
наибольшей скорости V.. выступ 7 взаиМ
модействует с датчиком 14 на упоре 8. Датчик срабатывает, при этом блок 12 управления кратковременно отключает
индуктор 6 от сети. Силы F
и F уМень
шаются до нуля, при этом пружины 11 и 10 разжимаются, лоток 3 получает импульсные воздействия в поперечном направлении в плоскости транспортирования и снизу вверх Амплитуда импульса F определяется инерционно жесткостными свойствами системы и устанавливается применительно к конкретному конвейеру„ Импульс -силы F., в момент достижения лотком 3 наиболь- шей скорости Vf в направлении упругого упора 8 прижимает груз к несущей поверхности и в пределе сообщает грузу скорость, равную скорости лотка 3, затем подкидывает груз, так как блок 12 управления включает индуктор 6 с, обратным порядком чередования фаз питания, лоток 3 прижимается к индуктоу бис силой -Fjj помогает действию пружины упругого упора 8. Затем блок 40 соотношения 12.управления кратковременно отключает индуктор 6 от сети, затем включает без изменения порядка чередования фаз, такой периодический процесс вклюДиаграммгрузонесуще транспортиро rpaNfMy движ инерционног ным коэффици коэффициент на оптималь щих способн с изменением нально и сил несущий лот тигается по тора 6 линей теля с помощ перпендикул тирования н
Возможно составляющей уменьшения н
V Ю 15
20
25
30 35
40 соотношения возрастающеи скоростью, дальнейшая работа устройства повторяется согласно описанному. Транспортируем лй груз с момента достижения лотком 3 скорости V по инерции продвигается по лотку 3, так как ускорение грузонесущего лотка резко меняет знак. Одновременно с этим за счет дополнительных колебаний грузонесущего лотка в трех взаимно перпендикулярных направлениях X, Y, Z, определяемых колебанием F , Fj и F, уменьшается сила трения перемещаемого груза относительно грузонесущего лотка, что позволяет значительно повысить эффективность транспортирования .
При транспортировании груза в обратную сторону лоток взаимодействует с упором 9 и датчиком 13. В остальном работа конвейера соответствует описанному.
Диаграмма скоростей V(t) колебаний грузонесущего лотка 3 в плоскости транспортирования представляет тахо- rpaNfMy движения грузонесуще.го лотка инерционного конвейера с определенным коэффициентом f. При изменении коэффициента трення для поддержания на оптимальном уровне транспортирующих способностей конвейера необходимо с изменением f. изменять пропорционально и силу F, приводящую грузонесущий лоток 3 в движение, что достигается посредством поворота индуктора 6 линейного асинхронного двигателя с помощью системы 16 вокруг оси, перпендикулярной плоскости транспортирования на уголо, определяемый из
F F.sino6 (фиг.2).
соотношения
Возможность изменения продольной составляющей возмущающего усилия без уменьшения нагрева грузонесущего лот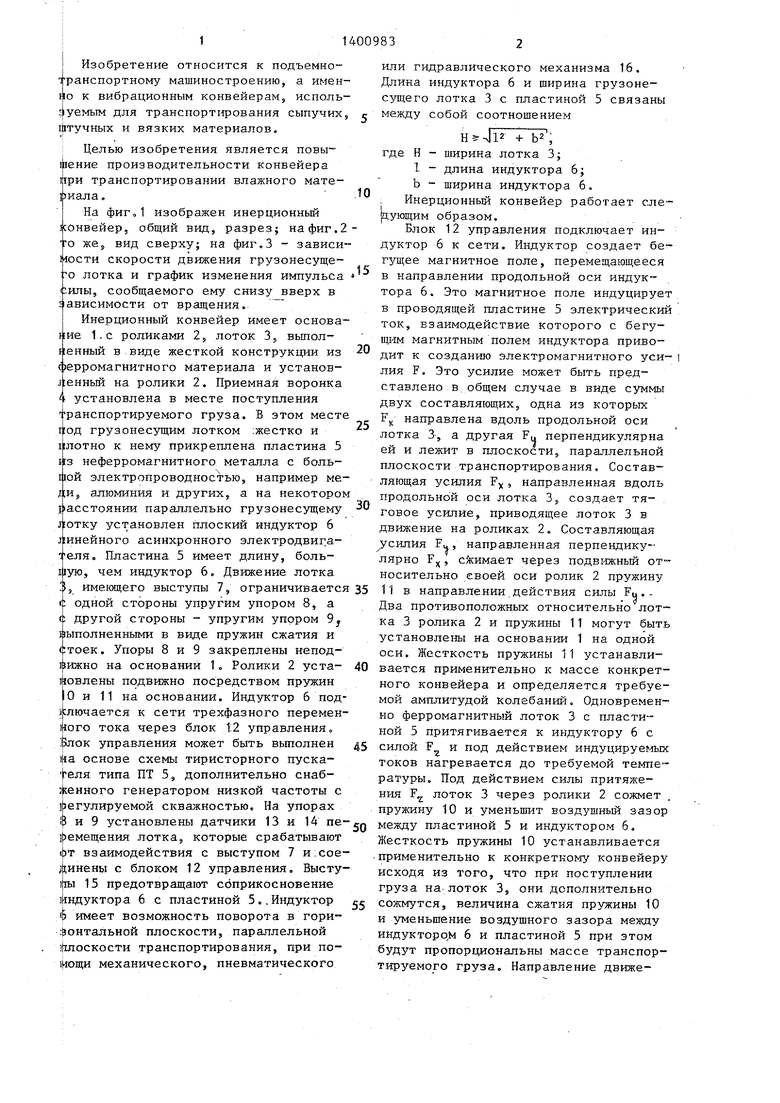
| название | год | авторы | номер документа |
|---|---|---|---|
| Инерционный конвейер | 1985 |
|
SU1265111A1 |
| ИНЕРЦИОННЫЙ КОНВЕЙЕР | 2010 |
|
RU2422348C1 |
| Инерционный конвейер | 1989 |
|
SU1666407A1 |
| Инерционный конвейер | 1990 |
|
SU1728095A1 |
| ИНЕРЦИОННЫЙ КОНВЕЙЕР | 2013 |
|
RU2523727C1 |
| Вибрационный конвейер | 1986 |
|
SU1630999A1 |
| Промежуточный электромагнитный привод наклонного ленточного конвейера | 1982 |
|
SU1033390A1 |
| Способ транспортирования грузов многосекционным вибрационным конвейером | 1989 |
|
SU1722986A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР | 2000 |
|
RU2193515C2 |
| ВИБРАЦИОННЫЙ КОНВЕЙЕР | 2002 |
|
RU2213685C1 |
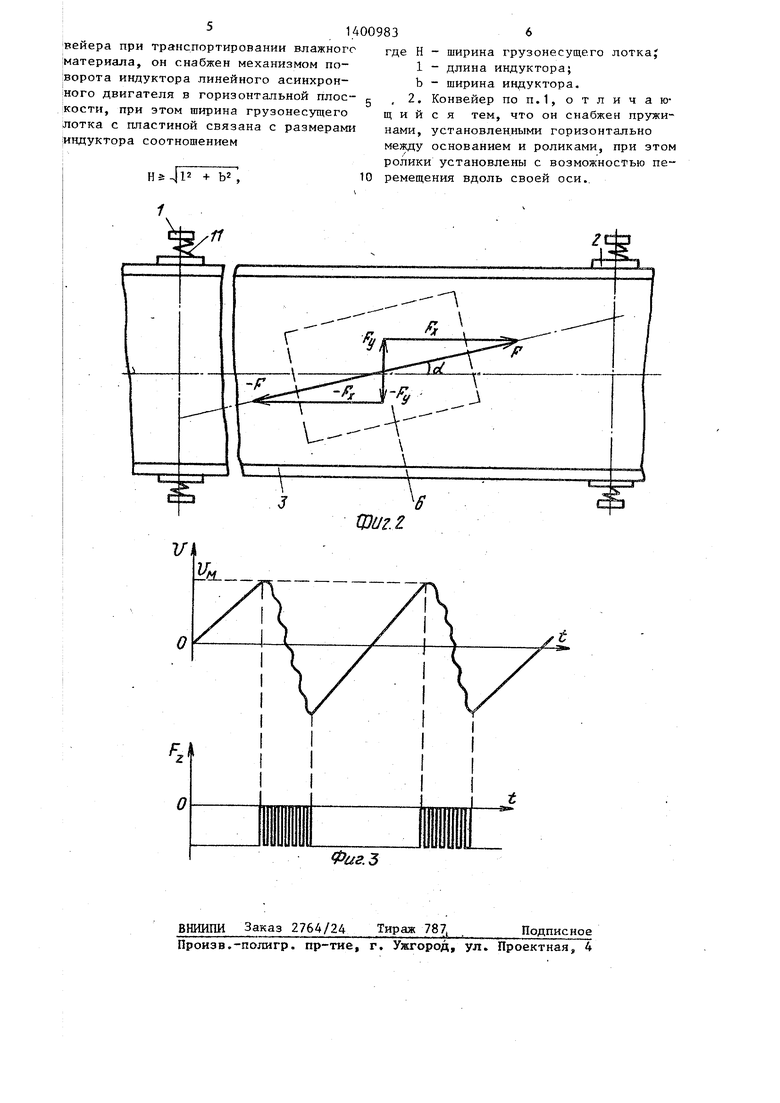
Изобретение относится к подъемно-транспортному машиностроению. Цель - повышение производительности конвейера при транспортировании влажного материала. Конвейер включает ос нование 1 и ролики 2, на которых установлен грузонесущий лоток (Л) 3 с пластиной 5 из неферромагни тного материала и упорами 8 и 9, На основании при помощи механизма 16 поворота закреплен индуктор (И) 6 линейного асинхронного электродвигателя с блоком 12 управления. Ширина Л 3 с плас- тиной 5 связана с размерами И 6 соотношением Н % л + Ь , где Н - ширина Л 3; 1 - длина И 6 b - ширина И 6. Между основанием 1 и роликами 2, установленными с возможностью перемещения вдоль своей оси, горизонтально установлены пружины 10. Блок 12 подключает И 6, который создает бегущее магнитное поле, индуцируя в пластине 5 электрический ток. При взаимодействии последнего с магнитным полем создается электромагнитное усилие F. Составляющая сила F создает тяговое усилие, приводящее Л 3 в движение, а FU сжимает пружину. Одновременно Л 3 притягивается к И 6 с силой F, При достижении Л 3 наибольшей скорости блок 12 отключает И 6, Транспортируемый груз по инерции продвигается по Л 3, т,к, ускорение Л 3 резко меняет знак за счет переключения фаз И 6 блоком 12, Одновременно за счет дополнительных колебаний Л 3, происходящих из-за периодических включений и отключений И 6 без переключения фаз, уменьшается сила трения перемещаемого груза относительно Л 3. 1 з,п. ф-лы, 3 ил. 
чения и отключения индуктора 6 блоком 45 ка позволяет повысить удельную производительность конвейера при транспортировании влажных материалов.
Формула изобретения
50
WutZ
Фаг.
ВНИИПИ Заказ 2764/24 Тираж 787,
Произв.-полигр, пр-тие, г. Ужгород, ул. Проектная, 4
t
Подписное
| 1970 |
|
SU411011A1 | |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Инерционный конвейер | 1985 |
|
SU1265111A1 |
