Изобретение относится к устройствам наведения по азимуту и углу места объектов, в том числе объектов вооружения автоматизированных зенитно-ракетных комплексов (ЗРК) и противотанковых ракетных комплексов (ПТРК). Кроме военной техники, предлагаемое устройство может быть использовано в следующих устройствах: автоматизированных установках тушения пожаров для наведения средств пожаротушения, установках для автоматической видео-. фотосъемки и других комплексах, требующих мобильной отработки координат азимута и угла места.
Известно подъемно-поворотное устройство с системой управления (далее по тексту ППУ) комплекса "ASRAD" (http://www/army-technology. com/contractors/missiles/bofors_ missiles/index. html, http://www/army-technology. com/projects/leflasys/index. html), включающее электродвигатель, шестеренную передачу, рабочий орган с нагрузкой, датчик угла, устройство сравнения главной обратной связи и устройство управления электродвигателем. В этом устройстве ось вращения рабочего органа в вертикальной плоскости практически совпадает с центром масс подвижных частей ППУ, что является достоинством этого ППУ, однако это достигнуто за счет подъема всей конструкции над корпусом машины и, как следствие, увеличением общей высоты комплекса, что является демаскирующим фактором. Кроме того, система указания цели (антенна локатора кругового обзора) для исключения ее затенения частями конструкции ППУ, в свою очередь, поднята над ППУ, что значительно усугубляет указанный выше демаскирующий фактор. В условиях современного боя эти особенности аналога являются его существенными недостатками.
Наиболее близким по совокупности существенных признаков к изобретению является ППУ комплекса "Панцирь-2" (Каталог "Оружие России 2000", стр. 599-602, издательство "Военный Парад", Москва, 2000 г., Каталог "Оружие России", т. 7 "Высокоточное оружие и боеприпасы", стр. 277, издательство "Военный Парад", Москва), принимаемое за прототип. ППУ комплекса "Панцирь-2" содержит азимутальную платформу, корпус привода, электродвигатель, заключенную в корпус редуктора шестеренную передачу поворота рабочего органа, датчик угла поворота рабочего органа, рабочий орган с нагрузкой, устройство сравнения главной обратной связи и устройство управления электродвигателем. По задающему сигналу, поступающему в устройство сравнения главной обратной связи, привод угла места пусковой установки разворачивает ППУ на соответствующий угол в вертикальной плоскости (плоскости угла места), измеряемый датчиком угла. При этом сигнал с датчика угла непрерывно сравнивается с задающим сигналом, и по их разности устройство сравнения вырабатывает сигнал, поступающий на устройство управления электродвигателем. В ППУ прототипа присутствуют значительные моменты неуравновешенности инерционных масс за счет того, что ось вращения рабочего органа в вертикальной плоскости не совпадает с центром масс подвижных частей. Это приводит к увеличению потребной мощности силового привода, ухудшению качества переходных процессов и появлению дополнительных ошибок наведения. Таким образом, прототип не обеспечивает желаемой точности и быстродействия, что является его недостатком. Прототипу также присущ недостаток, указанный для предыдущего аналога.
Изобретение направлено на решение задачи улучшения тактико-технических параметров современных систем вооружения, в частности ЗРК и ПТРК, а также потребительских качеств гражданской техники, предназначенной для мобильной отработки рабочим органом координат азимута и угла места.
При использовании изобретения достигаются следующие технические результаты:
1. Уменьшается энергопотребление привода угла места.
2. Повышается точность и скорость отработки рабочим органом координаты угла места.
3. Уменьшается высота ППУ и, следовательно, высота всего комплекса.
4. Исключается затенение устройства целеуказания в режиме кругового обзора.
Указанные технические результаты достигаются тем, что подъемно-поворотное устройство с системой управления содержит следующее: азимутальную платформу, электродвигатель, устройство управления электродвигателем, рабочий орган, шестеренную передачу поворота рабочего органа, заключенную в корпус редуктора, датчик угла поворота рабочего органа, устройство сравнения главной обратной связи, электрически соединенное своим выходом с устройством управления электродвигателем. ППУ дополнительно снабжено дифференциальной шестеренной передачей и шестеренной передачей поворота корпуса редуктора, датчиком поворота корпуса редуктора и двумя стопорящими устройствами. Все три шестеренные передачи вместе со стопорящими устройствами заключены в корпус редуктора, выполненный в форме балки, на котором установлены электродвигатель, датчик угла поворота рабочего органа и датчик поворота корпуса редуктора, которые вместе с редуктором образуют единый конструкционный модуль, выполненный с возможностью поворота в вертикальной плоскости относительно азимутальной платформы, при этом выходной вал электродвигателя механически связан с входным валом дифференциальной шестеренной передачи. Первый выходной вал этой передачи связан с входным валом шестеренной передачи поворота корпуса редуктора, снабженной стопорящим устройством любого ее вала. выходной вал которой механически связан с азимутальной платформой и с измерительным валом датчика поворота корпуса редуктора. Второй выходной вал дифференциальной шестеренной передачи связан с входным валом шестеренной передачи поворота рабочего органа, снабженной стопорящим устройством любого ее вала, выходной вал которой механически связан с рабочим органом и с измерительным валом датчика поворота рабочего органа. Кроме того, подъемно-поворотное устройство с системой управления дополнительно снабжено устройством сравнения, задающим устройством, коммутатором сигналов датчиков, коммутатором стопорящих устройств и сумматором. Устройство сравнения одним из своих входов электрически связано с выходом датчика угла подъема корпуса редуктора, а вторым входом связано с задающим устройством. Выход устройства сравнения подключен к управляющему входу коммутатора стопорящих устройств. Первый вход сумматора электрически связан с выходом датчика угла подъема корпуса редуктора, а второй вход электрически связан с выходом датчика угла поворота рабочего органа. Выход сумматора подключен к сигнальному входу коммутатора сигналов датчиков. Вход управления коммутатора сигналов датчиков связан с аппаратурой комплекса, вырабатывающей стартовый сигнал. Выход коммутатора сигналов датчиков соединен с входом устройства сравнения главной обратной связи. Первый выход коммутатора стопорящих устройств электрически соединен с управляющим входом стопорящего устройства шестеренной передачи поворота корпуса редуктора, а второй выход коммутатора стопорящих устройств электрически соединен с управляющим входом стопорящего устройства шестеренной передачи поворота рабочего органа.
Указанные выше технические результаты подъемно-поворотного устройства достигаются следующим образом:
1. Корпус редуктора выполняет функцию балки, приводимой в движение установленным на ней электродвигателем, поэтому поворот подвижных частей ППУ производится вокруг оси, максимально приближенной к центру масс системы, чем обеспечивается уравновешенность подвижных частей относительно оси вращения и минимальный момент инерции системы относительно этой оси. Уравновешенная нагрузка при заданных ускорениях и массе подвижных частей энергетически более выгодна и требует меньшей мощности электродвигателя, благодаря чему уменьшается энергопотребление.
2. Уравновешенная нагрузка при заданной массе подвижных частей обеспечивает лучшее качество переходных процессов, кроме того, поворот корпуса редуктора производится на форсированном режиме электродвигателя с последующим гашением движения посредством стопорящего устройства, что исключает затягивание переходных процессов, свойственное форсированным режимам, чем и обеспечивается увеличение точности и скорости отработки рабочим органом с нагрузкой координаты угла места.
3. Быстродействие ППУ позволяет отрабатывать целеуказание со стартом из сложенного положения, чем уменьшается высота комплекса и улучшается его маскировка.
4. Быстродействие ППУ позволяет отрабатывать целеуказание со стартом из сложенного положения, чем исключается затенение устройства целеуказания в режиме кругового обзора.
Ниже представлено подробное описание предлагаемого ППУ со ссылками на чертежи, на которых:
На фиг.1 изображена функциональная схема ППУ.
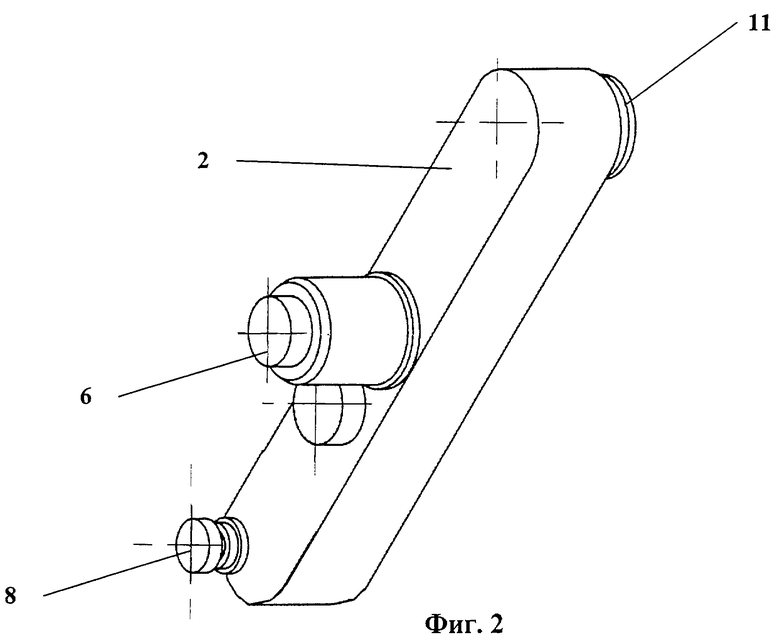
На фиг. 2 изображен внешний вид единого конструкционного модуля, включающего: корпус редуктора, выполненный в форме балки и содержащий три шестеренных передачи, две из которых снабжены стопорящими устройствами и имеют выходящие из корпуса валы; фланцевый электродвигатель и два датчика угла поворота.
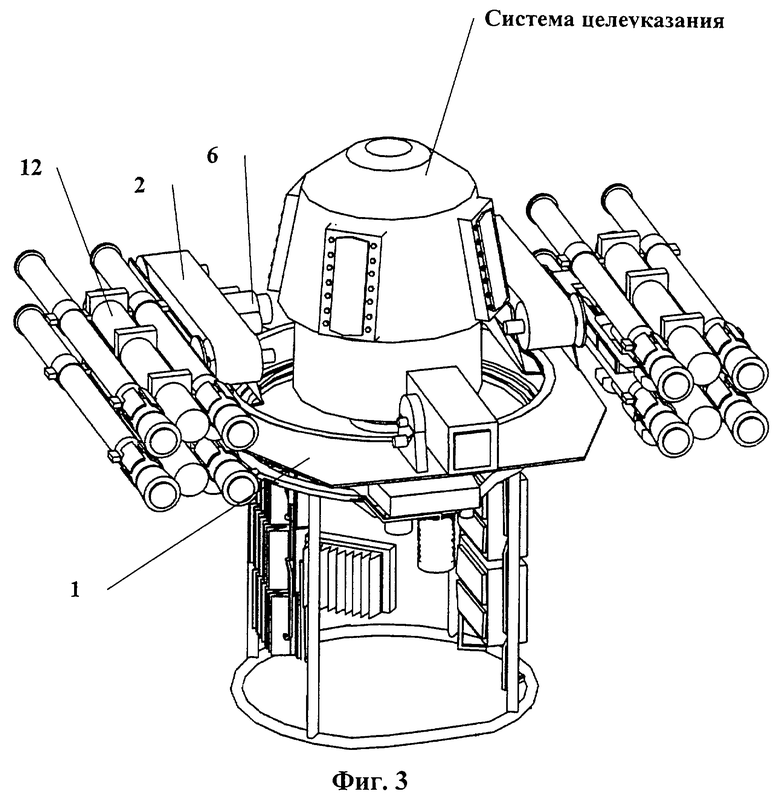
На фиг.3 схематически изображен внешний вид ППУ в сложенном положении.
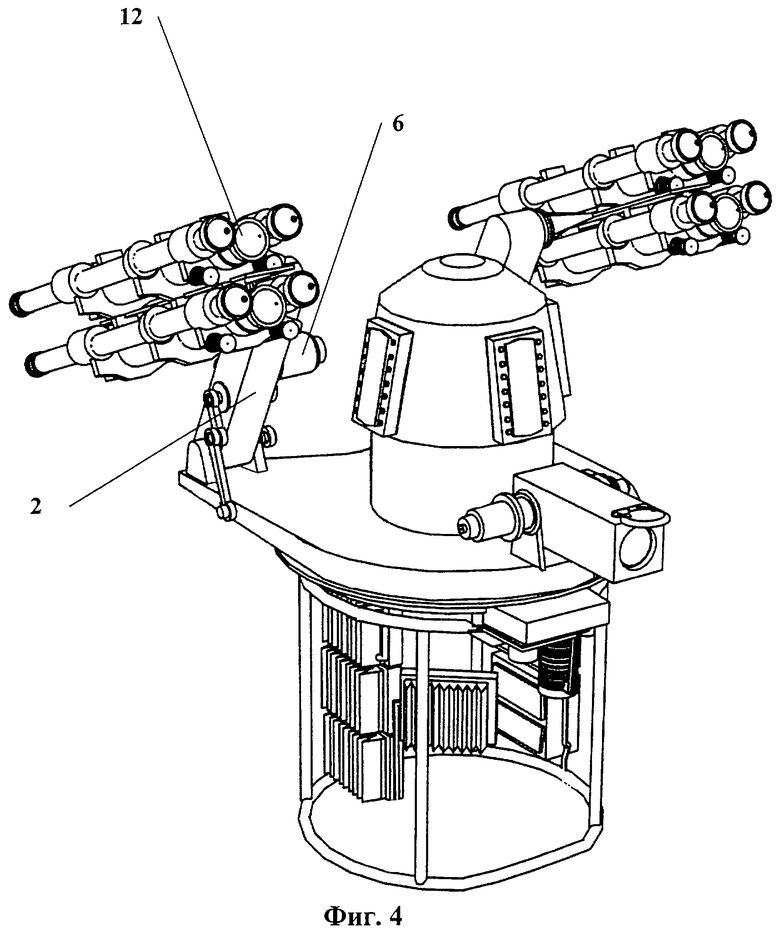
На фиг.4 схематически изображен внешний вид ППУ в рабочем положении.
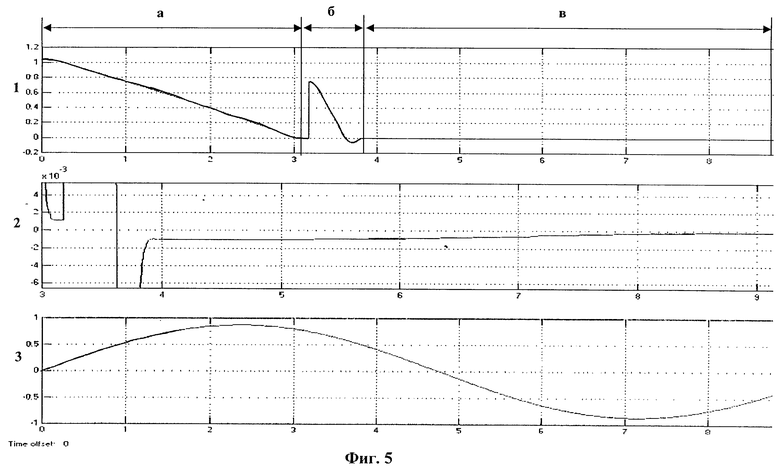
На фиг.5 изображены осциллограммы, полученные в ходе испытания ППУ.
Подъемно-поворотное устройство с системой управления схематично изображено на фиг.1 и состоит из следующих элементов: азимутальной платформы 1; корпуса редуктора 2, выполненного в форме балки (фиг.2) и являющегося корпусом для трех механических шестеренных передач 3, 4, 5. Фланцевый электродвигатель 6 установлен на корпусе редуктора 2 и присоединен своим валом к входному валу дифференциальной шестеренной передачи 4. Первый выходной вал этой передачи внутри корпуса редуктора 2 кинематически соединен с входным валом шестеренной передачи 3 поворота корпуса редуктора, которая снабжена стопорящим устройством 7. Выходной вал 8 шестеренной передачи 3 поворота корпуса редуктора выходит из корпуса редуктора 2 наружу, укреплен на азимутальной платформе 1 и связан с измерительным валом датчика 9 угла поворота корпуса редуктора. Корпус этого датчика укреплен на корпусе редуктора 2. Второй выходной вал дифференциальной шестеренной передачи 4 внутри корпуса редуктора 2 кинематически соединен с входным валом шестеренной передачи 5 поворота рабочего органа, которая снабжена стопорящим устройством 10. Выходной вал 11 шестеренной передачи 5 поворота рабочего органа присоединен к рабочему органу и связан с измерительным валом датчика 13 угла поворота рабочего органа. Корпус этого датчика укреплен на корпусе редуктора 2. Выход датчика 9 угла поворота корпуса редуктора электрически соединен с одним из входов устройства сравнения 14, другой вход устройства сравнения 14 соединен с задающим устройством 15 угла подъема корпуса редуктора. Кроме того, выход датчика 9 угла поворота корпуса редуктора соединен с одним из входов двухвходового сумматора 16. Выход датчика 13 угла поворота рабочего органа электрически соединен со вторым входом сумматора 16. Выход устройства сравнения 14 электрически соединен с управляющим входом коммутатора 17 стопорящих устройств, а выход сумматора 16 соединен с сигнальным входом коммутатора 18 сигналов датчиков. Управляющий вход коммутатора 18 сигналов датчиков подключен к аппаратуре комплекса, вырабатывающей стартовый сигнал (на фиг.1 не показана). Первый выход коммутатора 17 стопорящих устройств электрически подключен к управляющему входу стопорящего устройства 7 шестеренной передачи 3 поворота корпуса редуктора. Второй выход коммутатора 17 стопорящих устройств подключен к управляющему входу стопорящего устройства 10 шестеренной передачи 5 поворота рабочего органа. Выход коммутатора 18 сигналов датчика подключен к входу главной обратной связи устройства сравнения главной обратной связи 19. Управляющий вход устройства сравнения главной обратной связи 19 подключен к аппаратуре комплекса, вырабатывающей сигнал целеуказания (на фиг.1 не показана). Выход устройства сравнения главной обратной связи 19 электрически подключен к входу устройства управления 20 электродвигателем, выход которого подключен к управляющему входу электродвигателя 6 (на фиг.1 не показано).
ППУ работает следующим образом. В исходном положении корпус редуктора 2 опущен. Угол этого корпуса относительно азимутальной платформы 1 и угол, который образует рабочий орган с нагрузкой относительно этого корпуса, равны нулю. Высота комплекса минимальна, устройство целеуказания функционирует в режиме кругового обзора, конструкция ППУ его не затеняет, что является одним из заявленных технических результатов. Цепь главной обратной связи разомкнута коммутатором 18 сигналов датчиков, задающий сигнал угла места цели на входе устройства сравнения главной обратной связи 19 отсутствует, электродвигатель 6 обесточен. Шестеренная передача 5 поворота рабочего органа застопорена стопорящим устройством 10 по сигналу коммутатора 17 стопорящих устройств, а шестеренная передача 3 поворота корпуса редуктора расстопорена стопорящим устройством 7 по инверсному сигналу коммутатора 17 стопорящих устройств. От аппаратуры комплекса, в состав которого входит ППУ, поступает сигнал "Старт" на вход управления коммутаторов 18 сигналов датчиков и одновременно задающий сигнал угла места цели поступает на управляющий вход устройства сравнения главной обратной связи 19. При этом коммутатор 18 сигналов датчиков подключает на вход устройства сравнения главной обратной связи 19 суммарный сигнал датчиков 9 и 13, поступающий на этот вход с выхода сумматора 16. Устройство сравнения главной обратной связи 19 сравнивает этот сигнал с задающим сигналом угла места и своим выходом инициирует устройство управления 20 электродвигателем. Устройство управления 20 электродвигателем вырабатывает сигнал управления и электродвигатель 6 через дифференциальную шестеренную передачу 4 и расстопоренную шестеренную передачу 3 поворота корпуса редуктора поворачивает корпус редуктора 2 с установленными на нем элементами относительно азимутальной платформы 1 до тех пор, пока угол подъема не станет равным установленному значению (сигналу задающего устройства 15, определяющего максимальный угол поворота корпуса редуктора), что определяется устройством сравнения 14. В этот момент устройство сравнения 14 срабатывает, переключая коммутатор 17 стопорящих устройств. Коммутатор 17 стопорящих устройств включает стопорящее устройство 7, застопоривающее шестеренную передачу 3 поворота корпуса редуктора, и одновременно отключает стопорящее устройство 10 шестеренной передачи 5 поворота рабочего органа. При этом корпус редуктора 2 уже поднят на рабочий угол, соответствующий установленному значению, и застопорен. Поскольку целеуказание к этому моменту уже произведено, то устройство целеуказания перестает работать в режиме кругового обзора и его частичное затенение частями конструкции ППУ уже не имеет существенного значения для эффективной работы комплекса. Далее угол места отрабатывается за счет поворота рабочего органа 12 с нагрузкой относительно корпуса редуктора 2, причем ось поворота рабочего органа с нагрузкой практически совпадает с их общим центром масс, что и обеспечивает прочие заявленные технические результаты, а именно малое энергопотребление привода угла места, а также повышение точности и скорости отработки рабочим органом координаты угла места. Следует отметить, что скорость и точность отработки координаты угла места возрастает еще по той причине, что поворот корпуса редуктора производится на форсированном режиме электродвигателя с последующим гашением движения посредством стопорящего устройства 7, что исключает затягивание переходных процессов, свойственное форсированным режимам. Как видно из осциллограмм (фиг.5), время подъема корпуса редуктора не превышает 3 сек, а максимальная ошибка слежения рабочего органа с нагрузкой при отработке синусоидального задающего сигнала, соответствующего амплитуде углового возмущения 60 град и частоте 0,66 Гц, не превышает 2,0 мрад.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАЗЕМНЫЙ КОМПЛЕКС РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ "АВТОБАЗА-М" | 2015 |
|
RU2615992C1 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО | 2015 |
|
RU2601824C1 |
| Опорно-поворотное устройство | 2016 |
|
RU2614085C1 |
| НАЗЕМНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ | 2013 |
|
RU2530185C1 |
| ПРОКАТНАЯ КЛЕТЬ С КОНСОЛЬНЫМИ ВАЛКАМИ | 1999 |
|
RU2189874C2 |
| Универсальная роботизированная платформа | 2016 |
|
RU2639009C1 |
| БОЕВОЙ РОБОТИЗИРОВАННЫЙ МОДУЛЬ | 2013 |
|
RU2531630C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО | 2014 |
|
RU2563706C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ЦЕЛИ МОБИЛЬНОЙ РЛС | 2008 |
|
RU2410711C2 |
Изобретение относится к устройствам наведения по азимуту и углу места объектов, в том числе объектов вооружения автоматизированных зенитно-ракетных (ЗРК) и противотанковых (ПТРК) комплексов. Кроме военной техники предлагаемое устройство может быть использовано в автоматизированных установках для тушения пожаров, для наведения средств пожаротушения, установках для автоматической видео-, фотосъемки и других комплексах, требующих мобильной отработки координат азимута и угла места. Сущность изобретения: большая часть электропривода подъемно-поворотного устройства смонтирована в едином корпусе, выполняющем одновременно функции редуктора и поворотной балки с укрепленным на ее конце рабочим нагруженным органом. Техническим результатом изобретения является осуществление старта устройства из исходного положения на форсированном режиме, точной отработки угла места при высоких динамических показателях при уменьшении энергопотребления привода и уменьшении высоты всего комплекса. 5 ил.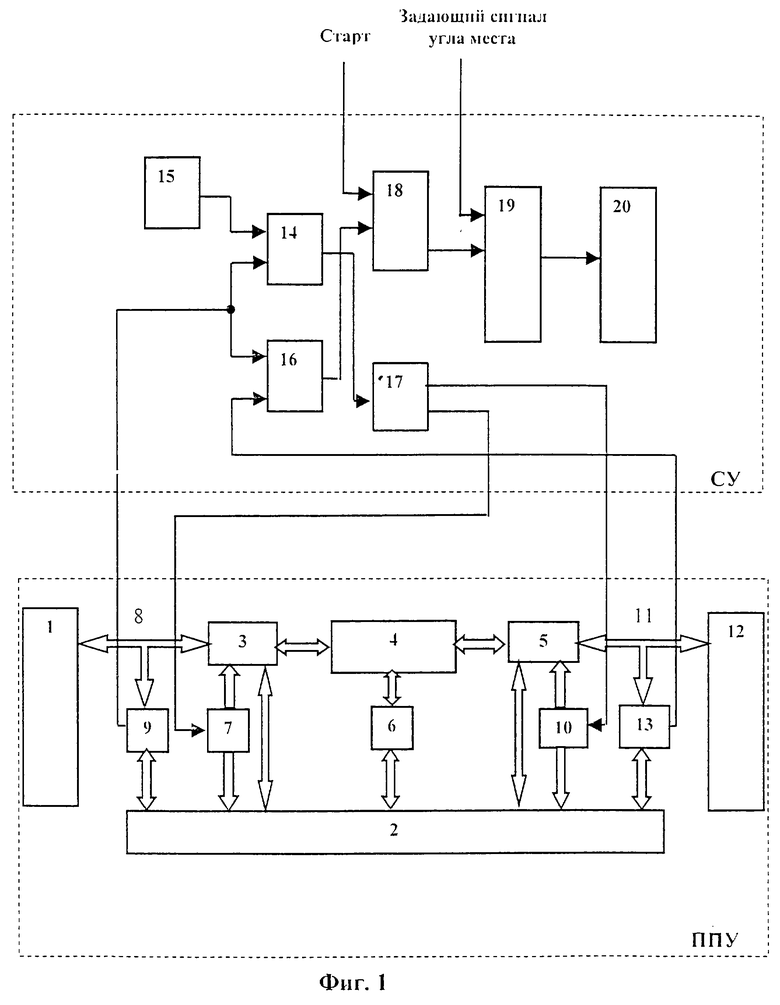
Подъемно-поворотное устройство с системой управления, содержащее азимутальную платформу, электродвигатель, устройство управления электродвигателем, шестеренную передачу поворота рабочего органа, заключенную в корпус редуктора, датчик угла поворота рабочего органа, рабочий орган, устройство сравнения главной обратной связи, электрически соединенное своим выходом с устройством управления электродвигателем, отличающееся тем, что оно содержит дифференциальную шестеренную передачу и шестеренную передачу поворота корпуса редуктора, датчик поворота корпуса редуктора, два стопорящих устройства, причем все три шестеренные передачи в совокупности со стопорящими устройствами заключены в корпус редуктора, выполненный в форме балки, на котором установлены электродвигатель, датчик угла поворота рабочего органа, датчик поворота корпуса редуктора, и образуют с ним единый конструкционный модуль, выполненный с возможностью поворота в вертикальной плоскости относительно азимутальной платформы, при этом выходной вал электродвигателя механически связан с входным валом дифференциальной шестеренной передачи, первый выходной вал этой передачи связан с входным валом шестеренной передачи поворота корпуса редуктора, снабженной стопорящим устройством любого ее вала, выходной вал которой механически связан с азимутальной платформой и с измерительным валом датчика поворота корпуса редуктора, второй выходной вал дифференциальной шестеренной передачи связан с входным валом шестеренной передачи поворота рабочего органа, снабженной стопорящим устройством любого ее вала, выходной вал которой механически связан с рабочим органом и с измерительным валом датчика поворота рабочего органа, кроме того, подъемно-поворотное устройство с системой управления содержит устройство сравнения, задающее устройство, коммутатор сигналов датчиков, коммутатор стопорящих устройств и сумматор, причем устройство сравнения одним из своих входов электрически связано с выходом датчика угла подъема корпуса редуктора, а вторым - с задающим устройством, выход устройства сравнения подключен к управляющему входу коммутатора стопорящих устройств, первый вход сумматора электрически связан с выходом датчика угла подъема корпуса редуктора, а второй вход электрически связан с выходом датчика угла поворота рабочего органа, выход сумматора подключен к сигнальному входу коммутатора сигналов датчиков, вход управления этого коммутатора связан с аппаратурой комплекса, вырабатывающей стартовый сигнал, выход коммутатора сигналов датчиков соединен с входом устройства сравнения главной обратной связи, первый выход коммутатора стопорящих устройств электрически соединен с управляющим входом стопорящего устройства шестеренной передачи поворота корпуса редуктора, а второй выход коммутатора стопорящих устройств электрически соединен с управляющим входом стопорящего устройства шестеренной передачи поворота рабочего органа.
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |
| Каталог | |||
| - М.: "Военный парад", 2000; Оружие России | |||
| Высокоточное оружие и боеприпасы | |||
| Каталог | |||
| - М.: "Военный парад", 2000 | |||
| ПОДЪЕМНЫЙ МЕХАНИЗМ ОРУЖИЯ БАШЕННОЙ УСТАНОВКИ | 1992 |
|
RU2094739C1 |
| ДВУХПЛОСКОСТНАЯ СИСТЕМА СТАБИЛИЗАЦИИ И НАВЕДЕНИЯ | 1999 |
|
RU2150072C1 |
| US 3854378, 17.12.1974 | |||
| FR 2073090, 24.09.1971 | |||
| DE 19951915 А1, 10.05.2001 | |||
| Сверло для трепанации костей черепа | 1957 |
|
SU111192A1 |
