Изобретение относится к многоковшовому цепному экскаватору с направляемыми на цепи ковшами для применения в установках для открытых горных разработок, причем цепь является приводимой в действие посредством привода, приданного многоковшовому цепному экскаватору, а также к способу для регулирования привода многоковшового цепного экскаватора.
Известен многоковшовый цепной экскаватор с направляемыми на цепи ковшами для применения в установках для открытых горных разработок, причем цепь является приводимой в действие посредством приданного многоковшовому цепному экскаватору привода [1].
Вследствие крайне высоких капиталовложений для многоковшовых цепных экскаваторов продолжительности их простоя являются особенно критической величиной. Задачей изобретения является поэтому создание многоковшового цепного экскаватора с меньшим износом и тем самым с меньшими продолжительностями простоя, чем это имеет место в известных многоковшовых цепных экскаваторах. Далее задачей изобретения является указание способа эксплуатации многоковшового цепного экскаватора, который уменьшает износ.
Задача решается согласно изобретению за счет многоковшового цепного экскаватора для применения в установках для открытых горных разработок согласно пункту 1 формулы изобретения, а также за счет способа согласно пункту 5 формулы изобретения. При этом многоковшовый цепной экскаватор содержит направляемые на цепи ковши, причем цепь приводится в действие или соответственно является приводимой в действие посредством привода, приданного многоковшовому цепному экскаватору. Скорость цепи измеряют бесконтактным методом. Кроме того, в частности, предусмотрено регулировать этот привод в зависимости от измеряемых величин, которые получают за счет бесконтактного измерения скорости. Таким образом, является возможным в значительной мере регулировать ускоряющие силы, которые получаются в текущем и даже в постоянном режиме работы ковшовой цепи. Это значительно уменьшает износ цепи и приводит к значительному уменьшению времен простоя многоковшового цепного экскаватора.
В предпочтительной форме выполнения изобретения определяют производную скорости цепи, в частности, посредством дифференциатора. При этом является особенным преимуществом, регулировать производную скорости цепи до заданного значения. Таким образом по сравнению с чистым регулированием скорости может быть значительно уменьшен износ цепи.
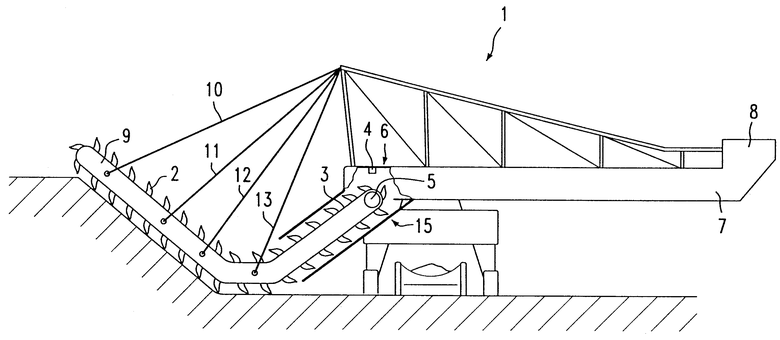
Дальнейшие преимущества и подробности получаются из последующего описания примера выполнения. В этом представленном на чертеже примере выполнения ссылочная позиция 1 обозначает многоковшовый цепной экскаватор, который содержит копающий орган 9, направляемый на канатах 10, 11, 12, 13. Для компенсации веса стрела 7 снабжена уравновешивающим грузом 8. Посредством копающего органа 9 направляемые на цепи 3 ковши 2 направляются для выработки подлежащего выработке материала. Цепь приводят в действие посредством привода 5, расположенного в так называемом машинном здании 6.
Над приводом 5 расположено бесконтактно работающее устройство 4 для бесконтактного измерения скорости цепи 3, с которым соединен регулятор для регулирования безредукторного привода.
Устройство для измерения скорости работает в представленной в виде примера форме выполнения по принципу доплеровского радиолокатора на СВЧ и поставляет, например, непрерывно пропорциональную скорости частоту порядка 62 Гц/м/с. Эту зависящую от скорости частоту подводят к частотному/аналоговому преобразователю, который создает пропорциональный скорости стандартизованный сигнал 0...10 В или соответственно 4...20 мА. В качестве устройств для измерения скорости могут быть использованы также другие бесконтактно работающие устройства для измерения скорости, например ультразвуковые устройства.
Особенно предпочтительным образом бесконтактно измеренный сигнал скорости дифференцируют, и привод регулируют посредством регулятора таким образом, что производная скорости цепи соответствует заданному значению. В постоянном режиме работы при этом задают заданное значение для производной скорости, равное 0. В качестве регуляторов могут использоваться, например, ПИ- или ПИД-регуляторы, а также комплексные регуляторы.
Устройство для измерения скорости расположено на крыше машинного здания 6 многоковшового цепного экскаватора 1 над загрузочной шахтой 15 с направлением излучения к вершине ковшовой рамы. Происходит измерение проходящей цепи. Необходимое для определения скорости отражение высокочастотного излучения, посланного радиолокатором, происходит предпочтительным образом за счет соответственно самой большой облученной площади задних сторон ковшов. Для юстировки устройства для измерения скорости его размещают с возможностью поворота и наклона. За счет особенно предпочтительного расположения устройства для измерения скорости в области привода достигают то, что эффекты времен пробега передачи сил на вытянутом в длину элементе цепи не искажают результата измерения, то есть определяют непосредственную зависимость между формой цепного барабана и скоростью цепи.
Таким образом, названные выше ускоряющие силы в качестве факторов, интенсивирующих износ копающего органа, уменьшаются или соответственно больше не появляются. Это приводит к большим полезным временам работы и тем самым к значительному снижению расходов на техническое обслуживание.
Источники информации
1. DE 19616056 C1, 03.07.1997.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления процессом копания одноковшового экскаватора | 1988 |
|
SU1664981A1 |
| Способ ограничения динамических нагрузок копающих механизмов экскаваторов и устройство для его осуществления | 1978 |
|
SU765470A1 |
| Многоковшовый цепной экскаватор поперечного копания Т.Т.Халикова | 1979 |
|
SU863784A1 |
| Устройство для ограничения динамических нагрузок копающих механизмов экскаватора | 1990 |
|
SU1740571A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ДРАГЛАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2130998C1 |
| Способ управления электроприводом напора экскаватора и устройство для его осуществления | 1986 |
|
SU1430475A1 |
| МНОГОКОВШОВЫЙ ВСКРЫШНОЙ АГРЕГАТ | 2011 |
|
RU2471043C1 |
| Устройство управления электроприводом копающего механизма экскаватора | 1989 |
|
SU1656084A1 |
| Способ автоматического управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1981 |
|
SU977623A1 |
| Устройство управления электроприводами копающих механизмов экскаватора | 1986 |
|
SU1511343A1 |
Изобретение относится к многоковшовому цепному экскаватору с направляемыми на цепи ковшами для применения в установках для открытых горных разработок. Многоковшовый цепной экскаватор с направляемыми на цепи ковшами применяется в установках для открытых горных разработок. Цепь является приводимой в действие посредством приданного многоковшовому цепному экскаватору привода. Привод выполнен в виде непосредственного безредукторного привода. Многоковшовый цепной экскаватор содержит бесконтактно работающее устройство измерения скорости для измерения скорости цепи и соединенный с устройством измерения скорости регулятор для регулирования безредукторного привода. Экскаватор содержит дифференциатор для определения производной значения скорости, измеренного устройством измерения скорости, регулятор для такого регулирования привода, что производная значения скорости, измеренного устройством измерения скорости, соответствует заданному значению. Способ регулирования его привода, содержащего направляемые на цепи ковши многоковшового цепного экскаватора с безредукторным приводом, при котором посредством устройства измерения скорости бесконтактным путем измеряют скорость цепи и посредством регулятора, связанного с устройством измерения скорости, осуществляют регулирование безредукторного привода. В способе определяют производную скорости цепи и регулируют ее до заданного значения. Повышается надежность и производительность работы экскаватора. 2 с. и 4 з.п. ф-лы, 1 ил.
| DE 1961605 C1, 03.07.1997SU 899756 A, 23.01.1982SU 594262 A, 09.02.1978SU105661 A, 08.06.1957SU 203546 A, 13.12.1967SU 433274 A, 25.11.1974RU 2109305 C1, 20.04.1998RU 2010766 C1, 15.04.1994RU 2022894 C1, 15.11.1994 |

