Система сопровождения относится к системам слежения за подвижными объектами. Достигаемым техническим результатом является повышение дальности действия в плохих метеоусловиях и повышение надежности автосопровождения, в том числе и низколетящих объектов. Предложено два варианта решения указанной задачи. В первом варианте оптико-электронный блок соединен с первым входом блока определения координат, который через второй коммутатор подключен к входу первого устройства формирования координат наведения, чей выход подключен первым коммутатором к первому входу устройства наведения и стабилизации, выходной вал устройства наведения и стабилизации кинематически соединен с оптико-электронным блоком и радиолокационным пеленгатором, первый выход устройства наведения и стабилизации соединен с входом первого преобразователя из исполнительной в измерительную систему координат, чей выход, в свою очередь, связан с вторым входом первого сумматора, выход первого сумматора соединен со вторым входом блока определения координат, выход радиолокационного пеленгатора соединен с первым входом второго устройства формирования координат наведения и через первый коммутатор - с входом сглаживающего фильтра, второй вход устройства формирования координат наведения соединен с третьим выходом устройства наведения и стабилизации, первый или второй выход второго устройства формирования координат через первый коммутатор соединен с вторым входом устройства наведения и стабилизации, а третий выход - с входом управления первого коммутатора, через второй коммутатор выход сглаживающего фильтра соединен с входом запоминающего устройства, выход которого соединен с первым входом первого сумматора. Второй вариант отличается тем, что исключено запоминающее устройство и введены последовательно соединенные второй сумматор, второй преобразователь из исполнительной в измерительную систему координат, третий сумматор, вторым входом соединенный с выходом сглаживающего фильтра, а выходом - с первым входом первого сумматора через дополнительные контакты первого коммутатора, первый и второй входы второго сумматора подключены соответственно к четвертому и пятому выходам. 2 с. и 2 з.п.ф-лы, 5 ил.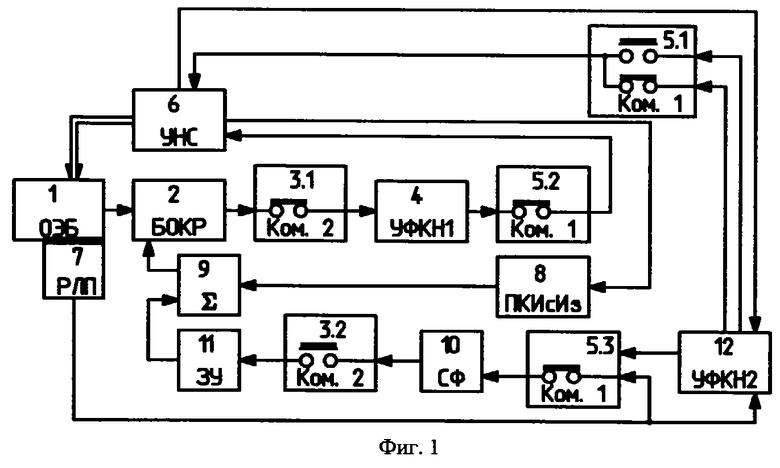
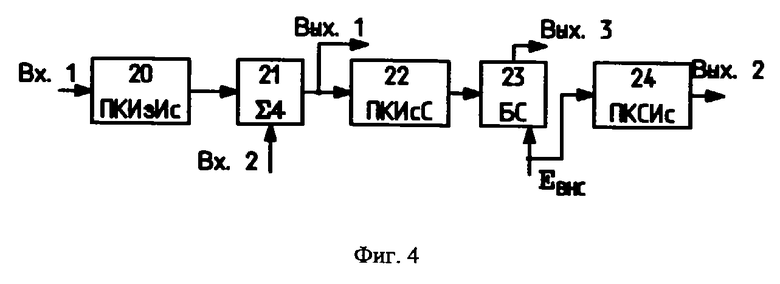
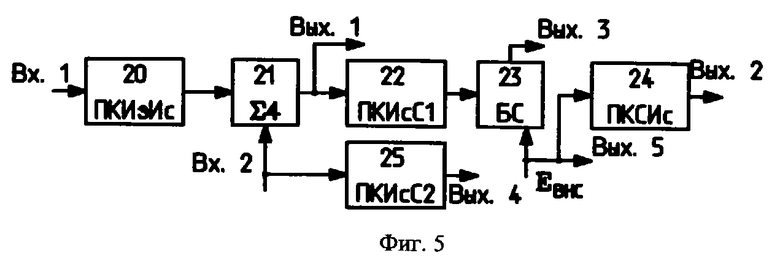
1. Система сопровождения, содержащая первое устройство формирования координат наведения, последовательно соединенные оптико-электронный блок и блок определения координат, последовательно соединенные устройство наведения и стабилизации и преобразователь из исполнительной в измерительную систему координат, причем второй выход устройства наведения и стабилизации кинематически соединен с оптико-электронным блоком, отличающаяся тем, что в нее введены радиолокационный пеленгатор, механически связанный с оптико-электронным блоком, второе устройство формирования координат наведения, первый вход которого соединен с выходом радиолокационного пеленгатора, а второй - с третьим выходом устройства наведения и стабилизации, первый и второй коммутаторы, сглаживающий фильтр и последовательно соединенные запоминающее устройство и сумматор, при этом выход блока определения координат через первый вход и первый выход второго коммутатора подключен ко входу первого устройства формирования координат наведения, выход преобразователя из исполнительной в измерительную систему координат соединен со вторым входом сумматора, чей выход соединен со вторым входом блока определения координат, выход сглаживающего фильтра через второй вход и второй выход второго коммутатора подключен ко входу запоминающего устройства, а вход сглаживающего фильтра через первый выход и первый вход первого коммутатора подключен к выходу радиолокационного пеленгатора, выход первого устройства формирования координат наведения через второй вход и второй выход первого коммутатора подключен к первому входу устройства наведения и стабилизации, второй вход которого через третий выход и третий или четвертый входы первого коммутатора подключен соответственно к первому или второму выходам второго устройства формирования координат наведения, чей третий выход соединен с пятым входом первого коммутатора, являющимся входом управления.2. Система сопровождения по п.1, отличающаяся тем, что второе устройство формирования координат наведения содержит преобразователь из стабилизированной в исполнительную систему координат и последовательно соединенные преобразователь из измерительной в исполнительную систему координат, сумматор, преобразователь из исполнительной в стабилизированную систему координат и блок сравнения, при этом второй вход блока сравнения и вход преобразователя из стабилизированной в исполнительную систему координат соединены между собой и являются входами угла внеосевого сопровождения, первый и второй входы второго устройства формирования координат наведения подключены соответственно ко входу преобразователя из измерительной в исполнительную систему координат и второму входу сумматора, а первый, второй и третий выходы подключены соответственно к выходу сумматора, выходу преобразователя из стабилизированной в исполнительную систему координат и выходу блока сравнения.3. Система сопровождения, содержащая первое устройство формирования координат наведения, последовательно соединенные оптико-электронный блок и блок определения координат, последовательно соединенные устройство наведения и стабилизации и преобразователь из исполнительной в измерительную систему координат, причем второй выход устройства наведения и стабилизации кинематически соединен с оптико-электронным блоком, отличающаяся тем, что в нее введены радиолокационный пеленгатор, механически связанный с оптико-электронным блоком, второе устройство формирования координат наведения, первый вход которого соединен с выходом радиолокационного пеленгатора, a второй - с третьим выходом устройства наведения и стабилизации, первый и второй коммутаторы, первый сумматор, сглаживающий фильтр и последовательно соединенные второй сумматор, преобразователь из стабилизированной в измерительную систему координат и третий сумматор, при этом выход третьего сумматора соединен с первым входом первого сумматора, выход блока определения координат через первый вход и первый выход второго коммутатора подключен ко входу первого устройства формирования координат наведения, выход преобразователя из исполнительной в измерительную систему координат соединен со вторым входом первого сумматора, чей выход соединен со вторым входом блока определения координат, выход сглаживающего фильтра соединен со вторым входом третьего сумматора, а вход сглаживающего фильтра через первый выход и первый вход первого коммутатора подключен к выходу радиолокационного пеленгатора, выход первого устройства формирования координат наведения через второй вход и второй выход первого коммутатора подключен к первому входу устройства наведения и стабилизации, второй вход которого через третий выход и третий или четвертый входы первого коммутатора подключен соответственно к первому или второму выходам второго устройства формирования координат наведения, чей третий выход соединен с пятым входом первого коммутатора, являющимся входом управления, первый вход второго сумматора через четвертый выход и шестой вход первого коммутатора подключен к четвертому выходу второго устройства формирования координат наведения, а второй вход второго сумматора через пятый выход и седьмой вход первого коммутатора подключен к пятому выходу второго устройства формирования координат наведения.4. Система сопровождения по п.3, отличающаяся тем, что второе устройство формирования координат наведения содержит последовательно соединенные преобразователь из измерительной в исполнительную систему координат, сумматор, первый преобразователь из исполнительной в стабилизированную систему координат и блок сравнения, а также преобразователь из стабилизированной в исполнительную систему координат и второй преобразователь из исполнительной в стабилизированную систему координат, при этом второй вход блока сравнения и вход преобразователя из стабилизированной в исполнительную систему координат соединены между собой и являются входами угла внеосевого сопровождения, второй вход сумматора соединен со входом второго преобразователя из исполнительной в стабилизированную систему координат, первый и второй входы второго устройства формирования координат наведения подключены соответственно ко входу преобразователя из измерительной в исполнительную систему координат, второму входу сумматора, а первый, второй, третий, четвертый и пятый выходы подключены соответственно к выходу сумматора, выходу преобразователя из стабилизированной в исполнительную систему координат, выходу блока сравнения, выходу второго преобразователя из исполнительной в стабилизированную систему координат, второму входу бока сравнения.