Изобретение относится к радиотехническим средствам определения направления, местоположения, измерения расстояния или скорости с использованием разнесенных антенн и измерением фазового сдвига или временного запаздывания снимаемых с них сигналов (системы определения разности пути, пройденного сигналом) и, в частности, к способам определения координат передатчиков в системах спутниковой связи.
Известен метод и система, описанные в патенте США 5008679, Н 04 В 7/185 (G 01 S 5/02), опубл. 16.04.91.
Способ определения координат неизвестного передатчика состоит в приеме и переизлучении сигнала передатчика, координаты которого предстоит определить, ретрансляторами, расположенными на борту двух близко расположенных на геостационарной орбите Искусственных Спутников Земли (ИСЗ), прием переизлученных сигналов двумя Земными Станциями и вычислении искомых координат в точке пересечения кривой постоянной временной задержки принятых сигналов с кривой постоянного доплеровского смещения частоты принятых сигналов.
Устройство, реализующее способ, содержит два ИСЗ на геостационарной орбите, принимающих сигнал, излученный неизвестным передатчиком, один по главному лепестку диаграммы направленности, а второй по боковому лепестку диаграммы направленности, земную станцию, содержащую, как минимум, две антенны, которые принимают повторно переданный сигнал от неизвестного передатчика, одна нацелена на один из спутников и другая нацелена на второй спутник в порядке приема сигналов от спутников, два перемножителя, связанные каждый соответственно с первой и второй антенной, первый и второй опорные генераторы, два аттенюатора, связанные каждый соответственно с выходами первого и второго перемножителя, третий и четвертый перемножитель, связанные каждый соответственно с выходами первого и второго аттенюатора, третий и четвертый опорные генераторы, пятый перемножитель, связанный с выходом второго аттенюатора, три низкочастотных фильтра, связанных каждый соответственно с выходами третьего, четвертого и пятого перемножителя, три высокоскоростных аналого-цифровых преобразователя, связанных каждый соответственно с выходами первого, второго и третьего низкочастотного фильтра, цифровое устройство задержки, связанное с выходом первого фильтра, коррелятор, связанный с выходами второго и третьего фильтра и с выходом цифрового устройства задержки, компьютер, связанный с выходом коррелятора.
Недостаток данного способа и устройства состоит в малой площади территории, на которой может быть обнаружен неизвестный передатчик и измерены его координаты, что определяется необходимостью использования двух ИЗС, расположенных достаточно близко на геостационарной орбите.
Наиболее близким по технической сущности к предлагаемому решению является метод и система, описанные в патенте США 5570096, G 01 S 5/02, опубл. 29.10.96.
Способ определения координат неизвестного передатчика в системе спутниковой связи состоит в излучении передатчиком трассировочного сигнала на спутник и приеме, как минимум, одним Земным приемником сигнала, ретранслированного аппаратурой спутника с определением скорости и позиции спутника по принятому сигналу с последующим определением координат неизвестного передатчика в точке пересечения на поверхности Земли кривой постоянной разности прихода сигналов неизвестного передатчика с двух спутников с кривой постоянного значения Доплеровского смещения частоты.
Устройство, реализующее способ, содержит несколько (как минимум, один) Земных приемников трассировочного сигнала, последовательно соединенные Земной передатчик трассировочного сигнала, сеть связи, контроллер/анализатор, модем и телефонную линию, а также устройство определения координат неизвестного передатчика, подключенное к сети связи, причем приемники трассировочного сигнала также подключены к сети связи; передатчик трассировочного сигнала содержит последовательно соединенные GPS антенну, приемник GPS с высокостабильным опорным генератором, генератор псевдослучайной последовательности, модулятор, усилитель мощности, передающую антенну, контроллер передающей антенны, подключенный к передающей антенне, контроллер, соединенный с контроллером передающей антенны и приемником GPS, модем, связанный с контроллером и сетью связи, синтезатор частот, подключенный к усилителю мощности, модулятору, генератору псевдослучайной последовательности, контроллеру и приемнику GPS; Земной приемник трассировочного сигнала содержит последовательно соединенные GPS антенну, приемник GPS, генератор псевдослучайной последовательности, коррелятор, контроллер, модем, подключенный к сети связи, последовательно соединенные приемную антенну, приемник, аналого-цифровой преобразователь, буфер данных, подключенный к контроллеру, контроллер приемной антенны, связанный с приемной антенной и контроллером, причем контроллер связан с приемником GPS, который в свою очередь соединен в приемником, аналого-цифровым преобразователем, высокостабильный опорный генератор приемника GPS соединен с генератором псевдослучайной последовательности, приемником и аналого-цифровым преобразователем, причем аналого-цифровой преобразователь подключен к буферу данных.
Недостаток способа и устройства характеризуется малой площадью территории, на которой могут быть измерены координаты неизвестного передатчика, причиной чего является использование двух ИСЗ, размешенных достаточно близко на геостационарной орбите.
Предлагаемым изобретением достигается технический результат - увеличение площади, на которой могут быть измерены координаты неизвестного передатчика.
Для получения такого технического результата в предлагаемом способе определения координат неизвестного передатчика в системе спутниковой связи, включающем излучение передатчиком трассировочного сигнала на спутник и приеме, как минимум, одним Земным приемником сигнала, ретранслированного аппаратурой спутника, с определением скорости и позиции спутника по принятому сигналу, согласно изобретению формируют массив четырехмерных кластеров, каждый из которых состоит из текущих значений дальности, угла места, азимута спутника и фазы сигнала, излучаемого неизвестным передатчиком, выбирают, как минимум, две виртуальные базы, которые образуются за счет движения спутника, для вычисления координат неизвестного передатчика и вычисляют координаты неизвестного передатчика.
Отличительные признаки предлагаемого способа заключаются в формировании массива четырехмерных кластеров, каждый из которых состоит из текущих значений дальности, угла места, азимута спутника и фазы сигнала, излучаемого неизвестным передатчиком, выбирают, как минимум, четыре наилучших кластера, из которых формируют, как минимум, две виртуальные базы, которые образуются за счет движения спутника, для вычисления координат неизвестного передатчика и вычисляют координаты неизвестного передатчика, что позволяет высокоточно определять координаты неизвестного передатчика, расположенного в любой точке поверхности Земного шара в зоне обслуживания коммуникационного ИСЗ, расположенного на геостационарной орбите.
Для достижения названного технического результата предлагается устройство определения координат неизвестного передатчика в системе спутниковой связи, содержащее генератор псевдослучайной последовательности, модулятор, усилитель мощности, фильтр прием/передача и приемопередающую антенну, контроллер антенны, подключенный к приемопередающей антенне, последовательно соединенные приемник и коррелятор, а также буфер данных и синтезатор частот, связанный с приемником и модулятором, согласно изобретению дополнительно введены последовательно включенные приемник сигнала неизвестного передатчика, связанный с фильтром прием/передача и синтезатором частот, блок коррекции Доплеровского смещения частоты, узел запоминания фазы сигнала, излучаемого неизвестным передатчиком, подключенным к буферу данных, блок измерения дальности, подключенный к буферу данных и коррелятору, последовательно включенные блок выбора, как минимум, четырех кластеров, подключенный к выходу буфера данных, и блок вычисления координат неизвестного передатчика, причем выходы контроллера антенны соединены с буфером данных.
В отличие от известного в предлагаемом устройстве введены последовательно включенные приемник сигнала неизвестного передатчика, связанный с фильтром прием/передача и синтезатором частот, блок коррекции Доплеровского смещения частоты, узел запоминания фазы сигнала, излучаемого неизвестным передатчиком, подключенным к буферу данных, блок измерения дальности, подключенный к буферу данных и коррелятору, последовательно включенные блок выбора, как минимум, четырех кластеров, подключенный к выходу буфера данных, и блок вычисления координат неизвестного передатчика, причем выходы контроллера антенны соединены с буфером данных, что позволяет высокоточно измерять координаты неизвестного передатчика в системе спутниковой связи, который может быть расположен в любой точке поверхности Земного шара в зоне обслуживания коммуникационного ИСЗ, расположенного на геостационарной орбите.
На чертеже представлена структурная схема заявляемого устройства.
Предлагаемый способ определения координат неизвестного передатчика осуществляют в следующей последовательности.
Излучение передатчиком трассировочного сигнала на спутник, с целью точного определения текущих координат ИСЗ, прием, как минимум, одним Земным приемником сигнала, ретранслированного аппаратурой спутника, формирование массива четырехмерных кластеров, каждый из которых состоит из текущих дальности, угла места, азимута спутника и фазы сигнала, излучаемого неизвестным передатчиком, выбор, как минимум, четырех наилучших кластеров, из которых формируются, как минимум, две виртуальные базы, которые образуются за счет движения спутника, для вычисления координат неизвестного передатчика и вычисление координаты неизвестного передатчика.
Осуществление предлагаемого способа определения координат неизвестного передатчика на предлагаемом устройстве следующее. Приемопередающая антенна передает и принимает трассировочный сигнал, по которому определяется дальность ИСЗ, а также принимает сигнал неизвестного передатчика. Измерение дальности ИСЗ производится путем оценки времени запаздывания сигнала, формируемого генератором псевдослучайной последовательности (ПСП). В корреляторе производится сравнение по времени излученной и принятой ПСП, что позволяет вычислить задержку по времени принятой ПСП относительно излученной ПСП, т.е. дальность ИСЗ. Контроллер антенны обеспечивает измерение азимута и угла места (синоним - угол высоты) ИСЗ относительно Земной Станции. Данные об азимуте, угле места и дальности исчерпывающим образом описывают положение ИСЗ. Эти данные заносятся в буфер данных. Сигнал неизвестного передатчика принимается приемником сигнала неизвестного передатчика, где производится компенсация Доплеровского смещения частоты, оценка и запоминание текущей фазы несущей частоты сигнала неизвестного передатчика. Это значение является четвертым в кластере текущих параметров: азимут, угол места, дальность и фаза сигнала. Оценка значений параметров кластера производится для одного момента времени. В буфере данных производится выбор, как минимум, 4-х кластеров, сгруппированных в пары. Одна из пар представляет собой одну эквивалентную виртуальную базу, в концах которой фаза сигнала неизвестного передатчика соответствует записанным значениям. Координаты концов виртуальной базы заданы другими параметрами в выбранных кластерах. Зная эти координаты, легко вычислить пространственное расположение виртуальной базы относительно экваториально-меридиональной плоскостей и ее длину. Вторая пара из выбранных кластеров таким же путем определяет вторую виртуальную базу. Критерием выбора кластеров из накопленного массива является степень близости угла пересечения баз к 90o, при котором минимизируется погрешность определения координат неизвестного передатчика. Вычисляются координаты неизвестного передатчика.
Предлагаемое устройство определения координат неизвестного передатчика содержит (чертеж): приемопередающую антенну 1, контроллер антенны 2, фильтр прием/передача 3, усилитель мощности 4, модулятор 5, синтезатор частот 6, генератор псевдослучайной последовательности 7, приемник 8, коррелятор 9, приемник сигнала неизвестного передатчика 10, буфер данных 11, блок коррекции Доплеровского смещения частоты 12, узел запоминания фазы 13 сигнала, излучаемого неизвестным передатчиком, бок выбора, как минимум, 4-х кластеров 14, блок вычисления координат неизвестного передатчика 15, блок измерения дальности 16.
Предлагаемое устройство определения координат неизвестного передатчика, работает следующим образом.
Приемопередающая антенна 1 служит для передачи и приема трассировочного сигнала, по которому определяется дальность ИСЗ, а также приема сигнала неизвестного передатчика. Измерение дальности ИСЗ производится путем оценки времени запаздывания сигнала, формируемого генератором псевдослучайной последовательности (ПСП) 7. В прототипе этот сигнал назван трассировочным. ПСП модулирует в модуляторе 5 несущую частоту, формируемую в синтезаторе частот 6. Модулированный сигнал усиливается в усилителе мощности 4 и через фильтр прием/передача 3 излучается с помощью приемопередающей антенны в сторону ИСЗ, часть ресурса которого оказалась захваченной неизвестным передатчиком. Сигнал ПСП, ретранслированный аппаратурой ИСЗ, преобразуется приемопередающей антенной 1, проходит фильтр прием/передача 3 и принимается приемником 8. В корреляторе 9 производится сравнение по времени излученной и принятой ПСП, что позволяет вычислить задержку по времени принятой ПСП относительно излученной ПСП, и далее в блоке измерения дальности 16, измерить дальность ИСЗ. Приемопередающая антенна 1 работает в режиме слежения за перемещениями ИСЗ. Это производится потому, что угловая ширина диаграммы направленности антенн спутниковой связи, как правило, значительно меньше углового размера траектории суточного перемещения ИСЗ, которая напоминает цифру "8". Слежение приемопередающей антенны за перемещением ИСЗ осуществляет контроллер антенны 2, который таким образом обеспечивает измерение азимута и угла места (синоним - угол высоты) ИСЗ относительно Земной Станции. Данные об азимуте, угле места и дальности исчерпывающим образом описывают положение ИСЗ. Эти данные заносятся в буфер данных 11. Сигнал неизвестного передатчика принимается приемником сигнала неизвестного передатчика 10, в узле 12 производится компенсация Доплеровского смещения частоты, а в блоке 13 - оценка и запоминание текущей фазы несущей частоты сигнала неизвестного передатчика. Это значение является четвертым в кластере текущих параметров: азимут, угол места, дальность и фаза сигнала. Оценка значений параметров кластера производится для одного момента времени. В буфере данных 11 производится накопление достаточно большого количества кластеров. В блоке 14 производится выбор, как минимум, 4-х кластеров, сгруппированных в пары. Одна из пар представляет собой одну эквивалентную виртуальную базу, в концах которой фаза сигнала неизвестного передатчика соответствует записанным значениям. Координаты концов виртуальной базы заданы другими параметрами в выбранных кластерах. Зная эти координаты, легко вычислить пространственное расположение виртуальной базы относительно экваториально-меридиональной плоскостей и ее длину. Вторая пара из выбранных кластеров таким же путем определяет вторую виртуальную базу. Критерием выбора кластеров из накопленного массива является степень близости угла пересечения виртуальных баз к 90o, при котором минимизируется погрешность определения координат неизвестного передатчика. В блоке 15 вычисляются координаты неизвестного передатчика.
Применение данного изобретения дает возможность высокоточного определения координат неизвестного передатчика, расположенного в любой точке поверхности Земного шара в зоне обслуживания коммуникационного ИСЗ, расположенного на геостационарной орбите.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ НЕИЗВЕСТНОГО ПЕРЕДАТЧИКА В СИСТЕМЕ СПУТНИКОВОЙ СВЯЗИ | 2003 |
|
RU2254589C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ НЕИЗВЕСТНОГО ПЕРЕДАТЧИКА | 2001 |
|
RU2215300C2 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2007 |
|
RU2348560C1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2004 |
|
RU2278047C1 |
| СПОСОБ СЛИЧЕНИЯ ШКАЛ ВРЕМЕНИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2389054C1 |
| Система мониторинга состояния льда и окружающей среды | 2019 |
|
RU2715845C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2337388C1 |
| СПОСОБ ОПЕРАТИВНОГО ИССЛЕДОВАНИЯ АТМОСФЕРЫ, ЗЕМНОЙ ПОВЕРХНОСТИ И ОКЕАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2254600C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 2019 |
|
RU2714672C1 |
Изобретение относится к радиотехническим средствам определения направления, местоположения, измерения фазового сдвига с использованием разнесенных антенн. Технический результат заключается в увеличении площади территории, на которой могут быть измерены координаты неизвестного передатчика. Для этого формируют массив четырехмерных кластеров, каждый из которых состоит из текущих значений дальности, угла места, азимута спутника и фазы сигнала, излучаемого неизвестным передатчиком, выбирается, как минимум, две базы для вычисления координат неизвестного передатчика, одна из которых лежит в меридиальной плоскости, а вторая - в плоскости экватора, и вычисляются координаты неизвестного передатчика. 2 с.п.ф-лы, 1 ил.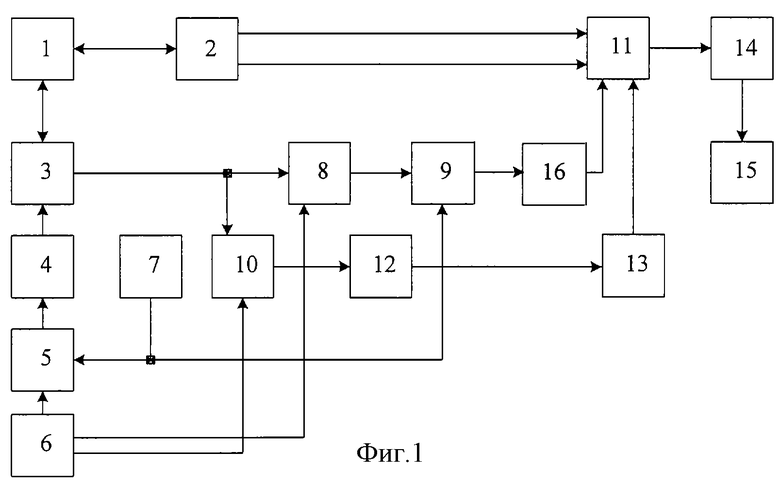
| US 5570096 А, 29.10.1996 | |||
| US 5008679 А, 16.04.1991 | |||
| US 6147640 А, 14.11.2000 | |||
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ (ВАРИАНТЫ) | 1997 |
|
RU2122217C1 |

