Изобретение относится к области электротехники и может быть использовано в следящих системах любого назначения, в том числе для электроприводов, работающих во взрывоопасной среде, например, в угольных шахтах, на газовых промыслах и газоперекачивающих станциях, в химических производствах и т.п.
В электротехнике широкое распространение получили электроприводы и способы управления ими с использованием обратной связи. Наиболее близким к заявляемому изобретению по совокупности существенных признаков является способ управления электроприводом, включающий формирование командного сигнала, как временной функции от заданного угла поворота выходного вала электропривода, измерение фактического угла поворота выходного вала электропривода, формирование сигнала обратной связи, как функции от фактического угла поворота выходного вала электропривода, формирование управляющего сигнала, как разницы командного сигнала и сигнала обратной связи, преобразование управляющего сигнала в управляющее магнитное поле и воздействие управляющим магнитным полем на магнитное поле ротора электропривода. Способ управления реализован в электроприводе, содержащем задатчик угла поворота выходного вала электропривода, датчик угла поворота выходного вала электропривода и контур управления, включающий в себя блок вычитания, выход которого через усилитель мощности подключен к электродвигателю (см. Попков С.Л. Основы следящего электропривода. Изд. 2-е перер. и доп. М.: Государственное издательство оборонной промышленности, 1958, с.175-176). В конкретном исполнении электропривода блок вычитания представляет собой сельсин-трансформатор, на входы которого непосредственно подаются сигналы с задатчика угла поворота и датчика фактического угла поворота вала электропривода. Разница входных сигналов определяет рассогласование заданного и фактического углов поворота выходного вала и преобразуется далее в усилителе мощности в управляющий сигнал. Данный способ управления наиболее успешно применяется в электроприводах с коллекторным электродвигателем постоянного тока с углом поворота ротора в пределах 360o, что ограничивает использование в следящих системах иных типов электроприводов. Для поворота на больший угол требуются специальные системы для формирования временной функции от заданного угла поворота выходного вала электропривода, так как при измерении фактического угла поворота выходного вала после поворота его на 360o (один оборот) отсчет фактического угла поворота начинается с нуля и требуется приведение временной функции заданного угла поворота к нулю. Это усложняет прямое управление электроприводом по углу поворота с углом поворота больше 360o. Теоретически данный способ и соответствующая ему схема электропривода могут быть применены в электроприводе с бесколлекторным электродвигателем, но только при малых углах поворота выходного вала электродвигателя.
Задачей, на решение которой направлено заявляемое изобретение, является разработка способа управления электроприводом и соответствующей ему схемы электропривода, позволяющих использовать в следящих системах электродвигатели как постоянного, так и переменного тока, в том числе бесколлекторные электродвигатели. Другой задачей изобретения является разработка способа управления электроприводом и соответствующей ему схемы электропривода, обеспечивающих прямое управление электроприводом по углу поворота, в том числе с поворотом выходного вала электропривода на угол больше 360o. Дополнительной задачей изобретения является разработка способа управления электроприводом и самого электропривода, обеспечивающего повышенную безопасность электропривода путем использования в следящих системах бесколлекторных электродвигателей.
Поставленные технические задачи решаются тем, что в способе управления электроприводом, включающем формирование командного сигнала как временной функции от заданного угла поворота выходного вала электропривода, измерение фактического угла поворота выходного вала электропривода, формирование сигнала обратной связи, как функции от фактического угла поворота выходного вала электропривода, формирование управляющего сигнала, как разницы командного сигнала и сигнала обратной связи, преобразование управляющего сигнала в управляющее магнитное поле и воздействие управляющим магнитным полем на магнитное поле ротора электропривода, согласно изобретению, командный сигнал формируют пропорционально синусу текущего значения заданного угла поворота выходного вала электропривода, сигнал обратной связи формируют пропорционально синусу фактического значения угла поворота выходного вала электропривода, а управляющий сигнал - как разницу между ними.
При этом формируют дополнительный командный сигнал пропорционально косинусу текущего значения заданного угла поворота выходного вала электропривода, дополнительный сигнал обратной связи, пропорциональный косинусу фактического угла поворота выходного вала электропривода, и дополнительный управляющий сигнал, как разницу между ними, преобразуют дополнительный управляющий сигнал в дополнительное управляющее магнитное поле и суммируют дополнительное управляющее магнитное поле с основным магнитным полем.
Для электропривода поставленные технические задачи решаются тем, что в электроприводе, содержащем задатчик угла поворота выходного вала электропривода, датчик угла поворота выходного вала электропривода и контур управления, включающий в себя блок вычитания, выход которого через усилитель мощности подключен к электродвигателю, согласно изобретению, в контур управления введены два нелинейных преобразователя, при этом задатчик угла поворота выходного вала электропривода через первый нелинейный преобразователь соединен с первым входом блока вычитания, а датчик угла поворота выходного вала электропривода через второй нелинейный преобразователь подключен ко второму входу блока вычитания.
При этом в качестве первого и второго нелинейных преобразователей использованы синусные преобразователи.
Кроме того, в электроприводе использован электродвигатель с двумя обмотками и электропривод снабжен дополнительным контуром управления, включающим в себя третий и четвертый нелинейные преобразователи, дополнительный блок вычитания и дополнительный усилитель мощности, при этом задатчик угла поворота выходного вала электропривода дополнительно соединен через третий нелинейный преобразователь с первым входом дополнительного блока вычитания, а датчик угла поворота выходного вала электропривода через четвертый нелинейный преобразователь подключен ко второму входу второго дополнительного блока вычитания, выход которого через дополнительный усилитель мощности подключен ко второй обмотке электродвигателя.
При этом в качестве третьего и четвертого нелинейных преобразователей использованы косинусные преобразователи.
Сущность изобретения - способа управления электроприводом и соответствующей ему схемы электропривода, заключается в том, что, используя соответствующие первый и второй нелинейные преобразователи, командный сигнал и сигнал обратной связи формируют в виде периодических функций, зависящих от текущего значения заданного угла поворота выходного вала электропривода и фактического значения угла поворота выходного вала электропривода, в частности, пропорциональных синусам указанных углов, что обеспечивает одинаковую нормированную закономерность этих сигналов вне зависимости от величины угла поворота выходного вала электропривода и автоматическое обнуление указанных сигналов и, соответственно, разницы между ними, при переходе через 360o, что делает данный способ универсальным для любого угла поворота выходного вала электропривода. Для электроприводов, использующих бесколлекторные электродвигатели, данный способ позволяет учесть изменение знака управляющего воздействия при повороте ротора электродвигателя на угол больше 180o.
Формирование дополнительного командного сигнала пропорционально косинусу текущего значения заданного угла поворота выходного вала электропривода, дополнительного сигнала обратной связи пропорционально косинусу фактического угла поворота выходного вала электропривода и дополнительного управляющего сигнала, как разницы между ними с преобразованием дополнительного управляющего сигнала в дополнительное управляющее магнитное поле и суммированием дополнительного управляющего магнитного поля с основным магнитным полем и включение в схему электропривода дополнительного контура управления с введением в него соответствующих выполняемым операциям третьего и четвертого нелинейных преобразователей, обеспечивает высокую точность управления как при углах поворота выходного вала электропривода, например, в пределах 60o, так и при углах поворота больше 60o, особенно при повороте выходного вала электропривода на угол, синус которого равен нулю.
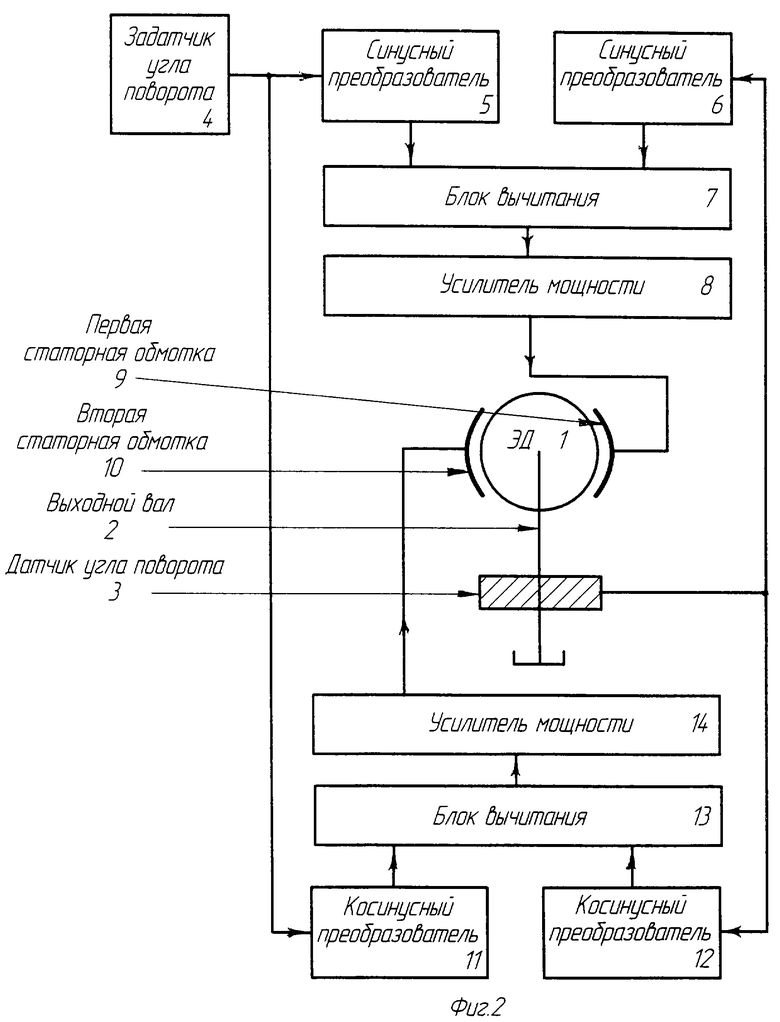
На фиг.1 и 2 показаны блок-схемы двух исполнений электропривода, использующих предлагаемый способ управления.
Электропривод, показанный на фиг.1, содержит электродвигатель 1, например, бесколлекторный, выходной вал 2 которого является выходным валом электропривода. На выходном валу 2 установлен датчик 3 угла поворота. Электропривод управляется от задатчика 4 угла поворота выходного вала электропривода. В контур управления электроприводом входят два нелинейных преобразователя, в качестве которых используются синусные преобразователи 5 и 6, блок 7 вычитания и усилитель мощности 8. Задатчик 4 угла поворота выходного вала электропривода через первый синусный преобразователь 5 соединен с первым входом блока 7 вычитания. Датчик 3 угла поворота выходного вала электропривода через второй синусный преобразователь 6 соединен со вторым входом блока 7 вычитания. Выход блока 7 вычитания соединен с входом усилителя 8 мощности, выход которого подключен к статорной обмотке 9 электродвигателя 1.
Во втором исполнении, показанном на фиг.2, электродвигатель имеет первую статорную обмотку 9 и вторую статорную обмотку 10. Электропривод снабжен дополнительным контуром управления, включающим в себя третий и четвертый нелинейные преобразователи, в качестве которых используются два косинусных преобразователя 11 и 12, дополнительный блок 13 вычитания и дополнительный усилитель 14 мощности. Задатчик 4 угла поворота выходного вала электропривода дополнительно соединен через первый косинусный преобразователь 11 с первым входом блока 13 вычитания, а датчик 3 угла поворота выходного вала электропривода через второй косинусный преобразователь 12 подключен ко второму входу блока 13 вычитания. Выход блока 13 вычитания соединен с входом усилителя 14 мощности, выход которого подключен ко второй статорной обмотке 10 электродвигателя.
В первом примере исполнения предлагаемый способ управления электроприводом реализуется следующим образом. При отработке электроприводом заданного угла поворота, задатчик 4 угла поворота вырабатывает командный сигнал, как временную функцию от заданного угла поворота выходного вала электропривода. Фактический угол поворота выходного вала электропривода, в рассматриваемом примере - выходного вала 2 электродвигателя 1, замеряется датчиком 3. Командный сигнал с задатчика 4 поступает на синусный преобразователь 5, на выходе которого формируется сигнал, пропорциональный синусу заданного угла поворота выходного вала электропривода. Сигнал с датчика 3 угла поворота, соответствующий фактическому углу поворота выходного вала электропривода, поступает на синусный преобразователь 6, на выходе которого формируется сигнал, пропорциональный синусу фактического значения угла поворота выходного вала электропривода. Оба синусных сигнала с выходов преобразователей 5 и 6 поступают в блок вычитания 7, где формируется управляющий сигнал, равный разнице между ними. Этот управляющий сигнал поступает на усилитель 8 мощности, а усиленный сигнал поступает на статорную обмотку 9, где преобразуется в управляющее магнитное поле, воздействующее на магнитное поле ротора электродвигателя. В зависимости от знака рассогласования двух синусных функций происходит либо усиление, либо ослабление управляющего магнитного поля. В электроприводах, использующих бесколлекторные электродвигатели, данный способ управления учитывает изменение полярности управляющего магнитного поля при повороте ротора электродвигателя на угол больше 180o, так одновременно изменяется знак синусной функции (с положительного - на отрицательное). Аналогичное изменение полярности магнитного поля и знака синусной функции происходит при повороте на угол больше 360o.
Второй пример исполнения предлагаемого способа управления электроприводом предполагает одновременно с выполнением всех операций, описанных в первом примере исполнения, дополнительное воздействие на ротор электродвигателя, заключающееся в следующем. При отработке электроприводом заданного угла поворота командный сигнал с задатчика 4 дополнительно подается на косинусный преобразователь 11, на выходе которого формируется сигнал, пропорциональный косинусу заданного угла поворота выходного вала электропривода. Сигнал с датчика 3 угла поворота, соответствующий фактическому углу поворота выходного вала электропривода, дополнительно подается на косинусный преобразователь 12, на выходе которого формируется сигнал, пропорциональный косинусу фактического значения угла поворота выходного вала электропривода. Оба косинусных сигнала с выходов преобразователей 11 и 12 поступают в блок вычитания 13, где формируется дополнительный управляющий сигнал, равный разнице между ними. Этот управляющий сигнал поступает на усилитель 14 мощности, а усиленный сигнал поступает на статорную обмотку 10, где преобразуется в дополнительное управляющее магнитное поле, воздействующее совместно с основным управляющим магнитным полем от статорной обмотки 9 на магнитное поле ротора электродвигателя. В зависимости от знака рассогласования двух косинусных функций происходит либо усиление, либо ослабление дополнительного управляющего магнитного поля. В электроприводах, использующих бесколлекторные электродвигатели, данный способ управления учитывает необходимость изменения полярности дополнительного управляющего магнитного поля при повороте ротора электродвигателя на угол больше 90o, так одновременно изменяется знак косинусной функции (с положительного - на отрицательное). Аналогичное изменение полярности дополнительного магнитного поля и знака косинусной функции происходит при повороте на угол больше 270o.
Предлагаемый способ может быть реализован в следящих электроприводах с использованием современных электронных компонентов, производство которых хорошо отработано как отечественной, так и зарубежной промышленностью. В частности, в качестве датчика и задатчика угла поворота выходного вала электропривода могут использоваться потенциометрические датчики угла типа ПТП-2-1 Киевского завода "Электроприбор". При проектировании синусных и косинусных преобразователей могут использоваться схемы аналогичных преобразователей, описанные в книге: С. Сокпоф. Аналоговые интегральные схемы. - М.: Мир, 1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И ЭЛЕКТРОПРИВОД | 2007 |
|
RU2361355C1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА СЛЕДЯЩЕГО ПНЕВМО- ИЛИ ГИДРОПРИВОДА И СЛЕДЯЩИЙ ПНЕВМО- ИЛИ ГИДРОПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2002 |
|
RU2218487C2 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА СЛЕДЯЩЕГО ПНЕВМО- ИЛИ ГИДРОПРИВОДА | 2009 |
|
RU2472978C2 |
| СЛЕДЯЩИЙ ПНЕВМО- ИЛИ ГИДРОПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2009 |
|
RU2473822C2 |
| Моментный вентильный электропривод | 1985 |
|
SU1310962A1 |
| Электропривод переменного тока | 1989 |
|
SU1757041A1 |
| Вентильный электропривод | 1988 |
|
SU1713072A1 |
| СПОСОБ НАСТРОЙКИ ВЕНТИЛЬНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2014 |
|
RU2556884C1 |
| ЭЛЕКТРОПРИВОД | 1994 |
|
RU2074505C1 |
| Способ управления вентильным электродвигателем и устройство для его осуществления | 1990 |
|
SU1823082A1 |
Изобретение относится к области электротехники и может быть использовано в следящих системах любого назначения. В основе способа управления электроприводом лежит изменение управляющего магнитного поля, пропорционально разности командного сигнала и сигнала обратной связи, при этом командный сигнал формируют пропорционально синусу текущего значения заданного угла поворота выходного вала электропривода, сигнал обратной связи формируют пропорционально синусу фактического значения угла поворота выходного вала электропривода, а управляющий сигнал - как разницу между ними. Электропривод, реализующий данный способ, содержит задатчик угла поворота выходного вала электропривода, датчик угла поворота выходного вала электропривода и контур управления, включающий в себя блок вычитания, выход которого через усилитель мощности подключен к электродвигателю. В контур управления электроприводом введены два нелинейных преобразователя, при этом задатчик угла поворота выходного вала электропривода через первый нелинейный преобразователь соединен с первым входом блока вычитания, а датчик угла поворота выходного вала электропривода через второй нелинейный преобразователь подключен ко второму входу блока вычитания, причем в качестве первого и второго нелинейных преобразователей использованы синусные преобразователи. 2 с. и 2 з.п. ф-лы, 2 ил.
| ПОПКОВ С.Л | |||
| Основы следящего электропривода, изд | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| и доп | |||
| - М.: Государственное издательство оборонной промышленности, 1958, с | |||
| Ручной прибор для загибания кромок листового металла | 1921 |
|
SU175A1 |
| ЭЛЕКТРОПРИВОД | 1995 |
|
RU2087068C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 1994 |
|
RU2074504C1 |
| ЭЛЕКТРОПРИВОД | 1994 |
|
RU2074505C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСКОЛЛЕКТОРНЫМ ТРАНЗИСТОРНЫМ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА | 0 |
|
SU186018A1 |
| Вентильный электропривод | 1974 |
|
SU674163A1 |
| Способ управления вентильным электродвигателем и устройство для его осуществления | 1990 |
|
SU1823082A1 |
| Окуляр микроскопа | 1986 |
|
SU1363117A1 |
| US 4135120 А, 16.01.1979 | |||
| Способ определения координаты трещины при испытаниях металлических конструкций | 1978 |
|
SU872949A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

