Изобретение относится к электротехнике, в частности к моментным электродвигателям с неограниченным углом поворота ротора, и может быть использовано в прецизионных следящих системах и в натяжных устройствах.
Целью изобретения является повышение точности управления электромагнитным моментом вентильного электродвигателя.
На чертеже изображена функциональная схема моментного вентильного электродвигателя.
Моментный вентильный электродвигатель содержит двухфазную синхронную электрическую машину 1, ротор 2 которой ,„ сочленен с синусно-косинусным датчиком 3 положения ротора, два датчика 4 и 5 тока, включенные в цепи секций 6 и 7 якорной обмотки двухфазной синхронной электрической машины 1, два двухвходовых усиВыполнение функциональных преобразователей 14 и 19 может быть различным и зависит от формы ЭДС двухфазной синхронной электрической машины 1. При си- 0 нусоидальной ЭДС функциональные преобразователи 14 и 19 могут быть выполнены в виде линейных усилителей или повторителей напряжения, при трапецеидальной или близкой к прямоугольной формах - в виде усилителей-ограничителей с одинаковым ограничением выходного напряжения обеих полярностей. В общем случае функциональные преобразователи 14, 19 могут быть выполнены в виде диодных функциональных преобразователей с функцией прелителя 8 и 9 тока, к выходам которых под- 20 образования, позволяющей из синусоиключены секции 6 и 7 якорной обмотки, а к нервым входам - выходы соответствующих датчиков 4 и 5 тока, блок 10 сложения, блок 11 вычитания, два блока 12, 13 умножения и функциональный преобразователь 14 формы напряжения. В электропривод введены задатчик 15 электромагнитного момента, блок 16 определения знака напряжения, блок 17 изменения знака напряжения, регулирующий усилитель 18, второй функциональный преобразователь 19 формы напряжения, два предварительных усилителя 20 и 21, два управляемых усилителя 22 и 23, блок 24 выделения модуля напряжения и блок 25 реверса, при этом к выходу задатчика 15 электромагнитного модального напряжения синусно-косинусного датчика положения ротора 3 получить электрический сигнал, форма которого соответствует форме ЭДС двухфазной синхрон- 25 ной электрической машины 1.
Моментный вентильный электродвигатель работает следуюшим образом.
Выходное напряжение задатчика 15 30 электромагнитного момента, соответствующее по величине и полярности заданному значению и направлению электромагнитного момента электродвигателя, сравнивается в блоке 11 вычитания с выходным напряжением б. юка 17 изменения знака, предмента подключены через блок 16 определе- 35 ставляющим собой напряжение обратной
ния знака напряжения управляющий вход блока 17 изменения знака напряжения и непосредственно один из входов блока 11 вычитания, второй вход которого соединен с выходом блока 17 изменения знака напряжения, а выход через регулирующий усилитель 18 - с входом блока 24 выделения модуля напряжения и с входом блока 25 реверса, к выходу которого подключен вход синусно-косинусного датчика 3 положения
40
связи по электромагнитному моменту электродвигателя. Выходное напряжение блока 11 вычитания, равное разности выходных напряжений задатчика 15 электромагнитного момента и блока 17 изменения знака напряжения и одинаковой с ними полярности, усиливается регулирующи.м усилителем 18. Его выходное напряжение подается на входы блока 24 выделения модуля напряжения и блока 25 реверса. В блоке
ротора, к одному из выходов которого при- 5 25 реверса формируется электрический сигсоединены входы первого предварительного усилителя 20 и первого управляемого усилителя 22, а к другому - соответственно входы второго предварительного усилителя 21 и второго управляемого усилителя 23; управляющие входы управляемых усилителей подключены к выходу блока 24 выделения модуля напряжения, а их выходы соединены с вторыми входами соответствующих двухвходовых усилителей 8, 9 тока, выходы предварительных усилителей 20, 21 через соответственно первый и второй функциональные преобразователи 14, 19 подключены к первым входам соответствую„
щих блоков 12, 13 умножения, вторые входы которых присоединены к выходам соответствующих датчиков 4, 5 тока, а выходы - к входам блока 10 сложения, выход которого подключен к входу блока 17 изменения знака напряжения.
Выполнение функциональных преобразователей 14 и 19 может быть различным и зависит от формы ЭДС двухфазной синхронной электрической машины 1. При си- нусоидальной ЭДС функциональные преобразователи 14 и 19 могут быть выполнены в виде линейных усилителей или повторителей напряжения, при трапецеидальной или близкой к прямоугольной формах - в виде усилителей-ограничителей с одинаковым ограничением выходного напряжения обеих полярностей. В общем случае функциональные преобразователи 14, 19 могут быть выполнены в виде диодных функциональных преобразователей с функцией пре0 образования, позволяющей из синусоидального напряжения синусно-косинусного датчика положения ротора 3 получить электрический сигнал, форма которого соответствует форме ЭДС двухфазной синхрон- ной электрической машины 1.
Моментный вентильный электродвигатель работает следуюшим образом.
Выходное напряжение задатчика 15 электромагнитного момента, соответствующее по величине и полярности заданному значению и направлению электромагнитного момента электродвигателя, сравнивается в блоке 11 вычитания с выходным напряжением б. юка 17 изменения знака, представляющим собой напряжение обратной
связи по электромагнитному моменту электродвигателя. Выходное напряжение блока 11 вычитания, равное разности выходных напряжений задатчика 15 электромагнитного момента и блока 17 изменения знака напряжения и одинаковой с ними полярности, усиливается регулирующи.м усилителем 18. Его выходное напряжение подается на входы блока 24 выделения модуля напряжения и блока 25 реверса. В блоке
25 реверса формируется электрический сиг
нал, определяющий заданное направление развиваемого электродвигателем электромагнитного момента, который поступает на вход синусно-косинусного датчика 3 положения ротора. На его выходе возникают два гармонических напряжения с постоянной амплитудой, сдвинутых одно односи- тельно другого на 90 эл. град. Они поступают одновременно на входы управляемых усилителей 22, 23 и входы соответствующих предварительных усилителей 20, 21. На управляющие входы управляе.мых. усилителей 22, 23 с выхода блока 24 выделения модуля напряжения подается напряжение
постоянной полярности, равное по абсолютной величине выходному напряжению регулирующего усилителя 18. Коэффициенты усиления управляемых усилителей 22, 23 изменяются прямо пропорционально величине этого напряжения. Усиленные ими выходные напряжения синусно-косинусного датчика 3 положения ротора поступают на вторые входы двухвходовых усилителей 8 и 9 тока, в которых они сравниваются с действительными значениями токов секций 6 и 7 якорной обмотки, поступающими от соответствующих датчиков 4, 5 тока на первые входы этих усилителей тока. В итоге усилители 8, 9 тока формируют в секциях 6, 7 якорной обмотки токи, соответствующие по форме и прямо пропорциональные по величине входным напряжениям управляемых усилителей 22, 23. Эти токи создают в статоре двухфазной синхронной электрической мащины 1 магнитное поле. В результате взаимодействия его с магнитным поле.м ротора 2 образуется электромагнитный момент электродвигателя, величина которого определяется по формуле
Мзн(а)
еб(а)1б(а)+ e7(a)i7(a)
соэд(а)
е А - угол поворота ротора 2 двухфазной синхронной электрической машины 1, эл. град;
эм() за висим ость электромагнитного момента электродвигателя от угла поворота ротора 2;
Р эмС Ьзависимость электромагнитной мощности электродвигателя от угла поворота ротора 2; Wэ,((i)-зaвиcиMocть частоты вращения электродвигателя от угла поворота ротора 2;
бб), -зависимости ЭДС секций 6 и 7 г(} якорной обмотки соответственно
от угла поворота ротора 2; ц(с1.) - зависимости токов секций 6 и 7 Ivf) якорной обмотки соответственно
от угла поворота ротора 2. Принимая во внимание, что
еб(СС) СеФт.Шад(а)б(ос),
е7(а) СеФжШ,л{а)Г7(а),
где
Се -постоянная электродвигателя-; Фгп-максимальное значение магнитного потока в направлении продольной оси полюсов ротора 2; feC -), fr()-функции, отражающие характер изменения ЭДС секций 6, 7 якорной обмотки в зависимости от угла поворота ротора 2 при постоянном значении частоты вращения ротора 2, т.е. итэд (ot ) const, выражение (1) имеет вид
Мз«()Се%,Г, (Л) l,()+i-,),(f,)l( i
Одновременно с этим на выходах функциональных преобразователей 14 и 19, на входы которых поступают усиленные соответствующими предварительными усилителями 20, 21 выходные напряжения синусно-косинусного датчика 3 положения ротора, возникают напряжения:
U. и );(5}
Ц, (c)(i); и„ (ct) U9™f« (d).
(6)
15
20
25
30
35
40
45
50
55
где , -зависимости выходных напря- UwC) жёний функциональных преобразователей 11 и 19 от угла поворота ротора 2;
, - максимальные значения выход- Ut9m ных напряжений функциональных преобразователей 14 и 19; fttW, -функции, отражающие харак- fi9(ct) тер изменения выходных напряжений функциональных преобразователей 14, 19 в зависимости от угла поворота ротора 2.
Выходные напряжения функциональных преобразователей 14, 19 подаются на первые входы соответствующих блоков 12, 13 умножения. На их вторые входы с выходов датчиков 4, 5 тока поступают напряжения:
и, (i) (); (7) U5() K5iy(i), C8)
где К KS - коэффициенты пропорциональности между токами секций 6, 7 якорной обмотки и выходными напряжениями соответствующих датчиков 4, 5 тока.
В связи с тем, что полярность напряжений, поступающих на оба входа каждого блока 12, 13 умножения, всегда одинакова, их выходные напряжения имеют положительную полярность. После сложения выходных напряжений блоков умножения в блоке 10 сложения и выполнения условий: UH и,д,„ Um; K, зависимость его выходного напряжения от угла поворота ротора 2 имеет вид
Цо(оС) (d.)(9)
Если формы выходных напряжений функциональных преобразователей 14 и 19 соответствуют формам ЭДС соответствующих секций 6, 7 якорной обмотки, т.е. f(ci) fi (оС), f7(aC)fHt), то выходное напряжение блока 10 сложения, как следует из сравнения формул (4) и (9), прямо пропорционально развиваемому вентильным электродвигателем электро.магнитному .моменту
и,о (of) (С) КйМ,к (d ),(10)
где К.„ - коэффициент пропорСетщ
циональности между развиваемым электродвигателем электромагнитным моментом и выходным напряжением блока 10 сложения.
Это напряжение поступает на вход блока 17 изменения знака напряжения, выходное напряжение которого равно по абсолютному- значению входному, а полярность определяется величиной напряжения на управляющем входе этого блока, поступающего на него с выхода блока 16 определения знака напряжения.
При положительной полярности напряжения, поступающего с выхода задатчика 15 электромагнитного момента на вход блока 16 определения знака напряжения, на его выходе устанавливается напряжение, соответствующее логической «1. При положительной полярности входного напряжения напряжение на выходе блока 17 изменения знака напряжения имеет положительную полярность.
Если напряжение, поступающее с выхода задатчика 15 электромагнитного момента на вход блока 16 определения знака напряжения, имеет отрицательную полярность, то на его выходе устанавливается напряжение, соответствующее логическому «О, а при положительной полярности входного напряжения напряжение на выходе блока 17 изменения знака напряжения имеет от рицательную полярность. В результате полярность выходного напряжения блока 17 изменения знака напряжения всегда соответствует полярности выходного напряжения задатчика 15 электромагнитного момента.
В установивщемся режиме работы мо- ментного вентильного электродвигателя при уменьшении развиваемого им электромагнитного момента, обусловленного, например, несинусоидальностью ЭДС и токов секций 4, 5 якорной обмотки, или неодинаковыми их амплитудными значениями, а также другими техническими причинами, уменьшается величина выходного напряжения блока 10 сложения и, соответственно, блока 17 изменения знака напряжения. Возрастает выходное напряжение блока 11 вычитания и увеличивается напряжение на управляющих входах управляемых усилителей 22, 23. Их коэффициенты усиления увеличиваются и увеличиваются также их выходные напряжения. Возрастают токи в секциях 6, 7 якорной обмотки и увеличивается развиваемый электродвигателем электромагнитный момент. Одновременно увеличивается и выходное напряжение блока 17 изменения знака напряжения. Это происходит до тех пор, пока оно не станет практически равным выходному напряжению задатчика 15 электромагнитного момента, т.е. заданному значению электромагнитного момента. При увеличении электромагнитного момента электродвигателя все происходит наоборот. В связи с тем, что выходные напряжения синусно-косинусного
датчика 3 положения ротора зависят только от положения ротора 2 двухфазной синхронной электрической машины 1, а все блоки замкнутого контура регулирования являются безынерционными звеньями, устранение отклонения электромагнитного момента от заданного значения происходит в каждый момент времени без запаздывания.
При увеличении выходного напряжения задатчика 15 электромагнитного момента
возрастает выходное напряжение блока 11 вычитаЕшя и, соответственно, напряжение на управляющих входах управляемых усилителей 20, 23. Увеличиваются их коэф фи- циенты усиления и увеличиваются их вы ходные напряжения. Возрастают токи в секциях 6, 7 якорной обмотки и увеличивается электромагнитный момент электродвигателя. Увеличение токов в секциях якорной обмотки приводит к возрастанию выходного напряжения блока 17 изменения знака
0 напряжения и при его практическо.м равенстве выходному напряжению задатчика 15 электромагнитного момента увеличение электромагнитного момента прекращается. Его величина становится равной заданной.
1} При уменьшении выходного напряжения задатчика 15 электромагнитного момента все происходит наоборот.
Эффективность предложенного мо.мент- ного вентильного электродвигате;1я заключается в повыпдении точности управления ei-o
0 электромагнитным моментом путе.м осуществления измерения его величины и регулирования по отклонению от заданного значе- ния. Отсутствие в замкнутом контуре регулирования инерционных звеньев позволяет повысить точность управления электромаг5 нитным моментом электродвигателя не только в установившемся режиме его работы, но и в переходных процессах.
Формула изобретения
Моментный вентильный электропривод, содержащий двухфазную си1 хронную электрическую машину, ротор которой сочленен с синусно-косипусным датчиком положения ротора, два датчика тока, включенные в це- пи секций якорной обмотки двухфазной синхронной электрической машины, два двухвходовых усилителя тока, к выхо.там которых подключены соответственно секции якорной обмотки, а к первым входам - вы
ходы соответствующих датчиков тока, олок
сложения, блок вычиташш, два блока умножения и функпиональный преобразователь формы напряжения, отличающийся тем, что, с целью повышения точности управления электромагнитным моментом, в него дополнительно введены задатчик электромагнитного момента, блок определения знака напряжения, блок изменения знака напряжения, регулируюн1ий усилитель, функциональный преобразователь формы напряжения, два предварительных усилителя, два управляемых усилителя, блок выделения модуля напряжения и блок реверса, при этом к выходу задатчика электромагнитного момента подключен первый вход блока вычитания и вход блока определения знака напряжения, выход которого подключен к управляющему входу изменения знака напряжения, выход которого подключен к второму входу блока вычитания, выход которого через регулирующий усилитель подключен к входу блока выделения модуля напряжения и входу блока реверса, к выходу которого подключен вход синусно-косинусного датчика положения ротора, к одному из выходов которого подключены входы первого предварительного усилителя и первого управляемого уси
лителя, а к другому выходу датчика положения - входы второго предварительного усилителя и второго управляемого усилителя, управляющий вход каждого управляемого усилителя подключен к выходу блока выделения модуля напряжения, а выход каждого управляемого усилителя подключен к второму входу соответствующего двухвходового усилителя тока, выходы первого и второго предварительных усилителя подключены соответственно через первый и второй функциональные преобразователи формы напряжения первым входом соответствующих блоков умножения, вторые входы которых подключены к выходам соответствующих датчиков тока, а выходы блоков умножения - к входам блока сложения, выход которого подключен к входу блока изменения знака напряжения.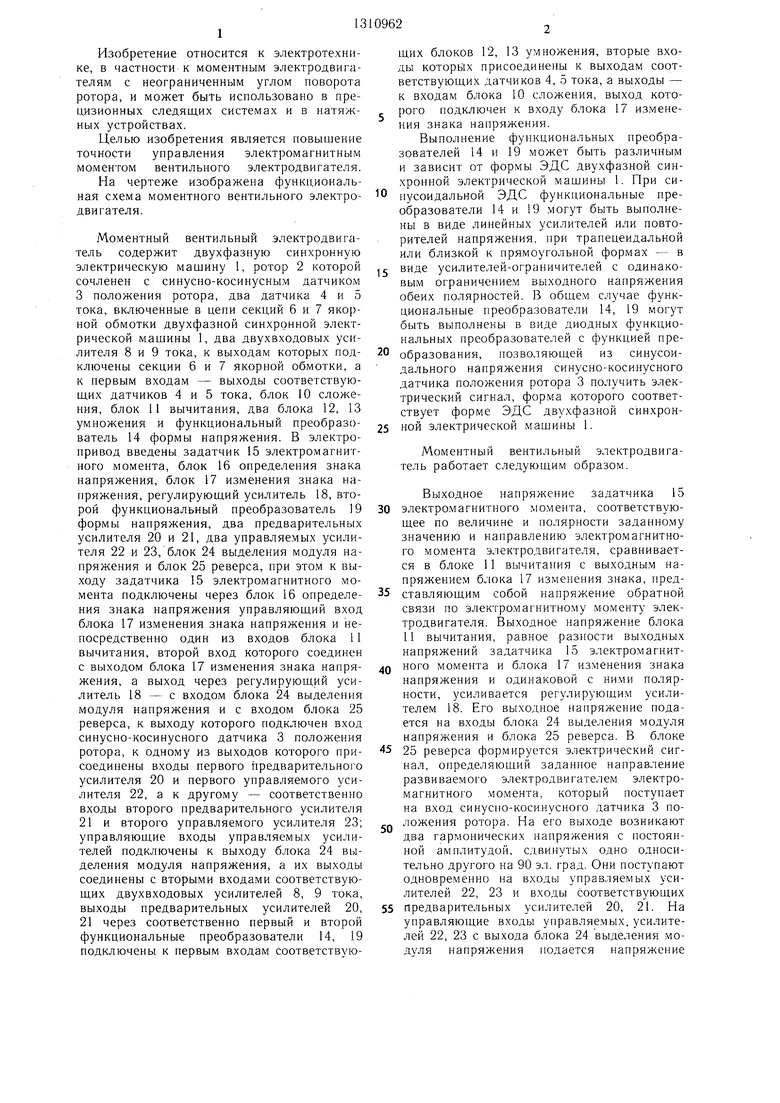


| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1986 |
|
SU1390764A1 |
| Реверсивный вентильный электропривод | 1985 |
|
SU1279040A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1132329A1 |
| Реверсивный вентильный электропривод | 1988 |
|
SU1598097A1 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1046864A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2012991C1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1153381A1 |
| Бесконтактный регулируемый электропривод | 1990 |
|
SU1830598A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1987 |
|
SU1515273A1 |
| Вентильный электродвигатель | 1989 |
|
SU1670753A2 |
Изобретение относится к электротехнике и может быть использовано в прецизионных следящих системах. Целью изоб ретения является повышение точности управления моментом. Указанная цель достигается тем, что в вентильный моментный электропривод введены задатчик 15 электромагнитного момента, блок 17 изменения знака напряжения, регулирующий усилитель 18, второй функциональный преобразователь 19 формы напряжения, два предварительных усилителя 20, 21, два управляемых усилителя 22, 23, блок 24 выделения модуля напряжения и блок 25 реверса. В электроприводе обеспечивается измерение электромагнитного момента электродвигателя и регулирование его величины по отклонепию от заданного значения. I ил. СЛ оо о со С5 1чЭ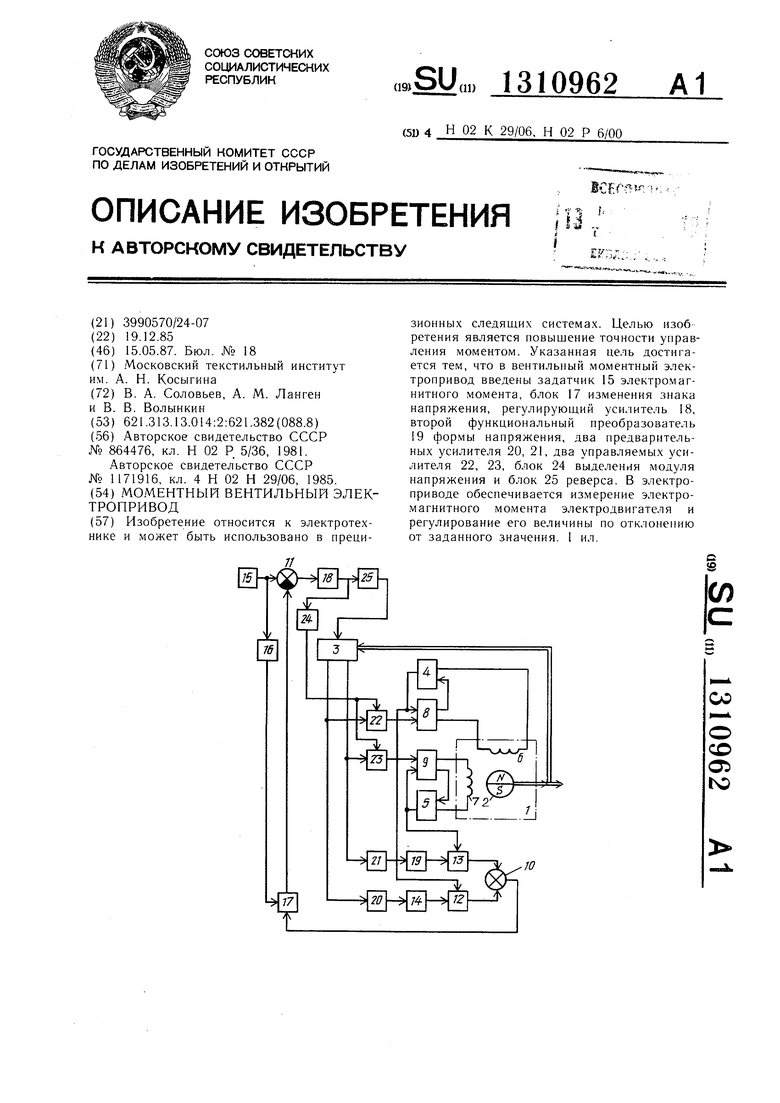
| Электропривод | 1979 |
|
SU864476A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Моментный вентильный электродвигатель | 1984 |
|
SU1171916A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
