Изобретение относится к транспортным устройствам и может быть использовано в конструкциях инвалидных колясок.
Известно транспортное средство для инвалидов, содержащее корпус с креслом, снабженный ведущими и ведомыми колесными парами и опорными элементами, связанными с корпусом посредством кривошипов с возможностью перемещения в продольных вертикальных плоскостях (см. пат. РФ 2034731, кл. В 62 В 9/04, 1991).
Недостаток этого решения - затрудненность управления транспортным средством при движении по лестнице и зигзагообразность траектории движения при движении на колесах, а также неравномерность нагрузки на приводах.
Известно также транспортное средство для инвалидов, содержащее раму с креслом, снабженную опорными ведущими и ведомыми колесными парами, обеспечивающими режим перемещения по плоской поверхности, и опорными элементами, обеспечивающими режим перемещения по лестницам, а также механизм перевода транспортного средства из одного режима движения в другой (см. пат. РФ 2104200, кл. В 62 В 9/04, 1998).
Недостаток этого решения - конструктивная сложность устройства и недостаточная степень надежности работы механизма шагания, которая зависит от надежности работы механизма блокировки опорных элементов и нагрузок на кривошип, обеспечивающий передачу на них движения.
Задачей на решение которой направлено заявленное решение является упрощение конструкции устройства и повышение безопасности при движении по лестнице.
Технический результат, получаемый при решении поставленной задачи, выражается в снижении трудоемкости изготовления и материалоемкости изделия и обеспечении высокой степени дублирования работы опорных элементов, исключающей возможность неконтролируемого соскальзывания по лестнице.
Для решения поставленной задачи, транспортное средство для инвалидов, содержащее раму с креслом, снабженную опорными ведущими и ведомыми колесными парами, обеспечивающими режим перемещения по плоской поверхности, и опорными элементами, обеспечивающими режим перемещения по лестницам, а также механизм перевода транспортного средства из одного режима движения в другой, отличается тем, что рама выполнена из двух полурам, каждая из которых снабжена колесной парой и парой опорных элементов, причем последним придана крестообразная форма, они установлены с возможностью вращения на горизонтальных осях и каждый из них, по отдельности, кинематически связан с валом отбора мощности, причем для передачи движения непосредственно на оси опорных элементов использованы червячные редукторы, кроме того, полурамы связаны друг с другом шарнирно, с возможностью поворота вокруг главной горизонтальной оси, размещенной как между осями вращения опорных колес, так и между осями вращения опорных элементов, кроме того, механизм перевода транспортного средства из одного режима в другой, выполнен в виде рычагов, жестко скрепленных, предпочтительно под прямым углом, с боковыми элементами одной из полурам, у точки расположения главной горизонтальной оси, причем рычаги снабжены упорами, установленными с возможностью взаимодействия с криволинейной направляющей поверхностью вертикальных пластин, снабженных отверстиями для размещения главной горизонтальной оси и жестко скрепленных с боковыми поверхностями второй полурамы, по бокам от кресла. Кроме того, упоры подпружинены вдоль продольной оси рычагов, а направляющие поверхности вертикальных пластин снабжены прорезями для фиксации в них упоров. Кроме того, вертикальная пластина выполнена в форме сектора, у вершины которого выполнено отверстие для размещения главной горизонтальной оси, а противоположная вершине кромка выполнена в виде криволинейной направляющей, взаимодействующей с упором рычага. Кроме того, вал отбора мощности установлен с возможностью кинематической связи с приводными колесами посредством фрикционной передачи, для чего вал жестко скреплен с фрикционным колесом и установлен с возможностью вращения вокруг горизонтальной оси на полураме, снабженной ведомой колесной парой.
Признаки отличительной части формулы изобретения решают следующие функциональные задачи:
Признаки "... рама выполнена из двух полурам, каждая из которых снабжена колесной парой и парой опорных элементов, ... кроме того, полурамы связаны друг с другом шарнирно, с возможностью поворота вокруг главной горизонтальной оси, размещенной между осями вращения опорных колес и опорных элементов", обеспечивают возможность заданного изменения типа опор, контактирующих с "дорожной" поверхностью т.е. возможность изменения режима движения.
Признаки "... последним (т.е. опорным элементам) придана крестообразная форма, при этом, они установлены с возможностью вращения на горизонтальных осях" обеспечивают возможность трансформации вращательного движения передаваемого на оси опорных элементов в "шагающий" режим.
Признаки "... каждый из них (опорных элементов), по отдельности, кинематически связан с валом отбора мощности, причем для передачи движения непосредственно на оси опорных элементов использованы червячные редукторы" обеспечивают высокую степень дублирования в работе опорных элементов и исключают самопроизвольное вращение опорных элементов под действием веса транспортного средства и инвалида, поскольку червячный редуктор является самотормозящейся системой, исключающей проворачивание червяка при воздействии на взаимодействующее с ним зубчатое колесо.
Признаки "... механизм перевода транспортного средства из одного режима в другой, выполнен в виде рычагов, жестко скрепленных, предпочтительно под прямым углом, с боковыми элементами одной из полурам, у точки расположения главной горизонтальной оси, и снабженных упорами установленными с возможностью взаимодействия с криволинейной направляющей поверхностью вертикальных пластин, снабженных отверстиями для размещения главной горизонтальной оси и жестко скрепленных с боковыми поверхностями второй полурамы, по бокам от кресла" обеспечивают перевод транспортного средства из одного режима движения (на опорных колесах) в другой (на опорных элементах) за счет изменения формы рамы взаимным поворотом полурам.
Признаки второго пункта формулы исключают возможность самопроизвольного перехода транспортного средства из одного режима движения - в другой.
Признаки третьего пункта формулы конкретизируют конструктивное исполнение вертикальной пластины.
Признаки четвертого пункта формулы конкретизируют конструктивное решение передачи движения с привода на опорные элементы.
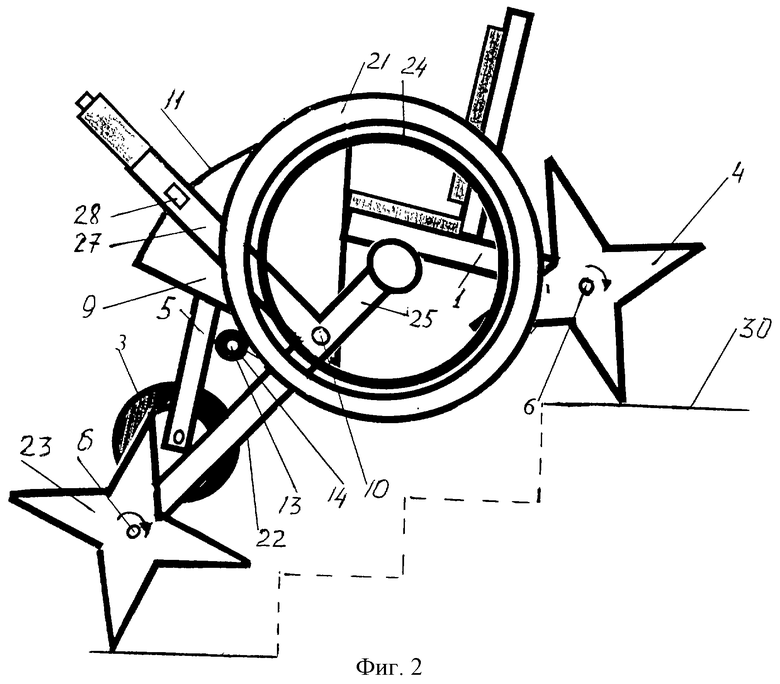
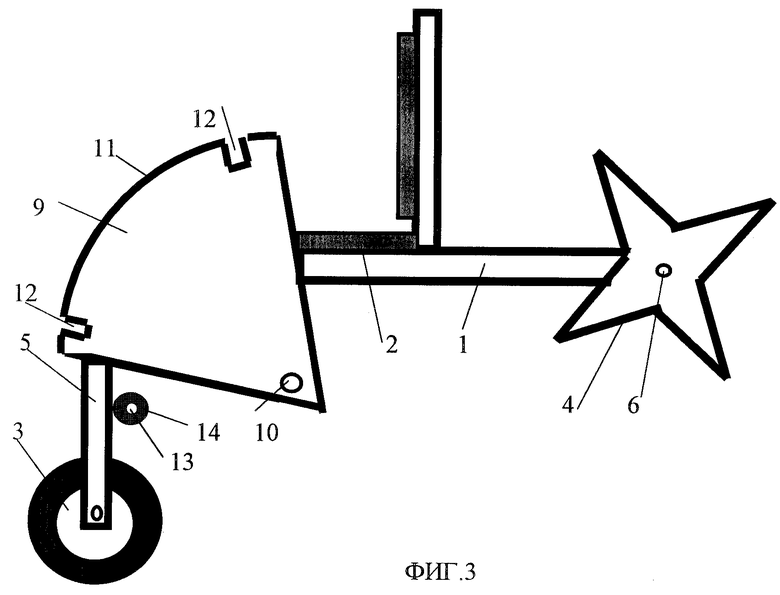
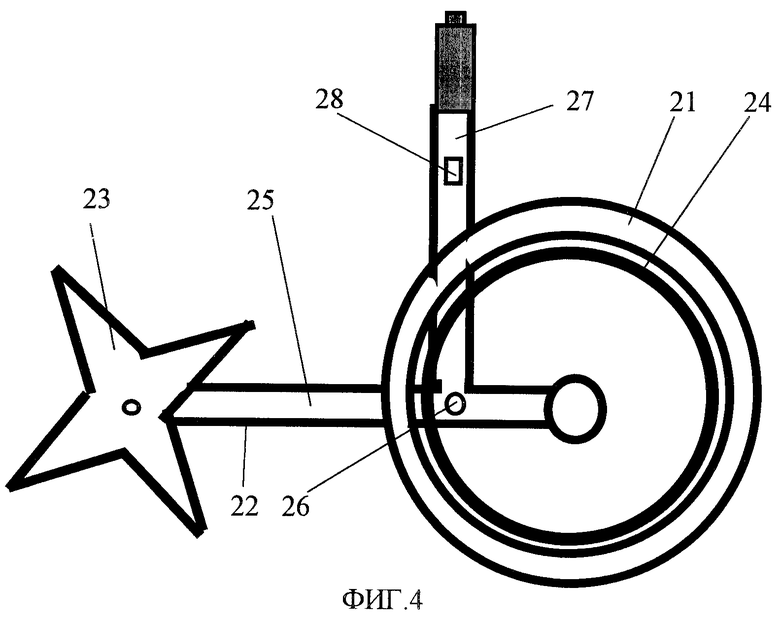
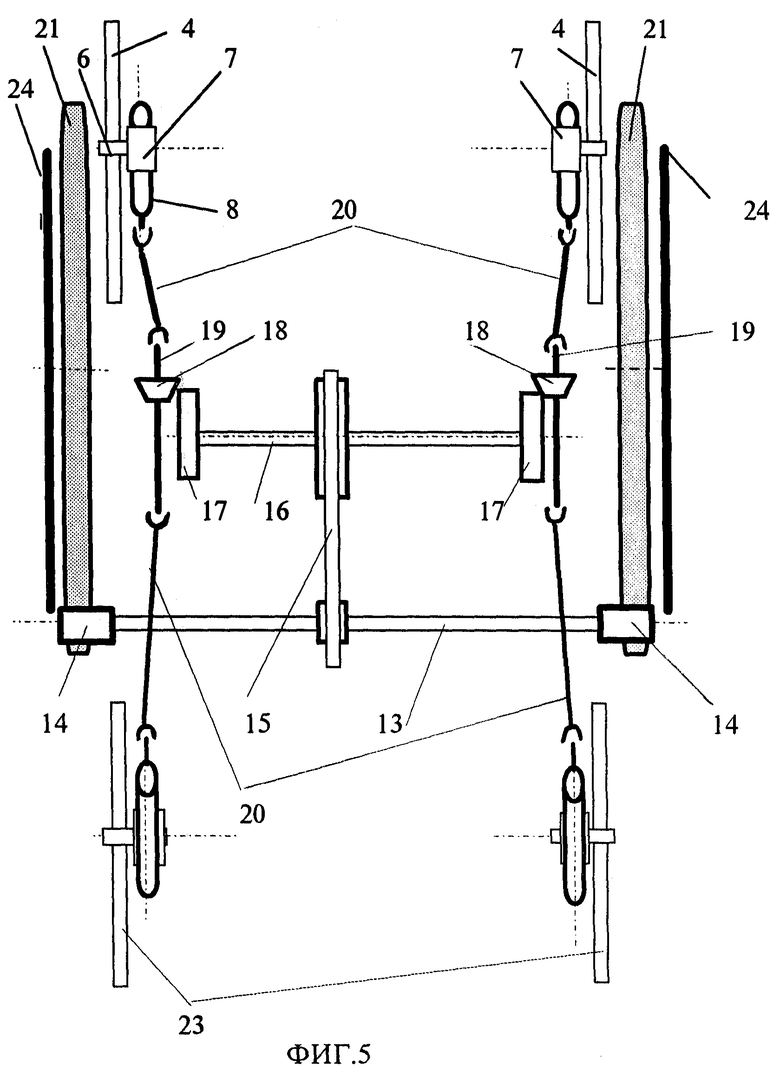
Заявленное устройство иллюстрируется чертежами, где на фиг.1 показан вид устройства сбоку при движении на колесах; на фиг.2 показан вид устройства сбоку при движении на опорных элементах; на фиг.3 - вид первой полурамы (снабженной креслом); на фиг.4 - вид второй полурамы; на фиг.5 показана кинематическая схема привода опорных элементов.
На чертежах показаны: первая (верхняя) полурама 1, снабженная креслом 2, (ведомой) колесной парой 3 и парой задних опорных элементов 4. Продольные ребра полурамы 1 имеют Г-образную форму, при этом короткий отрезок 5 является передним концом полурамы 1 и его конец снабжен колесной парой 3, каждое из колес которой является поворотным, неуправляемым. Конец длинного отрезка полурамы 1 содержит цапфы (не показаны) в которых размещены оси 6 опорных элементов 4, на которых жестко надеты шестерни 7, взаимодействующие с червячными колесами 8, образующие червячные редукторы, жестко скрепленные с соответствующими концами продольных ребер полурамы 1. Опорные элементы 4 выполнены в виде пластин крестовидной, в плане, формы, размещены по обеим сторонам полурамы 1, Плоскости этих пластин сориентированы вертикально и параллельно продольной оси транспортного средства. У колена (перегиба) полурамы 1 по обеим сторонам от кресла 2 закреплены вертикальные пластины 9, каждая из которых выполнена в форме сектора, у вершины которого выполнено отверстие для размещения главной горизонтальной оси 10, а противоположная вершине кромка выполнена в виде криволинейной направляющей 11 и снабжена прорезями 12. Кроме того, на коротком отрезке 5 полурамы 1 установлен с возможностью вращения вокруг горизонтальной оси вал отбора мощности 13, концы которого жестко связаны с фрикционными колесами 14. Вал отбора мощности 13, посредством цепной передачи 15 связан с распределительным валом 16. Концы распределительного вала 16 снабжены коническими шестернями 17, установленными с возможностью взаимодействия с коническими шестернями 18 приводных валов 19. Приводные валы 19, посредством карданных валов 20 связаны с червячными колесами 8 червячных редукторов. Эта кинематическая схема целесообразна при использовании мускульной силы человека для приведения в движение колес ведущей пары 21 транспортного средства. При механизированном приводе ведущих колес кинематическая схема привода опорных элементов существенно упрощается.
Кроме того, на чертежах показаны: вторая (нижняя) полурама 22, снабженная ведущей колесной парой 21 и парой передних опорных элементов 23, которые конструктивно аналогичны задним опорным элементам 4. К ободам ведущих колес, соосно с ними, с внешней стороны транспортного средства прикреплены кольцеобразные элементы 24, воздействуя на которые человек придает вращение ведущим колесам. Продольные ребра 25 полурамы 22 имеют прямолинейную форму. Цапфы для главной горизонтальной оси 10 выполнены в виде сквозных отверстий 26 в ребре 25, которые размещены между осями вращения опорных колес ведущей пары 21 (для каждого колеса своя ось) и передних опорных элементов 23. К продольным ребрам 25, перпендикулярно им, у точки расположения главной горизонтальной оси 10 жестко прикреплены рычаги 27. Рычаги 27 снабжены упорами 28, установленными с возможностью взаимодействия с криволинейной направляющей поверхностью 11 вертикальных пластин 9 (когда транспортное средство находится в сборе, т.е. полурамы 1 и 22 шарнирно скреплены друг с другом посредством главной горизонтальной оси 10, пропущенной через отверстия в ребрах 26 и вертикальных пластинах 9. Упоры 28 подпружинены вдоль продольной оси рычагов 27, а направляющие поверхности 11 вертикальных пластин 9 снабжены прорезями 12 для фиксации в них упоров 28. Свободные концы рычагов 27 выполнены в виде рукояток и снабжены кнопками нажимных рычажных механизмов (на чертежах), обеспечивающих "выключение" подпружиненности упоров 28 и их извлечение из прорезей 12.
Заявленное устройство работает следующим образом.
Режим движения по плоской поверхности. В этом режиме транспортное средство оперто на опорную поверхность 29 своими колесными парами (ведомой - 3 и ведущей 21); упоры 28 рычагов 27 зафиксированы (за счет упомянутой подпружиненности) в прорезях 12 (вертикальных пластин 9), наиболее удаленных от переднего конца полурамы 1, при этом пары задних 4 и передних 23 опорных элементов не контактируют с опорной поверхностью 29; фрикционные колеса 14 вала отбора мощности 13 не взаимодействуют с поверхностью колес колесной ведущей пары 21. Вращение ведущим колесам 21 придается соответствующим воздействием на кольцеобразные элементы 24. Поворот осуществляется за счет различной величины приводного усилия, прикладываемого к кольцеобразным элементам 24 колес 21, и свободного поворота ведомых колес 3.
Для перевода транспортного средства из режима движения по плоской поверхности в режим движения по лестницам человек "выключает" подпружиненность упоров 28 и извлекает их из прорезей 12 пластин 9. После этого отдает рычаги 27 вперед до западания упоров 28 в передние прорези 12. При этом полурамы 1 и 22 поворачиваются относительно главной горизонтальной оси 10 таким образом, что теперь транспортное средство оперто на опорную поверхность 29 своими опорными элементами 4 и 23, а колесные пары 3 и 21 не контактируют с опорной поверхностью 29. Одновременно фрикционные колеса 14 вала отбора мощности 13 прижимаются к поверхности ведущих колес 21.
После этого, режим движения по ступенькам 30 лестницы осуществляется при воздействии на кольцеобразные элементы 24 ведущих колес 21. При этом последние, вращаясь, передают вращение на фрикционные колеса 14 вала отбора мощности 13 и далее, посредством цепной передачи 15, на распределительный вал 16. Затем вращение передается на приводные валы 19 и далее, посредством карданных валов 20, на червячные колеса 8 червячных редукторов. С червячных колес 8 вращательное движение через шестерни 7 передается на оси 6 опорных элементов 4 и 23, что вынуждает их к повороту и соответственно к "шаганию", т. е. опорные элементы последовательно касаются поверхности ступеней 30 то одним, то другим лучом креста, причем это движение осуществляется синхронно всеми опорными элементами. Для повышения плавности хода (уменьшения амплитуды подъемов-опусканий) целесообразно, чтобы число "лучей" в каждом из опорных элементов было как можно большим, однако это в свою очередь приводит к необходимости увеличения длины таких элементов, что ограничивается реальными размерами хода руки человека, использующего данное транспортное средство. Поэтому в качестве формы опорного элемента принят крест. По завершению подъема по лестнице, транспортное средство переводят в режим движения "на колесах", для чего "выключает" подпружиненность упоров 28 рычага 27, извлекают их из прорезей 12 пластин 9 и отдают рычаги 27 назад до западания упоров 28 в задние прорези 12. При движении по лестнице все четыре опорных элемента работают синхронно, но независимо друг от друга. Червячные пары, передающие вращение на опорные элементы, работают в самотормозящемся режиме, т.е. исключают проворачивание червяков при передаче на них усилия со стороны опорных элементов. Тем самым исключается возможность непроизвольного соскальзывания транспортного средства по лестнице под действием силы тяжести.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДОВ | 2005 |
|
RU2306127C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2410071C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДОВ | 2012 |
|
RU2506068C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ В ПОМЕЩЕНИИ | 2014 |
|
RU2553026C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ КРЕСЛО-КОЛЯСКА | 2015 |
|
RU2611875C1 |
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |
| Коляска с функцией подъёма по лестницам для людей с ограниченными возможностями в ходьбе | 2019 |
|
RU2688289C1 |
| Коляска для людей с ограниченными возможностями в ходьбе | 2019 |
|
RU2688288C1 |
| ТРАНСФОРМИРУЕМОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2217119C1 |
| САМОХОДНОЕ КРЕСЛО ДЛЯ ИНВАЛИДОВ | 1991 |
|
RU2033125C1 |
Изобретение относится к креслам для инвалидов, обеспечивающим подъем по ступенькам посредством крестовин. Кресло состоит из двух полурам 1, 22, которые взаимно поворачиваются вокруг главной горизонтальной оси 10 посредством рычагов 27, которые скреплены с одной из полурам у точки расположения главной горизонтальной оси 10. При повороте полурам 1, 22 крестообразные опорные элементы 23 опираются на поверхность и приводятся в действие червячными редукторами, расположенными на их осях. Привод червячных редукторов осуществляется вращением вручную кольцеобразных элементов 24 на колесах 21 через фрикционные колеса 14 посредством трансмиссии. Техническое решение направлено на обеспечение безопасности при упрощении конструкции. 3 з. п. ф-лы, 5 ил.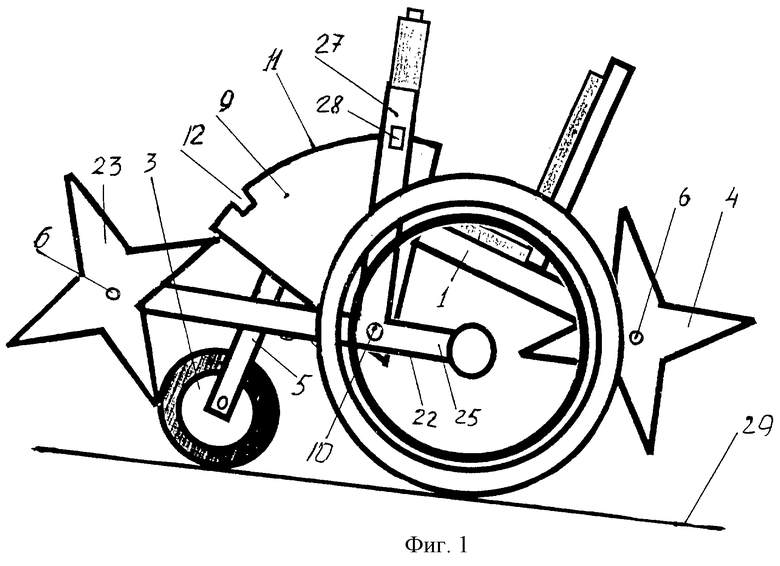
| Кресло-коляска | 1989 |
|
SU1690750A1 |
| US 5423563, 13.06.1995 | |||
| ТРАНСПОРТНОЕ УСТРОЙСТВО ШИШКОВА | 1994 |
|
RU2104200C1 |
| Инвалидная коляска | 1987 |
|
SU1507383A1 |
| US 3241848, 22.03.1966 | |||
| ТРЕХКОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДОВ | 1997 |
|
RU2128035C1 |
| Способ приготовления сернистого красителя защитного цвета | 1921 |
|
SU84A1 |
| US 4790548, 13.12.1988. | |||

