Изобретение относится к гидроакустической технике и может быть использовано для решения задач пассивного определения дистанции до шумящей цели при распространении гидроакустических сигналов в море.
Известен способ определения местонахождения объекта в режиме шумопеленгования, основанный на определении углов прихода "центров интенсивности" при ориентации акустической антенны по углу в вертикальной плоскости и на определении параметров лучевого пакета. В результате проведения корреляционной обработки появляется возможность определения местоположения объекта при известном акустико-гидрологическом распределении. В этом способе необходимым условием является решение траекторных уравнений звуковых лучей, т.е. теоретическое решение обратной задачи по восстановлению координат источника.
Известны энергетические методы, основанные на определении дистанции по излученному спектру корабля-цели. Для реализации этого способа требуется предварительная информация о спектре полезного сигнала в месте его излучения, о затухании акустической энергии в исследуемых полосах и о виде переходной характеристики среды.
Известен также способ определения дистанции до цели в режиме шумопеленгования, для реализации которого необходимы измерения потока взаимной энергии и полной взаимной энергии для различных мод колебаний, по их отношению определяется скорость переноса энергии и совместно с измеренной разностью времен регистрации звукового давления и колебательной скорости определяют дистанцию до цели.
Наиболее близким к заявляемому техническому решению является известный способ определения дистанции в режиме шумопеленгования (В.И.Клячкин, В.В.Яковлев авт. св. 54232, 1970 г.), основанный на приеме звукового давления и колебательной скорости с последующим образованием взаимной корреляции между ними. Дисперсионные характеристики среды при распространении звуковой энергии (фазовая и групповая скорости) в ограниченной среде (волноводе) определяются через функции взаимной корреляции в каждом канале; определенные таким образом скорости распространения и время запаздывания между звуковым давлением и колебательной скоростью дают возможность найти искомое расстояние до источника излучения. Недостатком этого способа является то, что он не обладает помехоустойчивостью по отношению к собственным шумам корабля-носителя, поскольку при определении скоростей распространения в каждом из каналов собственные шумы при движении корабля воздействуют на приемную антенну и не происходит отсройки от них.
Целью настоящего изобретения является повышение помехоустойчивости за счет уменьшения влияния собственных помех корабля-носителя на определение дистанции при сохранении скрытности. Указанная цель достигается тем, что, используя два пространственных канала, компенсируют время запаздывания между отдельными модами в этих каналах, вводя искусственное время задержки τ в заданной полосе Δf. Складывают сигналы, получая интерференционную структуру между этими сигналами. При движении корабля-носителя измеряют пространственный масштаб когерентности ΔΛmn - расстояние, соответствующее затуханию огибающей интерференционной структуры в е раз - и период интерференции Λmn - расстояние между двумя соседними максимумами.
Искомую величину - дистанцию до цели - определяют согласно выражению r=Δf·ΔΛmn, а затем уточняют в соответствии с выражением 
При распространении сигнала в ограниченной среде с вертикальным градиентом скорости звука образуются области, в которых происходит интерференция различных мод, (лучей), период пространственной структуры при этом зависит от того, какие моды участвуют при сложении сигналов. Так, например, при интерференции двух близких мод наблюдается наибольший период, а при сложении наиболее разнесенных мод пространственного спектра образуется наиболее короткий период интерференции. Тем самым появляется возможность измерения пространственного периода интерференции Λmn при движении корабля с некоторой скоростью v под углом α к направлению цели за время t.
Таким образом, для источников помехи (собственные шумы корабля винтового, структурного и гидродинамического происхождения), неподвижных по отношению к приемной антенне, период интерференции и масштаб когерентности становятся бесконечно большими, соответственно их спектральные компоненты сосредоточены вблизи нуля, т.е. образуют постоянную составляющую, которую при обработке сигнала можно отфильтровать и тем самым исключить влияние указанных источников шумов - собственных шумов корабля-носителя. Период Λmn определяется на выходе схемы сравнения (например, коррелятора) при введении некоторого искусственного времени запаздывания τ.
При постоянном значении τ и шумовом сигнале устойчивая интерференция может наблюдаться для некоторого расстояния, которое характеризуется пространственным масштабом когерентности мод "m" и "n", т.е. ΔΛmn.
Определим связь искомой величины r с измеряемыми параметрами звукового поля. Корреляционная функция шумового сигнала для случая многослойного волновода определяется (И.Толстой. Акустика океана. М.: Мир, 1969, стр.270):

где  - функция возбуждения мод "m" и "n", зависящая от положения приемной антенны, источника излучения и затухания в среде
- функция возбуждения мод "m" и "n", зависящая от положения приемной антенны, источника излучения и затухания в среде

 - пространственное волновое число моды "m"
- пространственное волновое число моды "m"

Um, Un - групповые скорости мод "m" и "n".
Из этих соотношений следует, что Λmn определяется фазовой структурой сигнала, содержащейся в модах "m" и "n", а ΔΛmn - связан с групповыми скоростям распространения этих мод.
Используя выражения (2) и (1), получаем, что максимум достигается, когда
Здесь n - число периодов интерференции, укладываемых на расстоянии r.
Из выражения (4) следует, что
Очевидно, что при использовании только фазовой информации возможна неоднозначность определения дистанции. Дисперсионное уравнение при волноводном распространении энергии связывает горизонтальную æn и вертикальную γn компоненты волнового вектора К в виде  . Поэтому и между горизонтальным периодом интерференции Λmn(r)=Λmn и вертикальным Λmn(z) также существует однозначная связь. В ряде случаев целесообразно проводить измерения вертикального периода, затем проводить пересчет в горизонтальный, по которому уже может быть определено расстояние до цели. А именно
. Поэтому и между горизонтальным периодом интерференции Λmn(r)=Λmn и вертикальным Λmn(z) также существует однозначная связь. В ряде случаев целесообразно проводить измерения вертикального периода, затем проводить пересчет в горизонтальный, по которому уже может быть определено расстояние до цели. А именно 
Отсюда видно, что поскольку  , следовательно, æmn<γmn и Λmn>Λmn(z).
, следовательно, æmn<γmn и Λmn>Λmn(z).
Используя выражения (3) и (1), имеем, что корреляционная функция максимальна при
или 
Выбирая за ΔΛmn расстояние Δr, при котором огибающая корреляционной функции при постоянных значениях и уменьшается на 3 дБ, то 
Поскольку r'=r+Δr, то  и
и

Здесь Δr' - расстояние, пройденное кораблем со скоростью v за время t по направлению к источнику. Если направление на источник составляет угол α с направлением движения, то фактически пройденное кораблем расстояние Δr=Δr'cosα.
Следовательно  ,
, 
Соотношения (8) и (6) определяют искомую величину при измеренных параметрах τ, Δf, v, t, α.
Для последующего более точного определения дистанции можно воспользоваться информацией, содержащейся в Λmn (выражение (5)), поскольку на этом этапе решение задачи уже будет однозначным.
При неизвестной скорости движения цели можно определить относительную скорость движения, основываясь на выражении (5). Действительно, Λmn определяется пространственной структурой поля сигнала, поскольку является результатом интерференции мод и не зависит от времени (или скорости движения корабля). Запаздывание τ при сближении (или удалении) источника и приемника, соответствующее максимуму Reψmn(r,z,τ), должно изменяться в зависимости от r и соответственно времени t при движении кораблей.
Определим производную по t в выражении (5) и тогда получим  .
.
Следовательно; измеряя  , получаем необходимую информацию об относительной скорости перемещения цели и корабля-носителя. На фиг.1 представлена структурная схема примера реализации способа, на основании которой можно более наглядно понять совокупность необходимых операций и их последовательность при определении дистанции до цели. Блок 1 представляет собой антенну (пространственный фильтр), формирующую две характеристики направленности, одна из них выделяет моды вблизи "m", а другая - вблизи "n". Сигнал с выхода блока 1 поступает на частотные фильтры 2, 3 с полосой Δf. С выхода блока 2 сигнал поступает на линию задержки 4. Задержанное на время напряжение с блока 4 перемножается в блоке 5 с напряжением, полученным на выходе блока 3. Блок 6 вырабатывает напряжение, пропорциональное полосе анализа Δf, а блок 7 - напряжение, пропорциональное величине времени задержки τ. Блок 8 перемножает напряжения с выходов блоков 6 и 7, т.е. Δfτ. На выходе блока 5 получаем напряжение, пропорциональное ΔΛmn. Напряжения с выходов блоков 5 и 8 перемножаются между собой в блоке 9.
, получаем необходимую информацию об относительной скорости перемещения цели и корабля-носителя. На фиг.1 представлена структурная схема примера реализации способа, на основании которой можно более наглядно понять совокупность необходимых операций и их последовательность при определении дистанции до цели. Блок 1 представляет собой антенну (пространственный фильтр), формирующую две характеристики направленности, одна из них выделяет моды вблизи "m", а другая - вблизи "n". Сигнал с выхода блока 1 поступает на частотные фильтры 2, 3 с полосой Δf. С выхода блока 2 сигнал поступает на линию задержки 4. Задержанное на время напряжение с блока 4 перемножается в блоке 5 с напряжением, полученным на выходе блока 3. Блок 6 вырабатывает напряжение, пропорциональное полосе анализа Δf, а блок 7 - напряжение, пропорциональное величине времени задержки τ. Блок 8 перемножает напряжения с выходов блоков 6 и 7, т.е. Δfτ. На выходе блока 5 получаем напряжение, пропорциональное ΔΛmn. Напряжения с выходов блоков 5 и 8 перемножаются между собой в блоке 9.
На выходе блока 9 получаем искомую величину, определяющую дистанцию до цели.
Эффективность предлагаемого способа заключается в следующее:
1. В предлагаемом способе в значительной степени удается отфильтровать помехи, обусловленные движением корабля-носителя и работой его механизмов, поскольку источники помехи на корабле являются неподвижными по отношению к системе отсчета, связанной с этим кораблем.
2. Дополнительно возникает возможность осуществлять избирательность целей по скорости их перемещения.
3. Способ позволяет получать обзор целей по дальности, поскольку при одной и той же пространственной структуре поля сигнала ΔΛmn, Λmn, формируемой волноводом при излучении несколькими независимыми источниками (целями), имеем для различных ri: (расстояния, на которых расположены цели от приемной антенны i=1,2...) совокупность значений τi.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2015 |
|
RU2602732C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИСТАНЦИИ ДО ЦЕЛИ | 1968 |
|
SU1840056A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТОРПЕДЫ | 2014 |
|
RU2568935C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ОБЪЕМНОГО РАССЕЯНИЯ ЗВУКА В ОКЕАНИЧЕСКОЙ СРЕДЕ | 1992 |
|
RU2012070C1 |
| УСТРОЙСТВО ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩЕМ В МОРЕ ОБЪЕКТЕ | 2015 |
|
RU2590933C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОДВОДНОЙ ШУМНОСТИ КОРАБЛЯ-ЦЕЛИ | 1989 |
|
SU1840512A1 |
| СПОСОБ ГИДРОАКУСТИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПРОТИВОТОРПЕДНОЙ ЗАЩИТЫ СУДОВ | 2015 |
|
RU2584355C1 |
| Способ пассивного определения пространственного положения обнаруженного шумящего в море подводного объекта позиционным стационарным гидроакустическим комплексом | 2023 |
|
RU2810698C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИСТАНЦИИ ДО ШУМЯЩЕГО ОБЪЕКТА | 2014 |
|
RU2550576C1 |
| Способ навигации и позиционирования подводных объектов в глубоководном канале на больших дальностях и система для его осуществления | 2018 |
|
RU2674404C1 |
Изобретение относится к гидроакустической технике и может быть использовано для пассивного определения дистанции до шумящей цели при распространении гидроакустических сигналов в море. Технический результат заключается в повышении точности определения при перемещении корабля-носителя путем исключения влияния его собственных шумов. Способ определения дистанции до источника излучения в режиме шумопеленгования основан на измерении разности времен прихода гидроакустического шумового сигнала в двух пространственных каналах и определении взаимной корреляции приходящего к приемникам шума. Для фиксированных значений разности времени прихода в заданной полосе частот одновременно измеряют пространственный масштаб когерентности и период интерференции сигналов и по измеренным величинам определяют дистанцию до источника излучения. 1 ил.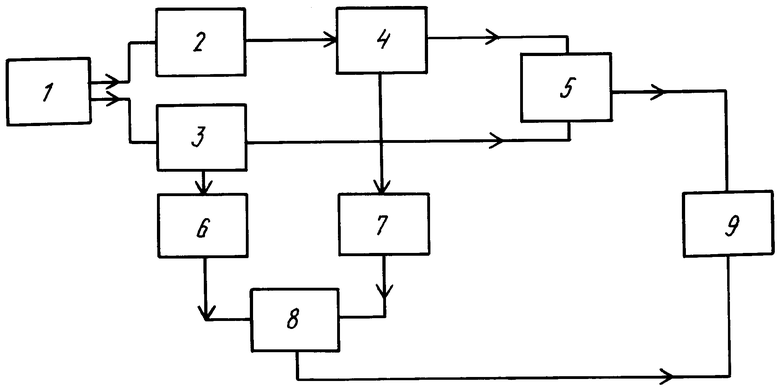
Способ определения дистанции до источника излучения в режиме шумопеленгования, основанный на измерении разности времен прихода гидроакустического шумового сигнала в двух пространственных каналах и определении взаимной корреляции приходящего к приемникам шума, отличающийся тем, что, с целью повышения точности определения при перемещении корабля-носителя путем исключения влияния его собственных шумов, для фиксированных значений разности времени прихода в заданной полосе частот одновременно измеряют пространственный масштаб когерентности и период интерференции сигналов и по измеренным величинам определяют дистанцию до источника излучения.
| Авт | |||
| св | |||
| Электрический светильник для местного освещения | 1937 |
|
SU54232A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

