Изобретение относится к области судовождения, в частности к автоматической стабилизации специальных судов, с которых производится многократное сбрасывание специальных изделий, так например геодезических буев, ложных целей, тралов и других изделий. Особенность процесса стабилизации судна после сбрасывания специальных изделий - это длительность процесса (заметная реакция судна проявляется спустя десятки секунд, когда принятие каких-либо мер для устранения появившегося сбоя в системе стабилизации оказывается уже поздно). Для повышения эффективности работы подобных систем в последние вводят прогнозирующие устройства, которые позволяют выдавать информацию судоводителю о будущем фазовом состоянии судна в момент времени Т прог. Прогноз фазовых координат судна вырабатывается практически сразу в момент времени сбрасывания специального изделия - То. Прогнозируется фазовое состояние судна через заданный фиксированный интервал времени tпрог = Т прог - То.
Известны способы прогнозирования фазового состояния судна для повышения качества управления [Г.Э. Шлейер, В.Г. Борисов. Управление движением морских и речных судов. Препринт. М., ИЛУ РАН, 1981 г., с. 38-53 ].
Способ основан на использовании:
- измерений текущего угла курса и угловой скорости,
- известных законов управляющих воздействий,
- электронной модели движения судна, в которой вычисляется в ускоренном масштабе времени будущее значение угла курса в заданное (будущее) время Тпрог = То + t прог.
Известен также способ прогнозирования курса судна, принятый нами в качестве прототипа [Судостроение, 1976 г., 3].
В способе используют:
- измерения текущих фазовых координат судна;
- известный закон изменения управляющего воздействия от момента времени То до Тпрог;
- электронную модель движения судна, в которой реализованы дифференциальные уравнения углового движения судна;
Вычисление будущего фазового состояния судна производится в ускоренном масштабе времени. Вычисления периодически повторяются через заданный интервал времени τ.
К недостаткам рассмотренных выше способов прогнозирования относится низкая точность из-за отсутствие коррекции при повторении вычислений будущего фазового состояния судна:
- нулевые условия вводятся однажды;
- не учитываются внешние воздействия;
- не уточняются управляющие воздействия;
- не уточняются параметры электронной модели движения судна.
Целью предложенного способа является повышение точности прогнозирования фазового состояния судна в заранее заданный (будущий) момент времени - Тпрог с устранением отмеченных выше недостатков.
Предложенный способ прогнозирования фазового состояния судна основан на использовании и уточнении:
- повторных дискретных измерений фазовых координат судна;
- электронной модели движения судна с коррекцией параметров;
- возмущающих и управляющих воздействий в прогнозируемый интервал времени t прог = Тпрог - То;
-коррекции величины суммарного воздействия при повторных циклах прогнозирования tпрог.i = Тпрог - (То + τ•i).
Поставленная цель достигается тем, что в качестве фазовых координат судна используют: скорость хода судна, угловую скорость, и угол дифферента, а также заранее запрограммированные возмущающие и управляющие силы и моменты, действующие на судно в интервале времени t прог.i. В момент сбрасывания изделия с судна То измеренные фазовые координаты принимают за начальные значения для вычисления в ускоренном масштабе времени угловой скорости и угла дифферента в заданный (будущий) момент времени Т прог, используя электронную модель движения судна, на вход которой вводят программные значения возмущающих и управляющих сил и моментов. Вычисленные значения прогнозируемых координат судна, соответствующие моменту времени Т прог, сравнивают с заданными допустимыми значениями, если прогнозируемые значения угловой скорости и угла дифферента вышли из допуска, полученную величину отклонения выдают оператору и прерывают прогнозирование, если прогнозируемые координаты не вышли из допустимых значений, то продолжают прогнозирование.
Через интервал времени τ измеренные фазовые координаты судна принимают за новые начальные значения для повторного вычисления в ускоренном масштабе времени угла дифферента и угловой скорости в заданный момент времени Тпрог, при этом на вход электронной модели движения судна поступают программные значения возмущающих и управляющих сил с момента времени То + τ до Т прог. Вычисленные прогнозируемые фазовые координаты сравнивают с допустимыми значениями, если не вышли из допуска, то продолжают процесс прогнозирования.
В момент времени (То + τ) + τ измеренные значения фазовых координат принимаются за начальные значения и вычисляется для момента времени Т прог угол дифферента и угловая скорость с использованием электронной модели движения судна, на вход которой поступают программные значения возмущающих и управляющих сил с (То + τ) + τ до Т прог. На вход электронной модели также поступает корректирующее значение силы, последнюю вычисляют на динамической модели судна, на вход которой поступают измеренные значения фазовых координат в момент времени То + 2τ, программные значения управляющих и возмущающих сил в момент времени То + 2τ и измеренное значение ускорения в момент времени То + 2τ, на выходе динамической модели судна вырабатывается отклонение суммарного программного воздействия, вычисленного по измеренной угловой скорости и измеренному угловому ускорению.
В момент времени То + 2τ кроме того уточняют параметры электронной модели, используя измеренные значения скорости хода судна в момент времени То + 2τ. Все перечисленные сигналы вводят в электронную модель движения судна. Полученные на выходе электронный модели движения судна прогнозируемые значения угла дифферента и угловой скорости сравнивают с допустимыми значениями, если не вышли из допуска продолжают процесс прогнозирования.
В интервалы времени То + 3τ, ... То + nτ, где n ≤ (Т прог -То)/τ, вновь, аналогично моменту времени То + 2To+2τ, вычисляются прогнозируемые значения угла дифферента и угловой скорости для момента времени Т прог, если эти значения превысят допустимые значения, то вырабатывается сигнал оператору о сбое в системе стабилизации или исполнительных средствах, таким образом в рассмотренном способе существенно повышена точность вычисления прогнозируемого значения угла дифферента и угловой скорости судна. Это достигается благодаря тому, что в моменты времени То+2τ, То+3τ,...То+nτ при повторных вычислениях предсказанного угла дифферента и угловой скорости уточняются:
- начальные значения угла дифферента и угловой скорости судна;
- корректируются результирующие значения сил, действующих на судно;
- корректируются параметры электронной модели в функции текущей скорости хода судна.
Для иллюстрации работы предложенного способа на чертеже приведена блок-схема устройства прогнозирования угла дифферента и угловой скорости судна, содержащая блок измерения 1, блок памяти 2, программные блоки 3, 4, электронную модель движения судна 5, динамическую модель судна 6, блок индикторов 7 и блок оценивания 8.
Приведенное устройство осуществляет циклически с интервалом времени -τ ускоренное моделирование будущего состояния корабля по углу дифферента и угловой скорости с момента времени после выхода изделия То+(τi=0, 2, 4, 6,...n с. ) до будущего значения времени Т прог (программный блок работы на чертеже не приведен).
В блоке измерения 1 вырабатываются текущие фазовые координаты движения судна:
- угол дифферента (ψ);
- угловая скорость судна (ω);
- скорость хода судна (V);
- угловое ускорение ( ).
).
Первые три фазовые координаты поступают в блок памяти 2, а угловое ускорение ( ) в динамическую модель корабля 6. Запоминание фазовых координат в блоке 2 производится при начале каждого цикла ускоренных вычислений (τi=0, 1, 2, n. . ). Из блока 2 фазовые координаты (в виде начальных значений ψio, ωio, Vio) поступают в электронную модель движения судна 5, в которой осуществляется в ускоренном масштабе времени вычисление предсказанных фазовых координат: ψ Т прог, ω Т прог, где Т прог - момент времени когда запланирован сброс следующего изделия.
) в динамическую модель корабля 6. Запоминание фазовых координат в блоке 2 производится при начале каждого цикла ускоренных вычислений (τi=0, 1, 2, n. . ). Из блока 2 фазовые координаты (в виде начальных значений ψio, ωio, Vio) поступают в электронную модель движения судна 5, в которой осуществляется в ускоренном масштабе времени вычисление предсказанных фазовых координат: ψ Т прог, ω Т прог, где Т прог - момент времени когда запланирован сброс следующего изделия.
Для вычисления прогнозируемого фазового состояния судна в электронную модель движения судна 5 из программных блоков 3, 4 поступает момент возмущения М воз из блока 3 и момент управления М упр из блока 4. Программные значения обоих моментов для дискретных значений времени от To+τi до Т прог используют в процессе каждого ускоренного цикла вычисления предсказанных значений фазовых координат судна. При каждом i-цикле вычислении производится также корректировка коэффициентов математической модели движения судна в функции от текущей скорости V i, измеренной в (То + τ•1) - момент времени, которая поступает из блока памяти 2 в блок 5. (Электронная модель движения судна 5 в простейшем виде может быть представлена в виде блока решения двух дифференциальных уравнений вида:
где ω, Ψ- угловая скорость и угол дифферента;
М воз, М упр - возмущающее и управляющее воздействие;
ΛMi = Miпрог-Mi. - коррекция управляющего и возмущающего воздействия;
Мi прог = (Мiвоз - Мiупр); ;
;
V - измеренная скорость хода судна;
τ=K•t - ускоренное время, К>>1.
Из зависимости (1) следует, что скорость хода судна V входит как параметр, который и перестраивается в процессе прогнозирования угловой скорости и угла дифферента).
Кроме того, в начале каждого i- вычисления корректируется результирующий момент, воздействующий на судно. На вход динамической модели судна 6 поступает измеренное ускорение из блока 1, линейная и угловая скорость корабля и программное значение результирующего воздействия на корабль из блока 5. На выходе блока 6 вырабатывается значение величины корректирующего момента, т. е. величины отклонения реального момента
от суммарного - программного момента
Мiпрог = (Мiвоз - Мiупр):
ΛМi = Miпрог - Мi.
(Динамическая модель судна 5 упрощенно может быть представлена в виде блоков, решающих систему дифференциально-алгебраических уравнений:
где d/dt измеренное угловое ускорение судна;
измеренное угловое ускорение судна;
ω- измеренная угловая скорость судна;
δ- угол перекладки руля).
Корректирующее значение момента (ΛМi) для ti = То + τ•i поступает в блок 5, где и формируются прогнозируемые значения дифферента и угловой скорости корабля в момент времени Тпрог с учетом коррекции:
- суммарного момента (М=Мi воз - Мi упр + ΛMi);
- нулевых значений (ψio, ωio, Vio),
- параметров математической модели в ti момент времени в функции скорости хода судна.
Вычисленные электронной моделью 5 прогнозируемые параметры: ψТпрог, ωТпрог поступают на вход индикатора 7 и в блок оценивания 8. В блоке 8 прогнозируемые значения сравниваются с допустимыми значениями и при выходе из допуска вырабатывается сигнал о сбое и прекращении процесса прогнозирования.
Проведенное блочное моделирование рассмотренного выше устройства подтвердило его работоспособность, а следовательно, и эффективность работы предложенного метода.
Приложение
Особенности программы моделирования прогнозирования фазовых координат судна
1. Моделируется в ускоренном масштабе времени процесс стабилизации корабля по углу дифферента ψ и угловой скорости ω с момента выхода первого изделия То=0 до намеченного времени выхода второго изделия Тпрог:
t прог = Тпрог - Тоб (tпрог = 140 с).
Предсказанные значения ψТпрог и ωТпрог выводятся на индикатор и блок оценивания. (Процесс движения судна в вертикальной плоскости обычно представляют в виде решения системы двух (трех) дифференциальных уравнений первого порядка с момента времени ti = То+τ•i, (i = 0,1,2,...,n) - начальное значение i-цикла до момента времени последующего сбрасывания изделия - Тпрог).
2. С интервалом времени τ = 2 с, после выхода первого изделия, снова вычисляют прогнозируемые значения: ψТпрог, ωТпрог в моменты времени ti= То+τ•i. До начала этих повторных вычислений осуществляется ряд перестроек:
- измеренные значения ψti и ωti используют как нулевые значения;
- програмные значения возмущающих сил и моментов: Fвоз, Мвоз и программные значения стабилизирующих воздействий: Fстаб, Мстаб, соответствующие моменту времени То + τ•i, принимаются за начальные значения для следующего повторного цикла вычисления;
- по измеренному значению углового ускорения  изм.ti, угловой 1 скорости ωизм.ti и программным значениям Мвоз.ti, Мупр.ti, используя динамическую модель движения корабля, формируют отклонение действительных значений суммарных моментов, действующих на корабль в момент времени ti = То + τ•i:Мti = (
изм.ti, угловой 1 скорости ωизм.ti и программным значениям Мвоз.ti, Мупр.ti, используя динамическую модель движения корабля, формируют отклонение действительных значений суммарных моментов, действующих на корабль в момент времени ti = То + τ•i:Мti = ( изм.ti, ωизм.ti), от суммарного программного момента Мвоз.ti - Мстаб.ti:
изм.ti, ωизм.ti), от суммарного программного момента Мвоз.ti - Мстаб.ti:
ΛMti = (Mвоз.ti-Mстаб.ti)-Mti;
корректируют значение момента, действующего на корабль:
Mкор.ti = (Mвоз.ti-Mупр.ti)-ΛMti;
- уточняют параметры электронной модели движения корабля в функции измеренного значения скорости хода корабля Vti в момент времени ti.
3. Через следующий интервал времени 2 с при То+(τ•i = 4 с) повторяется ускоренное вычисление угла дифферента и угловой скорости аналогично рассмотренному в пункте 2, но только с учетом, что τ•i соответствует уже 4 с , т. е. время процесса вычисления ψТпрог и ωТпрог сокращается на 4 с и начинается с момента времени ti = То+(τ•i = 4 с). Измеренные фазовые координаты судна и программные значения возмущающих и управляющих воздействий на судно в этот момент времени ti принимаются как начальные значения.
4. Количество вычислений τ•i max ≤ (Тпрог-То).
5. Если в процессе вычислений прогнозируемые значения угла дифферента или угловой скорости превысят допустимые значения, то срабатывает индикатор сбоя системы стабилизации и процесс прогнозирования останавливается (производится вычисление необходимой коррекции в составе используемых средств стабилизации корабля. Если даже при измененном составе исполнительных средств прогнозируемые параметры выходят из допустимых значений, то увеличивается интервал времени прогнозирования до таких размеров, пока прогнозируемые параметры не войдут в допустимые области).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ СУДНОМ С ДИАГНОСТИКОЙ | 2004 |
|
RU2267440C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
| УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ БУДУЩЕГО СОСТОЯНИЯ КОРАБЛЯ | 2001 |
|
RU2189624C1 |
| УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ И АНАЛИЗА ОБСТАНОВКИ ДЛЯ ГРУППЫ ПОДВИЖНЫХ ОБЪЕКТОВ | 2010 |
|
RU2447476C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2006 |
|
RU2319641C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ С СОВЕТЧИКОМ СУДОВОДИТЕЛЮ | 2010 |
|
RU2432296C1 |
| СПОСОБ ШВАРТОВКИ СУДНА | 2007 |
|
RU2350506C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
Способ основан на использовании фазовых координат судна: угловой скорости и угла дифферента и программных возмущающих и управляющих сил, действующих на судно. Их подают на вход электронной модели движения судна, работающей в ускоренном масштабе времени. На ее выходе вырабатываются предсказанные значения угловой скорости и угла дифферента в будущий момент времени Тпрог. В момент То на вход модели подают сигналы, пропорциональные вышеупомянутым силам, действующие с момента времени То до Тпрог. Сигналы прогнозируемых значений скорости и угла, вырабатываемые на выходе модели, сравнивают с их допусками: при превышении ими допуска выдают сигнал оператору о сбое в системе, и процесс прогнозирования прекращается, а при непревышении через интервал времени τ в момент времени То+ τ измеренные фазовые координаты судна принимают за начальные значения скорости и дифферента и вводят их на вход модели вместе с сигналами, пропорциональными упомянутым силам, действующим с момента времени То + τ до Тпрог. Прогнозируемые фазовые координаты, снимаемые с выхода модели движения судна, сравнивают с допусками. При их непревышении через следующий интервал времени τ в моменту То + 2τ уточняют значение коэффициентов модели движения судна, измеряя величину скорости хода, сравнивают сигнал, пропорциональный программному суммарному значению возмущающей и управляющей силы, с действительным значением воздействия суммарной силы. Его получают измерением ускорения и угловой скорости судна при То + 2τ. Полученную разность воздействий вводят на вход модели. Измеренные значения угловой скорости и угла дифферента принимают за начальные значения и вводят их на вход модели вместе с сигналами, пропорциональными возмущающим и управляющим силам, действующим с момента То + 2τ до расчетного времени Тпрог. Вырабатываемые на выходе модели прогнозируемые значения угловой скорости и угла дифферента сравнивают с допустимыми значениями. Если они укладываются в допуск, то в моменты времени То + 2τ, То + 3τ, . . То + nτ, аналогично моменту То + 2τ повторяют циклы вычисления значения прогнозируемой угловой скорости и прогнозируемого угла дифферента. Технический результат реализации изобретения заключается в повышении точности прогнозирования фазового состояния судна в заранее заданный момент времени Тпрог посредством восстановления действительного воздействия на судно и уточнения суммарного результирующего воздействия в начале цикла прогнозирования, а также путем уточнения параметров электронной модели движения судна по текущей скорости хода при каждом цикле прогнозирования. 1 ил.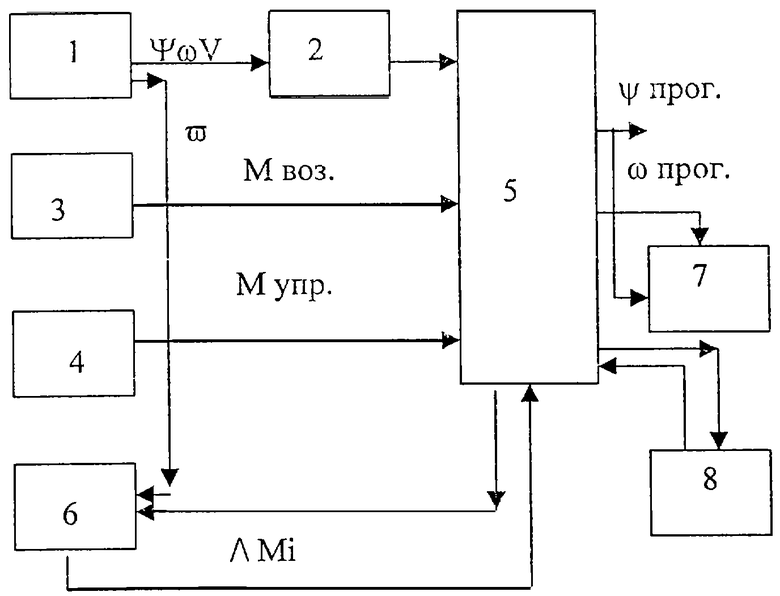
Способ прогнозирования фазового состояния судна, основанный на использовании фазовых координат судна: угловой скорости и угла дифферента и программных возмущающих и управляющих сил, воздействующих на судно, которые подают на вход электронной модели движения судна, работающей в ускоренном масштабе времени, на выходе которой вырабатываются предсказанные значения угловой скорости и угла дифферента в будущий момент времени “Тпрог.”, отличающийся тем, что в момент времени “То” на вход электронной модели движения судна подают сигналы, пропорциональные возмущающим и управляющим силам, действующим с момента времени “То” до “Тпрог.”, сигналы прогнозируемой угловой скорости и прогнозируемого угла дифферента, вырабатываемые на выходе электронной модели движения судна, сравнивают с заданными допустимыми значениями, если прогнозируемые координаты превысили заданный допуск, то выдают сигнал оператору о сбое в системе, и процесс прогнозирования прекращается, а если не превысили, то через интервал времени “τ” в момент времени “То+τ” измеренные фазовые координаты судна принимают за начальные значения угловой скорости и дифферента и вводят их на вход электронной модели движения судна, на вход которой также вводят сигналы, пропорциональные возмущающим и управляющим силам, действующим с момента времени “То+τ” до “Тпрог.”, прогнозируемые фазовые координаты угловой скорости и угла дифферента, снимаемые с выхода электронной модели движения судна, сравнивают с допустимыми значениями, если прогнозируемые координаты не превысили допустимые значения, то через следующий интервал времени “τ”, соответствующий моменту времени “То+2τ”, уточняют значение коэффициентов электронной модели движения судна, измеряя величину скорости хода судна, сравнивают сигнал, пропорциональный программному суммарному значению возмущающей и управляющей сил, с действительным значением воздействия суммарной силы, которое получают, измеряя величину ускорения и угловой скорости судна в момент времени “То+2τ”, полученную разность воздействий вводят на вход электронной модели движения судна, измеренные значения угловой скорости и угла дифферента принимают за начальные значения и вводят их на вход электронной модели движения судна, на вход которой также подают сигналы, пропорциональные возмущающим и управляющим силам, действующим с момента времени “То+2τ” до расчетного времени прогноза “Тпрог.”, вырабатываемые на выходе электронной модели движения судна значения прогнозируемой угловой скорости и прогнозируемого угла дифферента сравнивают с допустимыми значениями, если они укладываются в допуск, то в моменты времени “То+2τ”, “То+3τ”, ...“То+nτ”, аналогично моменту времени “То+2τ”, повторяют циклы вычисления значения прогнозируемой угловой скорости и прогнозируемого угла дифферента.
| RU 2071109 C1, 27.12.1996 | |||
| СИСТЕМА КОМПЛЕКСИРОВАННЫХ ИЗМЕРЕНИЙ ПАРАМЕТРОВ ДВИЖЕНИЯ КОРАБЛЯ | 1993 |
|
RU2065197C1 |
| ЭМУЛЬСИОННЫЙ ЛИКЕР И СПОСОБ ЕГО ПОЛУЧЕНИЯ | 1999 |
|
RU2151173C1 |
| GB 1492654 A, 23.11.1977 | |||
| US 3844242 A, 29.10.1974. | |||

