Предлагаемое изобретение относится к области судостроения - ручному управлению движением корабля по курсу с советчиком судоводителю.
Известен способ управления движением речного судна с использованием советчика судоводителю (в качестве советчика используется шкальный индикатор угловой скорости судна). Судоводитель, учитывая текущую угловую скорость судна (по индикатору угловой скорости) и текущий курс судна, определяет будущее направление движения судна, на которое оно выйдет, если с данного момента времени он вручную начнет сдерживание судна. Этот же способ управления с использованием устройства прогнозирования будущего направления движения морского корабля (патент России №2189624, Авт. св. СССР, заявка №5051561), позволяет определять момент времени, когда судоводителю следует начинать процесс сдерживания для выхода корабля на прогнозируемое советчиком направление движения.
Известен способ прогнозирования с использованием задатчика курса (Авт. св. СССР №610721, принятый нами в качестве прототипа), который включает блоки: измеритель угла курса и угловой скорости, вычислитель, индикатор и исполнительные устройства. Рассматриваемый способ ручного управления движением корабля с использованием советчика судоводителю облегчает процесс ручного управления переходом корабля (сдерживания) на новое направление движения. В советчике судоводителю формируется будущее направление движения корабля с использованием сигналов текущего курса φ, угловой скорости ω и угла перекладки руля δ. В вычислительном блоке формируется сигнал будущего состояния корабля по углу курса φпрогн.i=f [φ,ω,δi(t)]. (Для сигналов δi, изменяющихся от δ0… до δn при этом вычисляются будущие значения сигналов от φпрогн.0 …до φпрогн.n, перебор осуществляется в ускоренном времени за время τт).
При равенстве сигнала: φпрогн.n=φзд.(φзд.- заданное значение курса корабля, на который нужно перейти) судоводитель устанавливает сигнал δn в начальное состояние δ0 (осуществляется процесс сдерживания корабля с момента натурального времени tn+τт в соответствии с расчетной программой, заложенной в вычислительном блоке).
Недостатками приведенного выше способа управления являются:
- в советчике формируется момент времени, когда следует начинать сдерживание судна, что не позволяет эффективно использовать такой советчик в режиме стабилизации на заданном курсе (процесс ручного управления движением инерционного корабля с использованием прогнозатора советчика),
- при наличии морского волнения судоводитель определяет требуемое управляющее воздействие для выхода на желаемое направление движения с низкой точностью прогноза, т.к. не учитывается смещение руля для компенсации постоянной составляющей от внешнего возмущающего момента.
Целью предлагаемого способа управления является устранение отмеченных выше недостатков, а именно:
- облегчение процесса ручного управления движением инерционного корабля с использованием предлагаемого советчика (это достигается тем, что осуществляется формирование информации о будущем состоянии корабля через время, близкое к постоянной времени корабля - Ткораб., и это происходит практически мгновенно, т.е. судоводитель управляет как бы «безинерционным объектом»),
- повышение точности выработки прогнозируемых значений при наличии развитого морского волнения.
Предлагаемый способ управления движением базируется на использовании советчика судоводителю, который содержит блоки:
программный, измерительный, исполнительных средств, ручного управления и индикатор. Существенно, что советчик судоводителю дополнен электронной моделью движения корабля (работающей в ускоренном масштабе времени) и блоком среднего значения угла перекладки руля δср.
Выход программного блока (сигнал заданного курса - φзд.) вводят на вход индикатора. Сигналы курса φ и угловой скорости ω (из измерительного блока) вводят на первый вход электронной модели движения корабля, на два других входа которой вводят сигналы угла перекладки руля δ (из блока исполнительных средств) и сигнал среднего значения угла перекладки руля δср. (из блока среднего значения угла перекладки руля). В электронной модели движения корабля формируется сигнал будущего состояния корабля по углу курса φпрогн. в виде суммы сигналов

где φпрогн. (τт) - прогнозируемый курс корабля в момент времени (ti+τт), соответствующий углу перекладки руля δi,
τт- время моделирования процесса движения в ускоренном масштабе времени, пропорциональное постоянной времени корабля
Ткораб..=Кускор·τт
Сигнал угла перекладки руля δ (из блока исполнительных средств) вводят в блок среднего значения угла перекладки руля для формирования среднего значения угла перекладки руля δср.
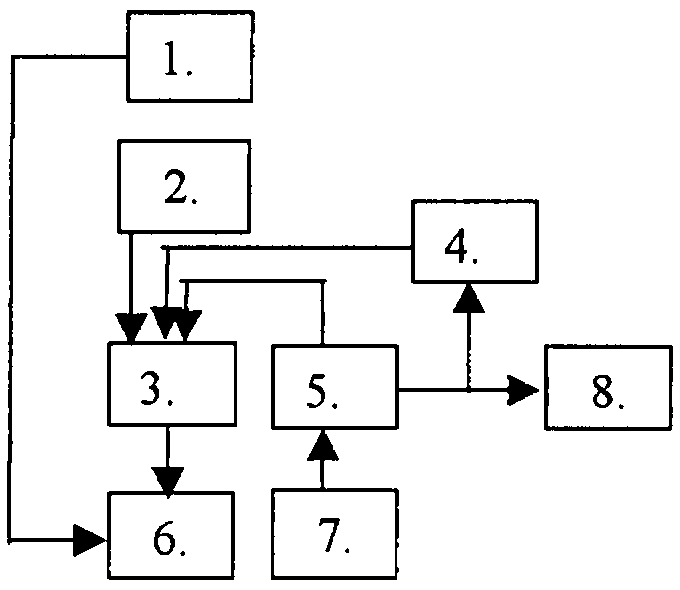
Для иллюстрации использования предложенного способа рассмотрим чертеж, на котором приведен советчик судоводителю, состоящий из блоков со связями между ними: 1. программный, 2. измерительный, 3. электронная модель движения корабля (работает в ускоренном масштабе времени), 4. среднего значения угла перекладки руля, 5. исполнительных средств, 6. индикатора, 7. ручного управления, 8. корабль - объект управления.
Советчик судоводителю можно реализовать с использованием типовых микроконтроллеров (блоки 1, 3, 4), блок 2 - аппаратура типа «Мининавигация» (разработки ЦНИИ «Электроприбор», С.Петербург), блок 6 стрелочные, либо световые измерители с сумматором, блок 5 корабельный (штатный) рулевой привод, блок 7 - задатчик угла перекладки руля.
Предложенный советчик судоводителю может использоваться совместно с типовой системой автоматического управления движением (САУД) корабля как резервный режим ручного управления движением корабля при выходе из строя какого-либо модуля САУД.
(Современные САУД позволяют практически полностью автоматизировать процесс управления движением корабля, что создало парадокс автоматизации - исключили судоводителя из процесса управления, а следовательно, и лишили его способности (навыка) вручную управлять движением инерционым кораблем. Наличие советчика судоводителю позволит судоводителю при сбое в САУД эффективно управлять движением корабля вручную.)
Судоводитель отклонением рукоятки в блоке ручного управления судоводителя 7 выдает сигнал задания в блок исполнительных средств 5 на перекладку руля. На индикаторе 6 при любой величине перекладки руля δi будет вырабатываться будущее направление движения корабля φпредск., на которое выйдет корабль через время Ткорабля. Изменяя величину перекладки руля δi, судоводитель обеспечит движение корабля по заданному направлению, если
φпредск.= φзд.
где
φзд.- заданное (программное) значение курса, которое также высвечивается в индикаторе с использованием сигнала φзд. из программного блока,
φпредск.- предсказанное значение курса, на который выйдет корабль через время - Ткорабля (при фиксированном угле перекладки руля δi в течение времени Ткорабля).
Рассмотрим работу советчика судоводителю при ручном управлении движением корабля по заданному курсу.
В программном блоке 1 вырабатывается сигнал заданного значения курса φзд, который поступает в индикатор 6 для выдачи информации судоводителю. В измерительном блоке 2 вырабатывается сигнал текущего значения курса φ. и угловой скорости корабля ω, которые вводятся на вход электронной модели движения корабля 3. В электронной модели в ускоренном масштабе времени Мτ моделируется процесс динамики движения корабля в интервале времени τт. Для повышения точности прогноза в качестве угла перекладки руля в зависимости (1) формируют корректированный угол перекладки руля
δiкopp.=δi-δср.,
где δср. - среднее значение угла перекладки руля.
Сигнал φпредск. с выхода электронной модели движения корабля алгебраически суммируется с сигналом угловой скорости ω, в соответствии с зависимостью (1), который и поступает в индикатор.
Проведенное моделирование подтвердило целесообразность использования предложенного способа ручного управления кораблем с использованием советчика судоводителю.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОТКАЗОБЕЗОПАСНОГО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2010 |
|
RU2432297C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ С ДИАГНОЗОМ СБОЕВ | 2009 |
|
RU2394721C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ ПРИ РАЗВИТОМ МОРСКОМ ВОЛНЕНИИ | 2008 |
|
RU2368536C1 |
| АППАРАТУРА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ С БЛОКОМ ДИАГНОСТИКИ | 2009 |
|
RU2420424C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2009 |
|
RU2388650C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| АППАРАТУРА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ ПРИ ВОЛНЕНИИ | 2009 |
|
RU2392181C1 |
| Задатчик угла перекладки руля | 1982 |
|
SU1057379A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2006 |
|
RU2305050C1 |
| СПОСОБ ОТКАЗОУСТОЙЧИВОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ ПО ГЛУБИНЕ | 2012 |
|
RU2513157C1 |
Изобретение относится к технике ручного управления движением корабля по курсу. Способ управления движением корабля с советчиком судоводителю позволяет судоводителю при использовании советчика осуществлять эффективное ручное управление инерционным кораблем при появлении сбоя в системе автоматического управления. Это достигается благодаря формированию в ускоренном масштабе времени сигнала прогноза будущего состояния корабля по курсу. Для повышения точности прогноза при формировании сигнала прогнозированного значения курса исключается из сигнала угла перекладки руля среднее (балансировочное) значение угла перекладки руля. 1 ил.
Способ управления движением корабля с советчиком судоводителю с использованием в советчике блоков: программного, измерительного, исполнительных средств, индикатора и ручного управления, на выходе которого формируется управляющий сигнал, поступающий на вход блока исполнительных средств, отличающийся тем, что дополнительно используют блок среднего значения перекладки руля и электронную модель движения корабля, на вход которой вводят три сигнала: курса - φ с выхода измерительного блока, угла перекладки руля - δ с выхода блока исполнительных средств и среднего значения угла перекладки руля - δср с выхода блока среднего значения перекладки руля, на вход которого вводят сигнал угла перекладки руля - δ с выхода блока исполнительных средств, на выходе электронной модели движения корабля формируют сигнал прогнозируемого состояния корабля по курсу - φпрогн и угловой скорости - ωпрогн в ускоренном масштабе времени с использованием сигналов φ, ω, δ и δср, сигналы с выхода электронной модели движения корабля φпрогн(τт) и ωпрогн(τт), где τт - время моделирования процесса движения в ускоренном масштабе времени, суммируют, затем вводят на вход индикатора, на вход которого также вводят сигнал заданного значения курса - φзд из программного блока.
| Задатчик курса судна с прогнозированием | 1976 |
|
SU610721A1 |
| УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ БУДУЩЕГО СОСТОЯНИЯ КОРАБЛЯ | 2001 |
|
RU2189624C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2006 |
|
RU2319641C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СУДНОМ С ДИАГНОСТИКОЙ | 2004 |
|
RU2267440C1 |
| НЕЙРОСЕТЕВОЙ РЕГУЛЯТОР ДЛЯ УПРАВЛЕНИЯ КУРСОМ СУДНА | 2007 |
|
RU2359308C2 |

